You might also like
- NB04L 02 FD11 Standard SpecificationsDocument22 pagesNB04L 02 FD11 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- NV06 02 FD11 Standard SpecificationsDocument22 pagesNV06 02 FD11 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- Installation Manual CIZM-4 20110107Document4 pagesInstallation Manual CIZM-4 20110107Haroldo RamosNo ratings yet
- 8mm CCD Image Sensor Guide for Security CamerasDocument22 pages8mm CCD Image Sensor Guide for Security Camerasأحمد زغارىNo ratings yet
- CD4069UBEDocument32 pagesCD4069UBEaerknbznmisdovdzooNo ratings yet
- CD 4069Document32 pagesCD 4069freddys merchanNo ratings yet
- CD4069UB CMOS Hex Inverter: 1 Features 3 DescriptionDocument31 pagesCD4069UB CMOS Hex Inverter: 1 Features 3 DescriptionTam Le DinhNo ratings yet
- Denon DN-S3500Document60 pagesDenon DN-S3500Tevel ComNo ratings yet
- CD4069UB CMOS Hex Inverter: 1 Features 3 DescriptionDocument32 pagesCD4069UB CMOS Hex Inverter: 1 Features 3 DescriptionGaston TaboadaNo ratings yet
- CD 4069 UbDocument30 pagesCD 4069 UbRodrigo CesarNo ratings yet
- Micro-USB ConnectorsDocument4 pagesMicro-USB ConnectorsTonpitonpi Ton PiNo ratings yet
- Manual de Instalacao Comando New10000 1500micaDocument12 pagesManual de Instalacao Comando New10000 1500micaFrancisco CruzNo ratings yet
- DCP02 Series, 2-W, 1000-V Isolated, Unregulated DC/DC Converter Modules 1 Features 3 DescriptionDocument33 pagesDCP02 Series, 2-W, 1000-V Isolated, Unregulated DC/DC Converter Modules 1 Features 3 DescriptionAvs ElectronNo ratings yet
- Color Change Rotary SW To Absolute Encoder 0011 TTD 2000 10 PDFDocument16 pagesColor Change Rotary SW To Absolute Encoder 0011 TTD 2000 10 PDFAlonso IbarraNo ratings yet
- Fax Option Type C2550/ C2530 Machine Code: D432/ D433 Field Service ManualDocument142 pagesFax Option Type C2550/ C2530 Machine Code: D432/ D433 Field Service ManualДмитрий РазуваевNo ratings yet
- PR23MF11NSZ Series PR33MF11NSZ Series: I (RMS) 0.3A, Non-Zero Cross Type DIP 8pin Triac Output SSRDocument15 pagesPR23MF11NSZ Series PR33MF11NSZ Series: I (RMS) 0.3A, Non-Zero Cross Type DIP 8pin Triac Output SSRChang ChangNo ratings yet
- Denon DNX1500 MixDocument60 pagesDenon DNX1500 MixgndleeNo ratings yet
- FA Wiring Solution Catalogue ContentsDocument132 pagesFA Wiring Solution Catalogue ContentsLong Hứa XuânNo ratings yet
- Service Manual DJM350WDocument6 pagesService Manual DJM350WSilvinho JúniorNo ratings yet
- NR-B29SG2 NR-B29SW2 NR-B32SG2 NR-B32SW2: Refrigerator-FreezerDocument97 pagesNR-B29SG2 NR-B29SW2 NR-B32SG2 NR-B32SW2: Refrigerator-FreezerIhorNo ratings yet
- DF010D TeDocument5 pagesDF010D TeTyron RebellonNo ratings yet
- SWTH, D120 - TS5-01, Issue 05Document10 pagesSWTH, D120 - TS5-01, Issue 05droftahsps4No ratings yet
- 0-10V AHU DX Coil Interface (LC / VRF) Installation Manual: EnglishDocument36 pages0-10V AHU DX Coil Interface (LC / VRF) Installation Manual: EnglishAhmed Salah Abd EL-WahedNo ratings yet
- NEWKer 18imi Series Controller Installation GuideDocument12 pagesNEWKer 18imi Series Controller Installation GuideElenilton MelchiorsNo ratings yet
- DFT23PH52224-01 清源菲力宾跟踪系统安装指导书 EzTracker D1P20 V1.0Document33 pagesDFT23PH52224-01 清源菲力宾跟踪系统安装指导书 EzTracker D1P20 V1.0Kevs MacsNo ratings yet
- Varistores PDFDocument20 pagesVaristores PDFDaniel SantosNo ratings yet
- Compaq 610 Notebook DisassemblyDocument31 pagesCompaq 610 Notebook DisassemblySunita SinghNo ratings yet
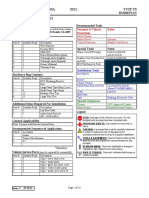
