You might also like
- VectorcopioDocument19 pagesVectorcopioyamitinfanteNo ratings yet
- Tema 05 - Captadores Digitales de Imagen.Document65 pagesTema 05 - Captadores Digitales de Imagen.lluigplaNo ratings yet
- Reloj Aereo o Pantalla PovDocument7 pagesReloj Aereo o Pantalla PovJONATHAN TERAN RUIZNo ratings yet
- Usb Con Pic18f4550 y Labview - Rev 2012Document18 pagesUsb Con Pic18f4550 y Labview - Rev 2012Maicol Javier D M80% (5)
- Latch y flip-flop: Análisis de circuitos con NE555, 74LS02 y TTL7473Document9 pagesLatch y flip-flop: Análisis de circuitos con NE555, 74LS02 y TTL7473franz barraNo ratings yet
- TV 7 PDFDocument16 pagesTV 7 PDFLuis Arturo Leiva MonjarasNo ratings yet
- EA-03 Codificador EstéreoDocument10 pagesEA-03 Codificador EstéreoPCTrax55 tutos100% (1)
- Camaras CCD PDFDocument18 pagesCamaras CCD PDFJavier Alejandro AndradeNo ratings yet
- Control Del TLC5940Document4 pagesControl Del TLC5940bernejorgeNo ratings yet
- Fundamentos del color y señal de videoDocument23 pagesFundamentos del color y señal de videoKeyla RisueñoNo ratings yet
- Microcontroladores AVRDocument3 pagesMicrocontroladores AVRMarcos EstrellaNo ratings yet
- P04r Bootloader HID USB PDFDocument11 pagesP04r Bootloader HID USB PDFangelaNo ratings yet
- Manual PIC 18F4550-1Document244 pagesManual PIC 18F4550-1Sandro Julián Panana EspinoNo ratings yet
- Formato digital Betacam y sus característicasDocument16 pagesFormato digital Betacam y sus característicasAbel Llorente ArizaNo ratings yet
- ConfigurarFUSESDocument9 pagesConfigurarFUSESJuan Pablo Garcia LanderoNo ratings yet
- Tema 1 Práctico - Conectorizado en TelefoníaDocument26 pagesTema 1 Práctico - Conectorizado en Telefoníaangel j. robledilloNo ratings yet
- Presentación Curso Arduino PDFDocument28 pagesPresentación Curso Arduino PDFJuan Luis AguilarNo ratings yet
- PCB LayoutDocument23 pagesPCB LayoutAlex CortezNo ratings yet
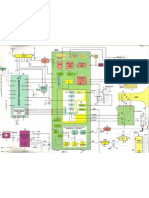
- Diagrama A Bloques de Un TV ModernoDocument1 pageDiagrama A Bloques de Un TV ModernoSergio Guerra100% (1)
- Introduccion A Diseño Con FPGA 2022Document113 pagesIntroduccion A Diseño Con FPGA 2022KAREN ANDREA HOLGUIN RODRIGUEZNo ratings yet
- Implementacion de BootloaderDocument5 pagesImplementacion de BootloaderManuel HTNo ratings yet
- Diseño de Un Amplificador Transistorizado de Microondas para Portadoras de 650 MHZDocument7 pagesDiseño de Un Amplificador Transistorizado de Microondas para Portadoras de 650 MHZLuis M ArciaNo ratings yet
- Informe Amplificador Clase DDocument14 pagesInforme Amplificador Clase DjheystonNo ratings yet
- Capítulo 3 - Laboratorio de Comunicaciones OpticasDocument22 pagesCapítulo 3 - Laboratorio de Comunicaciones OpticasAntony FernandezNo ratings yet
- Medición de señales eléctricas con osciloscopio y generadorDocument8 pagesMedición de señales eléctricas con osciloscopio y generadorLAURA RAMIREZ OTERONo ratings yet
- Saber Electronica 298Document84 pagesSaber Electronica 298Gregorio Ramon Castro EstradaNo ratings yet
- Electronica y Servicio Sesenta y TresDocument0 pagesElectronica y Servicio Sesenta y TresAdan Bio-ChemNo ratings yet
