You might also like
- Sensores de Posición TPS - GONZALESDocument11 pagesSensores de Posición TPS - GONZALESMateo Hernandez GutierrezNo ratings yet
- Clasificacion de Los SensoresDocument5 pagesClasificacion de Los SensoresJose Luis VillacrésNo ratings yet
- Simbología eléctrica automotrizDocument12 pagesSimbología eléctrica automotrizFernando Recalde100% (1)
- Como Medir Sensores y Actuadores 2Document17 pagesComo Medir Sensores y Actuadores 2Pantera CowboyNo ratings yet
- Map MafDocument105 pagesMap Mafmaxsuel yoshimar100% (1)
- Funcionamiento de Sistema de Alta Presion de CombustibleDocument2 pagesFuncionamiento de Sistema de Alta Presion de Combustibleseba6487No ratings yet
- Proyecto Electro VentiladorDocument6 pagesProyecto Electro VentiladorKendo MountainousNo ratings yet
- Sensor de RecorridoDocument11 pagesSensor de Recorridokarol100% (2)
- Lineas CAN BUSDocument5 pagesLineas CAN BUSFernando Pigazos MotaNo ratings yet
- SensoresDocument29 pagesSensoresMatiasNo ratings yet
- Las Resistencias Pull-UpDocument3 pagesLas Resistencias Pull-UpANDRES FELIPE VERGARA VARELANo ratings yet
- Programacion de Modulos Byc Ver 1.0 20170927Document61 pagesProgramacion de Modulos Byc Ver 1.0 20170927Brayan Camilo Luque CastilloNo ratings yet
- Manual de Instalacion SyrusDocument5 pagesManual de Instalacion Syrusluxxxito4314No ratings yet
- Funciones y mediciones de sensores y actuadores automotricesDocument15 pagesFunciones y mediciones de sensores y actuadores automotricesRoxana GodoyNo ratings yet
- Sensor APPDocument9 pagesSensor APPLuis Trujillo CadenaNo ratings yet
- Actuadores AutomotricesDocument7 pagesActuadores AutomotricesAngel RodriguezNo ratings yet
- SensoresDocument18 pagesSensoresMarino Torres VilchezNo ratings yet
- Formato Taller-Electronica Basica y ObdiiDocument39 pagesFormato Taller-Electronica Basica y ObdiiMiguel CruzNo ratings yet
- Gestión Electrónica DieselDocument20 pagesGestión Electrónica DieselJames FreemanNo ratings yet
- Actuadores automotricesDocument7 pagesActuadores automotricesErick Andia0% (1)
- Sensor rpm y efecto Hall funcionamientoDocument1 pageSensor rpm y efecto Hall funcionamientoMarcelo Diesel100% (1)
- 3guía N°3 Alternador - 2018Document24 pages3guía N°3 Alternador - 2018Jose Carlos Quispe RanillaNo ratings yet
- Sensor ECTDocument3 pagesSensor ECTostherlingNo ratings yet
- Qué Es La ECUDocument6 pagesQué Es La ECUAbi BasualdoNo ratings yet
- 1.-Nombres y Siglas - Sensores y ActuadoresDocument4 pages1.-Nombres y Siglas - Sensores y ActuadoresGerman ErazoNo ratings yet
- Combustión incompleta, sistemas de inyección y protocolos de diagnóstico diéselDocument24 pagesCombustión incompleta, sistemas de inyección y protocolos de diagnóstico diéselMilton EncaladaNo ratings yet
- CAN-Bus PresentaciónDocument2 pagesCAN-Bus PresentaciónHIMNo ratings yet
- Sensor EGRDocument5 pagesSensor EGRJohn HassNo ratings yet
- Acelerador Por Cable Electrico PDFDocument9 pagesAcelerador Por Cable Electrico PDFOscar CarbajalNo ratings yet
- ALARMA Megalarm 818Document1 pageALARMA Megalarm 818Williams MedinaNo ratings yet
- Common Rail Solucion de ProblemasDocument6 pagesCommon Rail Solucion de ProblemasVictor Garcia VillegasNo ratings yet
- Diagnóstico y mantenimiento del sensor MAFDocument4 pagesDiagnóstico y mantenimiento del sensor MAFDiego SilvaNo ratings yet
- Sensores y ActuadoresDocument100 pagesSensores y ActuadoresPatricio VillalónNo ratings yet
- Tratado de Electrónica Automotriz Básica - Volumen III - FUNCIONAMIENTO de SENSORESDocument63 pagesTratado de Electrónica Automotriz Básica - Volumen III - FUNCIONAMIENTO de SENSORESJorge Dos SantosNo ratings yet
- Curso de Electricidad Del Automovil, SimbologiaDocument10 pagesCurso de Electricidad Del Automovil, SimbologiaDiego Julian Baez ValderramaNo ratings yet
- Sistema de carga y arranque del automóvilDocument11 pagesSistema de carga y arranque del automóvilEduardo HernándezNo ratings yet
- ALTERNADORDocument4 pagesALTERNADORJose Felix TuñoqueNo ratings yet
- Actuador TacDocument5 pagesActuador Tacjose fisdelNo ratings yet
- Funciones y Valvulas de Control de FlujoDocument33 pagesFunciones y Valvulas de Control de FlujoAvelino SantiagoNo ratings yet
- Evaluación ENE TCI202-completaDocument8 pagesEvaluación ENE TCI202-completaLeonardo Gutierrez100% (1)
- Inyeccion Electronica.Document30 pagesInyeccion Electronica.martellb16No ratings yet
- AlternadorDocument3 pagesAlternadorSebas Bedoya100% (1)
- Simbologia y CircuitosDocument21 pagesSimbologia y Circuitosgarysmann100% (1)