- Toyota Tacoma 2012 - Tvip V5 Part Number: PT398-35121: PreparationDocument22 pagesToyota Tacoma 2012 - Tvip V5 Part Number: PT398-35121: PreparationTomas OrozcoNo ratings yet
- Tlx84X Current-Mode PWM Controllers: 1 Features 3 DescriptionDocument26 pagesTlx84X Current-Mode PWM Controllers: 1 Features 3 DescriptionAnonymous t9tLb3WgNo ratings yet
- Slvs 038 IDocument28 pagesSlvs 038 Igabriel6276No ratings yet
- KX-TG4111MEB KX-TG4112MEB KX-TGA410MEB: Telephone EquipmentDocument79 pagesKX-TG4111MEB KX-TG4112MEB KX-TGA410MEB: Telephone Equipmentangel quinteroNo ratings yet
- LT230 Ine-307bDocument15 pagesLT230 Ine-307bviscadanNo ratings yet
- MICRO-COMPUTER BASED DIGITAL INDICATOR INSTRUCTION MANUALDocument16 pagesMICRO-COMPUTER BASED DIGITAL INDICATOR INSTRUCTION MANUALIsrar HussainNo ratings yet
- S102T01/S102T02 S202T01/S202T02: Low Height Type Solid State RelaysDocument3 pagesS102T01/S102T02 S202T01/S202T02: Low Height Type Solid State RelaysRick HunterNo ratings yet
- Denon DN-MC6000 PDFDocument82 pagesDenon DN-MC6000 PDFboroda2410No ratings yet
- Toshiba Photocouplers for Triac Driving and Solid State RelaysDocument3 pagesToshiba Photocouplers for Triac Driving and Solid State RelaysRi Cha RdNo ratings yet
- On Semiconductor Datasheet NCP360Document10 pagesOn Semiconductor Datasheet NCP360Albert van BemmelenNo ratings yet
- Samsung Ln26a330j1d Ln32a330j1d Ln37a330j1d Ln40a330j1d Chassis N45a FullDocument275 pagesSamsung Ln26a330j1d Ln32a330j1d Ln37a330j1d Ln40a330j1d Chassis N45a Fullfalken0001No ratings yet
- FTM 3100 - FTM3200 Service ManualDocument34 pagesFTM 3100 - FTM3200 Service ManualKo Azani76% (21)
- Lmx58-N Low-Power, Dual-Operational Amplifiers: 1 Features 3 DescriptionDocument25 pagesLmx58-N Low-Power, Dual-Operational Amplifiers: 1 Features 3 DescriptionWilliam RamírezNo ratings yet
- TV LCD - Samsung LN32A550P3R Chasis N43A PDFDocument152 pagesTV LCD - Samsung LN32A550P3R Chasis N43A PDFjose carlos100% (1)
- Service Manual: GR-D93US, GR-D94USDocument22 pagesService Manual: GR-D93US, GR-D94USsilictronicNo ratings yet
- Thchnical Manual: Hyper Inverter Packaged Air-ConditionersDocument210 pagesThchnical Manual: Hyper Inverter Packaged Air-ConditionersJOHON SANCHEZNo ratings yet
- Power - LF06P2-W5F-840Document4 pagesPower - LF06P2-W5F-840afelipef27No ratings yet
- Denon dn-d4000 v.1 (ET)Document50 pagesDenon dn-d4000 v.1 (ET)avshalleNo ratings yet
- DCU SeriesDocument4 pagesDCU SeriesSupakanit LimsowanNo ratings yet
- RET Antenna With Type B C Brackets Installation GuideDocument8 pagesRET Antenna With Type B C Brackets Installation GuideMaksim BobylinskiNo ratings yet
- PC3SF21YVZBFDocument15 pagesPC3SF21YVZBFVukica IvicNo ratings yet
- TL 082Document50 pagesTL 082pacoNo ratings yet
- tl084 PDFDocument50 pagestl084 PDFErick MMtNo ratings yet
- PC817XJ0000F Series: DIP 4pin General Purpose PhotocouplerDocument15 pagesPC817XJ0000F Series: DIP 4pin General Purpose PhotocouplerbjrjNo ratings yet
- PR 36 MF 22Document13 pagesPR 36 MF 22bahmanNo ratings yet
- Ir ADV C50xx - C70xx - C90xx PRO Bulletin - Fluctuated Vertical Line On The Image ReadDocument7 pagesIr ADV C50xx - C70xx - C90xx PRO Bulletin - Fluctuated Vertical Line On The Image Readtroy2k0No ratings yet
- CTX Control Relays: 87045 LIMOGES CedexDocument5 pagesCTX Control Relays: 87045 LIMOGES CedexHenry Roger Sanchez AguilarNo ratings yet