- Informe 1 DACDocument9 pagesInforme 1 DACJose ArmandoNo ratings yet
- Folleto Productos Saber ElectronicaDocument21 pagesFolleto Productos Saber ElectronicaCODE0303456No ratings yet
- Temporizadores DspicDocument41 pagesTemporizadores DspicGerardo Antonio TrejoNo ratings yet
- Exposición PDFDocument20 pagesExposición PDFandresNo ratings yet
- Manual HFK 010uDocument10 pagesManual HFK 010ujonathanNo ratings yet
- Curso Básico de Microcontroladores PICDocument50 pagesCurso Básico de Microcontroladores PICEdison Correa0% (1)
- 4-001contador ProgramableDocument11 pages4-001contador ProgramableDiego LaviniNo ratings yet
- Practica 3 Avr's (Teclado y Eeprom)Document14 pagesPractica 3 Avr's (Teclado y Eeprom)Cristian AlbánNo ratings yet
- Reloj VHDLDocument7 pagesReloj VHDLAntonioNo ratings yet
- Control Digital de Velocidad de Un Motor DCDocument16 pagesControl Digital de Velocidad de Un Motor DCLuis Enrique Zapata Valenzuela100% (1)
- Elektor 319 (Dic 2006)Document65 pagesElektor 319 (Dic 2006)Carlos ArévaloNo ratings yet
- Clase - 1 - CALLIOPE - VIRTUAL AccesoDocument6 pagesClase - 1 - CALLIOPE - VIRTUAL AccesoLaura Sofia Parra SotoNo ratings yet
- Mpeg-4 TeoriaDocument5 pagesMpeg-4 TeoriaDvdSkafarNo ratings yet
- ADC Con Pico-BlazeDocument13 pagesADC Con Pico-BlazeIvan RomoNo ratings yet
- Arquitectura basada en contexto para el soporte de servicios de VoD de IPTFrom EverandArquitectura basada en contexto para el soporte de servicios de VoD de IPTNo ratings yet
- Ok Fundamentos de CCTVDocument35 pagesOk Fundamentos de CCTVLuis Manuel Perez LopezNo ratings yet
- CCTV Sistema Circuito Cerrado TelevisiónDocument29 pagesCCTV Sistema Circuito Cerrado TelevisiónMilka Jael100% (1)
- Final - Control de Calidad Del Llenado de Botellas en Tiempo Real Con Sistemas Embebidos PDFDocument9 pagesFinal - Control de Calidad Del Llenado de Botellas en Tiempo Real Con Sistemas Embebidos PDFLennin RamiroNo ratings yet
- Resoluciones vídeoDocument6 pagesResoluciones vídeoARCADE LJANo ratings yet
- base unoDocument69 pagesbase unoSergio RodriguezNo ratings yet
- Capítulo 31Document5 pagesCapítulo 31victor dominguezNo ratings yet
- Manual de Instalación de Un Circuito Cerrado de Televisión CCTVDocument33 pagesManual de Instalación de Un Circuito Cerrado de Televisión CCTVtigrecelioNo ratings yet
- Practica 8 - Ritz Flora Carlos Alberto - Grupo - 5 - VLSIDocument8 pagesPractica 8 - Ritz Flora Carlos Alberto - Grupo - 5 - VLSIRitz Flora Carlos AlbertoNo ratings yet
- Diseño de sistema VGA con PIC16F84Document20 pagesDiseño de sistema VGA con PIC16F84Jean Pierre Cordova ArismendizNo ratings yet
- Resoluciones DIGITALESCCTVDocument4 pagesResoluciones DIGITALESCCTVpipoNo ratings yet
- Principios Basicos de CCTV 1Document40 pagesPrincipios Basicos de CCTV 1Kevin Rey50% (2)
- Ficha Tecnica Camara Axis 221Document2 pagesFicha Tecnica Camara Axis 221Rafael Prado PerezNo ratings yet
- Introduccion CCTVDocument4 pagesIntroduccion CCTVJorge Martin Gomez CusiNo ratings yet
- Actividades T-7Document4 pagesActividades T-7Marcgandia MiñanaNo ratings yet
