You might also like
- Trabajo PracticoDocument5 pagesTrabajo PracticoAndrea50% (4)
- Carta Descriptiva DreavaDocument29 pagesCarta Descriptiva DreavaJose Maria Zepeda FlorianNo ratings yet
- Métodos InstrumentalesDocument7 pagesMétodos InstrumentalesMisael VenturaNo ratings yet
- Los Ácidos Grasos TablaDocument3 pagesLos Ácidos Grasos TablaMisael Ventura100% (1)
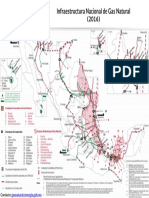
- 511.DGGNP - DGS.109.16.OT.07 Mapa Infraestructura Nacional de Gas Natural 2016 Institucional PDFDocument1 page511.DGGNP - DGS.109.16.OT.07 Mapa Infraestructura Nacional de Gas Natural 2016 Institucional PDFMisael VenturaNo ratings yet
- Complejo Morelos PDFDocument7 pagesComplejo Morelos PDFMisael VenturaNo ratings yet
- La Comunicacion Oral y Escrita en El Nivel SuperiorDocument3 pagesLa Comunicacion Oral y Escrita en El Nivel SuperiorJosué GabrielNo ratings yet
- 3 Preguntas Proc - De.invetDocument3 pages3 Preguntas Proc - De.invetAnakaren MauleonNo ratings yet
- Educación Continua Del Contador PúblicoDocument2 pagesEducación Continua Del Contador PúblicoEliecer Campos CárdenasNo ratings yet
- PPJ-2002 Métodos e Instrumentos Normativos en La Planificación y Diseño Del PaisajeDocument13 pagesPPJ-2002 Métodos e Instrumentos Normativos en La Planificación y Diseño Del PaisajeHector Jesus MejiaNo ratings yet
- Examen TEMA 2 - Comunicación Humana - Jesus Estrada RodriguezDocument2 pagesExamen TEMA 2 - Comunicación Humana - Jesus Estrada RodriguezJesús EstradaNo ratings yet
- Dimensión CognitivaDocument11 pagesDimensión CognitivaFhara IguaranNo ratings yet
- Taller de Carl Rogers y Albert BanduraDocument4 pagesTaller de Carl Rogers y Albert BanduraWendy ZapataNo ratings yet
- GFPI-F-135 Guía de Aprendizaje 2Document10 pagesGFPI-F-135 Guía de Aprendizaje 2Jorge Mario Petro MosqueraNo ratings yet
- 2-Taller1 Present PerfectDocument10 pages2-Taller1 Present PerfectjokasodeNo ratings yet
- Mat 1° - Sesión 21 SetimebreDocument7 pagesMat 1° - Sesión 21 SetimebreMagdalena Guzman MoralesNo ratings yet
- Introducción A La Enseñanza Del Español IIDocument18 pagesIntroducción A La Enseñanza Del Español IIpakotex100% (2)
- Jornada 1Document11 pagesJornada 1Ingrid AndradeNo ratings yet
- Cartill Teorías ContemporáneasDocument10 pagesCartill Teorías ContemporáneasKelly IbarguenNo ratings yet
- Practica de Entrevista ClinicaDocument55 pagesPractica de Entrevista ClinicaeparajonNo ratings yet
- Modelo de Informe DescriptivoDocument7 pagesModelo de Informe DescriptivoainoalejandraNo ratings yet
- Tarea Scribd-Relaciones InterpersonalesDocument1 pageTarea Scribd-Relaciones Interpersonalesconsuelo_uladech6494100% (3)
- 2do Ept Unidad1 s1Document2 pages2do Ept Unidad1 s1Omar Lucas MuñozNo ratings yet
- Inteligencias MultiplesssssDocument6 pagesInteligencias MultiplesssssCaroline Corali Santamaria SantamariaNo ratings yet
- 4° Sesión de Aprendizaje Sesion 4-Sem.2-Exp.1-ComDocument8 pages4° Sesión de Aprendizaje Sesion 4-Sem.2-Exp.1-ComjsanchezlopNo ratings yet
- Mes de NoviembreDocument36 pagesMes de NoviembreAlym Maya MeAchNo ratings yet
- Formato Diplomado Proyecto 2019 - Marco ConceptualDocument3 pagesFormato Diplomado Proyecto 2019 - Marco ConceptualSandra BacaNo ratings yet
- Perfiles de PuestoDocument5 pagesPerfiles de PuestoCarlos Jhair Perez BravoNo ratings yet
- Juego Del Sube y BajaDocument2 pagesJuego Del Sube y BajaEdith TeránNo ratings yet
- Trabajo Corto No 6 Actividades Del Área de Recurso Humanos TA1-2018Document4 pagesTrabajo Corto No 6 Actividades Del Área de Recurso Humanos TA1-2018OlmanNo ratings yet
- Generalidades Del PAEDocument4 pagesGeneralidades Del PAEAnyie RivasNo ratings yet
- Plan de Acción Colaborativo JoseDocument4 pagesPlan de Acción Colaborativo JoseJose AquinoNo ratings yet
- PSI00945 - EV. PARCIAL INFORME PSICOLOG EN PSICOLOGÍA EDUCATIVA - NARAZA - 2021-I FinaDocument4 pagesPSI00945 - EV. PARCIAL INFORME PSICOLOG EN PSICOLOGÍA EDUCATIVA - NARAZA - 2021-I FinaSergio Cano LujanNo ratings yet
- Herramientas para La Vida y Base Comun de AprendizajesDocument13 pagesHerramientas para La Vida y Base Comun de AprendizajesEducacionPertinencia75% (4)