- Service Information: Date: No.: SI-B01024 (1/1) Model No. SER - No. S/M No. PGDocument2 pagesService Information: Date: No.: SI-B01024 (1/1) Model No. SER - No. S/M No. PGandrecaproniNo ratings yet
- Spek K Kdu572eveDocument4 pagesSpek K Kdu572eveanton wahyuNo ratings yet
- lm158 N PDFDocument39 pageslm158 N PDFYahel Zopel ZucenNo ratings yet
- Radio Frequency Transistors: Principles and practical applicationsFrom EverandRadio Frequency Transistors: Principles and practical applicationsRating: 4 out of 5 stars4/5 (3)
- Operating Manual - RobotStudio 2019.2 Rev.Z PDFDocument290 pagesOperating Manual - RobotStudio 2019.2 Rev.Z PDFXanti Zabala Da RosaNo ratings yet
- RobotStudio Operation Manual PDFDocument298 pagesRobotStudio Operation Manual PDFEmanuelNo ratings yet
- RobotStudio Operation Manual PDFDocument298 pagesRobotStudio Operation Manual PDFEmanuelNo ratings yet
- Operating Instructions - KL4000 V10 enDocument231 pagesOperating Instructions - KL4000 V10 enXanti Zabala Da RosaNo ratings yet
- RobotWare 6 DatasheetDocument4 pagesRobotWare 6 DatasheetXanti Zabala Da RosaNo ratings yet
- E Series Installation and Connection ManualDocument114 pagesE Series Installation and Connection ManualXanti Zabala Da RosaNo ratings yet
- Program Editor User ManualDocument14 pagesProgram Editor User ManualXanti Zabala Da RosaNo ratings yet
- Product GuidanceDocument1 pageProduct GuidanceXanti Zabala Da RosaNo ratings yet
- Kawasaki Controller E Series External I-O Manual PDFDocument84 pagesKawasaki Controller E Series External I-O Manual PDFXanti Zabala Da RosaNo ratings yet
- Release Notes RobotStudio 2019-5 PDFDocument44 pagesRelease Notes RobotStudio 2019-5 PDFXanti Zabala Da RosaNo ratings yet
- DENSO Manual CastellanoDocument692 pagesDENSO Manual CastellanoJulianna LizcanoNo ratings yet
- Denso Robotic V - BegDocument168 pagesDenso Robotic V - BegSam eagle goodNo ratings yet
- Kawasaki Controller E Series External I-O Manual PDFDocument84 pagesKawasaki Controller E Series External I-O Manual PDFXanti Zabala Da RosaNo ratings yet
- Nachi Robot Catalog 2008Document10 pagesNachi Robot Catalog 2008Xanti Zabala Da RosaNo ratings yet
- Nachi Robot Catalog 2017Document36 pagesNachi Robot Catalog 2017Xanti Zabala Da RosaNo ratings yet
- Nachi Robot Catalog 2012Document20 pagesNachi Robot Catalog 2012Xanti Zabala Da RosaNo ratings yet
- LP 01 AX20 Standard SpecificationsDocument20 pagesLP 01 AX20 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- E Series Installation and Connection ManualDocument114 pagesE Series Installation and Connection ManualXanti Zabala Da RosaNo ratings yet
- 7-axis flexible robot arm with IP67 ratingDocument2 pages7-axis flexible robot arm with IP67 ratingXanti Zabala Da RosaNo ratings yet
- Cleanroom CR7 E 06.2015Document2 pagesCleanroom CR7 E 06.2015Xanti Zabala Da RosaNo ratings yet
- Nachi Robot Catalog 2008Document10 pagesNachi Robot Catalog 2008Xanti Zabala Da RosaNo ratings yet
- Ssraen 071 006 - Sra H 01 FD11Document30 pagesSsraen 071 006 - Sra H 01 FD11Eddy AlmeidaNo ratings yet
- EZ03-02 Standard SpecificationsDocument28 pagesEZ03-02 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- Servo Weld Guns - CXR TYPE: 2M MTBF 100% BodyshopDocument2 pagesServo Weld Guns - CXR TYPE: 2M MTBF 100% BodyshopEddie ScarpaNo ratings yet
- SRA166 210 01A BrochureDocument2 pagesSRA166 210 01A BrochureXanti Zabala Da RosaNo ratings yet
- SRA100H-SRA133HL Rev2 BrochureDocument2 pagesSRA100H-SRA133HL Rev2 BrochureXanti Zabala Da RosaNo ratings yet