- CCTV Axis DocumentacionDocument69 pagesCCTV Axis DocumentacionFrank Rodas Carrasco100% (1)
- Sistemas de CCTVDocument4 pagesSistemas de CCTVCësar EduardoNo ratings yet
- Expediente Tecnico CCTVDocument7 pagesExpediente Tecnico CCTVjeffrey Garcia JibajaNo ratings yet
- Camara Tipo DomoDocument4 pagesCamara Tipo DomoDiana Gonzales MariñoNo ratings yet
- Sistemas OperativosDocument368 pagesSistemas OperativosJefferson GranizoNo ratings yet
- Temario Parcil 1 Mate 2 FINALDocument2 pagesTemario Parcil 1 Mate 2 FINALLalo AngelNo ratings yet
- tesisLuisLeyva PDFDocument158 pagestesisLuisLeyva PDFHECTORNo ratings yet
- 1 Pasa PolyisoDocument3 pages1 Pasa PolyisoLalo AngelNo ratings yet
- Carta Poder EditableDocument1 pageCarta Poder EditableNecrotemor NecrosNo ratings yet
- Tutorial Punteros y Arreglos ANSI CDocument49 pagesTutorial Punteros y Arreglos ANSI CJulian Alexander Vargas JimenezNo ratings yet
- Carta Poder 1Document84 pagesCarta Poder 1Lalo AngelNo ratings yet
- Diseño Conceptual de Productos MecatronicosDocument28 pagesDiseño Conceptual de Productos MecatronicosfransscribdNo ratings yet
- Java Desde CeroDocument90 pagesJava Desde CeroJhon Pichihua HNo ratings yet
- Vehiculos Espaciales y Misiles IDocument149 pagesVehiculos Espaciales y Misiles IAlbertoPrudencio100% (1)
- SASE2013 Ejemplos de Aplicaciones Con FPGADocument20 pagesSASE2013 Ejemplos de Aplicaciones Con FPGAJosé Ramón IglesiasNo ratings yet
- Simak, Clifford D - CiudadDocument193 pagesSimak, Clifford D - Ciudadapi-3800925100% (1)
- IntegracionDocument16 pagesIntegracionWYlemVelasquezzNo ratings yet
- Estimacion Optima Basada en GPS Del Erro PDFDocument141 pagesEstimacion Optima Basada en GPS Del Erro PDFLalo AngelNo ratings yet
- Blindaje MagneticoDocument13 pagesBlindaje MagneticoLalo AngelNo ratings yet
- IntegracionDocument16 pagesIntegracionWYlemVelasquezzNo ratings yet
- 4 5 PDFDocument2 pages4 5 PDFCarlosRodriguezNo ratings yet
- Ejercicios ResueltosDocument12 pagesEjercicios ResueltosRicardo Fernandez PalloNo ratings yet
- Tesis DoctoralDocument209 pagesTesis DoctoralLalo AngelNo ratings yet
- Predictor de Smith EXPLICACIONDocument11 pagesPredictor de Smith EXPLICACIONjricardo01976No ratings yet
- Obtencion de Parametros de Un Motor de C-1 PDFDocument13 pagesObtencion de Parametros de Un Motor de C-1 PDFjaquetonaNo ratings yet
- Fracciones SimpleesDocument4 pagesFracciones SimpleesManu GimenezNo ratings yet
- Capitulo 1Document1 pageCapitulo 1Lalo AngelNo ratings yet
- Fi 101Document2 pagesFi 101Lalo AngelNo ratings yet
- GhanttDocument4 pagesGhanttLalo AngelNo ratings yet
- Lecturas CiberaulaDocument32 pagesLecturas CiberaulaJose Rodolfo Morales MartinezNo ratings yet
- Capitulo 5Document26 pagesCapitulo 5Lalo AngelNo ratings yet
- Arquitectura Computadoras IDocument115 pagesArquitectura Computadoras IDave DonaldNo ratings yet
- Metodologia de Diseño MecanicoDocument109 pagesMetodologia de Diseño MecanicoLalo AngelNo ratings yet
- Ficha Técnica Rayos XDocument7 pagesFicha Técnica Rayos XJOSCELINE MONTSERRAT CASTILLO ALCUDIANo ratings yet
- 8 Jugando Con Los Colores - Atencion y ConcentracionDocument55 pages8 Jugando Con Los Colores - Atencion y Concentracionricardo martinezNo ratings yet
- Ficha Técnica DH SD49225 HC LA en EspañolDocument3 pagesFicha Técnica DH SD49225 HC LA en EspañolMelina CastilloNo ratings yet
- Xentrion Catalogo 2017Document307 pagesXentrion Catalogo 2017Xentrion S.A de C.V.No ratings yet
- Camara EstenopeicaDocument7 pagesCamara EstenopeicaOtto CarballoNo ratings yet
- 5 - Color - Rellenos y TransparenciasDocument21 pages5 - Color - Rellenos y TransparenciasGiovanni CardozoNo ratings yet
- Formatos de imagen y compresión para videovigilanciaDocument12 pagesFormatos de imagen y compresión para videovigilanciaWilson GuzmanNo ratings yet
- Cmos Vs CCDDocument3 pagesCmos Vs CCDIsrael Ulises Balderas AngelesNo ratings yet
- LP - Linea - CCTV-HDCVI-Q3-22 - DIGICORP-1Document20 pagesLP - Linea - CCTV-HDCVI-Q3-22 - DIGICORP-1galuchitoNo ratings yet
- Hac T1a21n 02 Datasheet DomoDocument3 pagesHac T1a21n 02 Datasheet DomoOtto SalinasNo ratings yet
- Curso de FotografiaDocument7 pagesCurso de FotografiaMarcos Manuel Crisostomo MartinezNo ratings yet
- Guion para Video Portada HifuDocument3 pagesGuion para Video Portada HifuVictor MauricioNo ratings yet
- Código de Procesamiento de ImagenDocument6 pagesCódigo de Procesamiento de ImagenDaniel AgurtoNo ratings yet
- Unidad 4 - Taller - GráficosDocument11 pagesUnidad 4 - Taller - GráficosSuly Tatiana HenaoNo ratings yet
- Libro PoncherazoDocument26 pagesLibro Poncherazofabian JauvenNo ratings yet
- Radiologos AutorizadosDocument5 pagesRadiologos AutorizadosJeremy LopezNo ratings yet
- Nikon F70 F70DDocument136 pagesNikon F70 F70DRoger Castellano PiñolNo ratings yet
- EXI TEMA 10 - Formato CondicionalDocument25 pagesEXI TEMA 10 - Formato CondicionalrogerNo ratings yet
- Tarjetas Lecto LSEDocument14 pagesTarjetas Lecto LSEmaestrapt pt 3No ratings yet
- Teoría color no aburridaDocument15 pagesTeoría color no aburridaDiana Saramaga BachNo ratings yet
- Funcionamiento de El Equipo de Rayos XDocument15 pagesFuncionamiento de El Equipo de Rayos XCristinoRGonzalezRNo ratings yet
- Manual Flash Gloxy GX F990 HSSDocument14 pagesManual Flash Gloxy GX F990 HSSYositengofeisPeronoteloenseñoNo ratings yet
- HISTORIA DE LA FOTOGRAFÍA - Línea de Tiempo - Paola Parra PDFDocument25 pagesHISTORIA DE LA FOTOGRAFÍA - Línea de Tiempo - Paola Parra PDFpaolavero100% (1)
- La Producción AudiovisualDocument8 pagesLa Producción AudiovisualLorena MontenegroNo ratings yet
- Cuadernillo VocalesDocument32 pagesCuadernillo VocalesMaby PulidoNo ratings yet
- Historia de La FotografiaDocument6 pagesHistoria de La FotografiabravelionessNo ratings yet
- Katherine Leandra Selva Libante PDFDocument3 pagesKatherine Leandra Selva Libante PDFKathy Selva LibanteNo ratings yet
- Material Fundamentos de La FotografiaDocument22 pagesMaterial Fundamentos de La Fotografiacamilo mancillaNo ratings yet
- SENATI - Sesion 01Document46 pagesSENATI - Sesion 01mundonets.aNo ratings yet
- Dictamen Pericial de Fotografia Forense - Academia Forense de PeritosDocument8 pagesDictamen Pericial de Fotografia Forense - Academia Forense de PeritosEVELYN DENNISSE SALAZAR NARRONo ratings yet