- SRA166 210 BrochureDocument2 pagesSRA166 210 BrochureXanti Zabala Da RosaNo ratings yet
- LP 01 AX20 Standard SpecificationsDocument20 pagesLP 01 AX20 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- 500 KG Payload Capacity For Optimal Handling of Large and Heavy LoadsDocument2 pages500 KG Payload Capacity For Optimal Handling of Large and Heavy LoadsXanti Zabala Da RosaNo ratings yet
- 7-axis flexible robot arm with IP67 ratingDocument2 pages7-axis flexible robot arm with IP67 ratingXanti Zabala Da RosaNo ratings yet
- Lesson Plan for Satellite Communication CourseDocument3 pagesLesson Plan for Satellite Communication CourseBindia HandaNo ratings yet
- Acon (Polymer Thru-Hole) RF SeriesDocument3 pagesAcon (Polymer Thru-Hole) RF SeriesfiilckyzkurvenyNo ratings yet
- 1C-XLPE Cable SpecificationDocument2 pages1C-XLPE Cable Specification1382aceNo ratings yet
- 6-Pin Wire Harness Assembly Installation GuideDocument2 pages6-Pin Wire Harness Assembly Installation Guidelucian stoianofNo ratings yet
- Harvest VFD Application On Boiler Feed Water PumpDocument5 pagesHarvest VFD Application On Boiler Feed Water PumpArini RizalNo ratings yet
- Self Balancing Robot Using PidDocument21 pagesSelf Balancing Robot Using Pidline follower robotNo ratings yet
- IITB EE NewDocument1 pageIITB EE NewPLAY LYRICSNo ratings yet
- Dungs Mpa22Document112 pagesDungs Mpa22Piotr MNo ratings yet
- dt109 01Document2 pagesdt109 01Mihai PetrescuNo ratings yet
- GEA Cassette-Geko DF KSDocument64 pagesGEA Cassette-Geko DF KSCatalin FrincuNo ratings yet
- Module 3Document13 pagesModule 3Sarman TamilselvanNo ratings yet
- 7 1 2 Valerio - LippariniDocument35 pages7 1 2 Valerio - LippariniDILLIBABU ENo ratings yet
- Catalog Hoap 2Document0 pagesCatalog Hoap 2jiji1183No ratings yet
- Difference Between IIR and FIR FiltersDocument2 pagesDifference Between IIR and FIR FiltersSaroj TimsinaNo ratings yet
- Line Fs PN Sap PN Description Priority Need Qty: PSU+SV 10003637 SF10000040881 Inductor Assy Coupled 5 / 2-6 286 #1Document6 pagesLine Fs PN Sap PN Description Priority Need Qty: PSU+SV 10003637 SF10000040881 Inductor Assy Coupled 5 / 2-6 286 #1huynh thi y viNo ratings yet
- Thomson Roc 3205Document24 pagesThomson Roc 3205Hrvatski strelicarski savezNo ratings yet
- TS200 Operation Manual - NewDocument9 pagesTS200 Operation Manual - NewJeffriNo ratings yet
- Transfomer ParametersDocument4 pagesTransfomer ParametersSadia Sultana Likhan0% (1)
- SAIC-P-3017 Rev 7 FinalDocument14 pagesSAIC-P-3017 Rev 7 FinalEnginerShahzadGhaffarNo ratings yet
- 16 FDocument10 pages16 Fbebeto90No ratings yet
- Catalogo RADocument132 pagesCatalogo RAjose alejandro peñaranda chiaNo ratings yet
- Tec1 12704Document4 pagesTec1 12704vandersonflNo ratings yet
- Parts List From Pacific SemicondutorsDocument7 pagesParts List From Pacific SemicondutorsNeville McBeanNo ratings yet
- CPH Micro Project PDFDocument10 pagesCPH Micro Project PDFAbhay PotdarNo ratings yet
- Konica Minolta QMS Pagepro 9100 Service ManualDocument228 pagesKonica Minolta QMS Pagepro 9100 Service Manualingmar_sNo ratings yet
- 2.electical Line Protection Based On Circuit BreakerDocument3 pages2.electical Line Protection Based On Circuit BreakerdileeppatraNo ratings yet
- Digital Compass using CMPS03 ModuleDocument7 pagesDigital Compass using CMPS03 ModuleJuita JunidNo ratings yet
- DSP45 12aDocument5 pagesDSP45 12aDaniel BarbuNo ratings yet
- Safety Manual Locator GuideDocument34 pagesSafety Manual Locator Guidemfj796075550% (1)