- EA2 Circuito de Estacionamiento y DireccionalesDocument16 pagesEA2 Circuito de Estacionamiento y DireccionalesJorge MorochoNo ratings yet
- 12V A 5VDocument4 pages12V A 5VoscarNo ratings yet
- Exposicion Modulos de Control ElectronicoDocument16 pagesExposicion Modulos de Control ElectronicoJefferson BenavidesNo ratings yet
- Sistema de Inyeccion GasolinaDocument23 pagesSistema de Inyeccion GasolinaStalyn Nieto100% (1)
- Probador de aceleración con 555Document1 pageProbador de aceleración con 555Anonymous f6yup1No ratings yet
- Bobina de encendido: definición, partes y funcionamientoDocument20 pagesBobina de encendido: definición, partes y funcionamientoAbrahan LopezNo ratings yet
- Sensores SiglasDocument2 pagesSensores SiglasRonnyNo ratings yet
- Tipos de Resistencia, Sensor Posición Mariposa, Caudalímetro Aleta y Sensor Posición Acelerador. (Castellanos Huerta)Document5 pagesTipos de Resistencia, Sensor Posición Mariposa, Caudalímetro Aleta y Sensor Posición Acelerador. (Castellanos Huerta)Francia LissetNo ratings yet
- Caja de TransmisionDocument54 pagesCaja de TransmisionEnzo Miguel Sarabia MontesNo ratings yet
- Inyección Inacap 1Document17 pagesInyección Inacap 1Carlos Javier Olivarez ValenzuelaNo ratings yet
- Laboratorio de Sensores Practica 2Document10 pagesLaboratorio de Sensores Practica 2Jesus Alberto Ramos OrtizNo ratings yet
- Fase 2 Bloques de Sistemas de Instrumentacion.Document12 pagesFase 2 Bloques de Sistemas de Instrumentacion.Richar GomezNo ratings yet
- Transmisores. Transductores. Señales Clase 9Document18 pagesTransmisores. Transductores. Señales Clase 9jordan.torres.ayalaNo ratings yet
- Sistemas de MedicionDocument18 pagesSistemas de MedicionAna SantanaNo ratings yet
- Tema - Dispositivos de Entradas AnalogicosDocument14 pagesTema - Dispositivos de Entradas AnalogicosEdo TenseiNo ratings yet
- Metrologia Industrial IngDocument21 pagesMetrologia Industrial IngTomás CamposNo ratings yet
- Acondicionamiento de SeñalesDocument18 pagesAcondicionamiento de SeñalesORLANDO RODRIGUEZNo ratings yet
- PrivatizationDocument7 pagesPrivatizationJoseNo ratings yet
- Analisis Comparativo MetodologiasDocument9 pagesAnalisis Comparativo MetodologiasJoseNo ratings yet
- Clasificación de La MercadotecniaDocument2 pagesClasificación de La MercadotecniaJoseNo ratings yet
- Cuestiones Problemas RedoxDocument43 pagesCuestiones Problemas Redoxrodolfob23No ratings yet
- Enunciados Ejercicios RedoxDocument9 pagesEnunciados Ejercicios RedoxJosé Antonio García-Olveros GonzálezNo ratings yet
- Eadm U3 A3 IvrgDocument6 pagesEadm U3 A3 IvrgEscuela Melchor OcampoNo ratings yet
- Presentación Diapositivas Proceso Gestión DocumentalDocument22 pagesPresentación Diapositivas Proceso Gestión DocumentalJuan De Jesus MontenegroNo ratings yet
- Contaminacion IonicaDocument19 pagesContaminacion IonicawilmherNo ratings yet
- Caso Analisis - Proyecto Cadena de Ferreterias.Document23 pagesCaso Analisis - Proyecto Cadena de Ferreterias.Anonymous nHyQHswk100% (1)
- TABLA INFRACCIONES ORDENANZA MUNICIPAL 1534 (El Peruano)Document2 pagesTABLA INFRACCIONES ORDENANZA MUNICIPAL 1534 (El Peruano)Christian André Sandoval75% (12)
- Por Que Debemos Estudiar La PolíticaDocument11 pagesPor Que Debemos Estudiar La PolíticaJhesus Garcia75% (4)
- Guia para La Entrega de Dispositivos A Estudiantes. Nov. 2020Document8 pagesGuia para La Entrega de Dispositivos A Estudiantes. Nov. 2020Arturo JimenesNo ratings yet
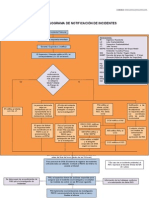
- Flujograma Notificación IncidentesDocument1 pageFlujograma Notificación IncidentesMiguel Soto EspinozaNo ratings yet
- Modelo de Informe Ensayo CBRDocument8 pagesModelo de Informe Ensayo CBRChristian DiazNo ratings yet
- Casos de Uso TextualesDocument16 pagesCasos de Uso TextualesJesús Juan San MartínNo ratings yet
- Circutor Catálogo 2020-EsDocument176 pagesCircutor Catálogo 2020-EsVEMATELNo ratings yet
- Accesorios de La Tubería de RevestimientoDocument15 pagesAccesorios de La Tubería de Revestimientojohnrofa100% (1)
- Levitación MagnéticaDocument3 pagesLevitación MagnéticaGraciela RomeroNo ratings yet
- Concesiones energía zonas no interconectadasDocument13 pagesConcesiones energía zonas no interconectadasjracolombiaNo ratings yet
- Conceptos Básicos de La Auditoría TributariaDocument24 pagesConceptos Básicos de La Auditoría Tributariamirko javier morales calderonNo ratings yet
- Resolucion 2190 de 1991Document7 pagesResolucion 2190 de 1991Felipe HoyosNo ratings yet
- Ambush Alley ESPDocument80 pagesAmbush Alley ESPCristian BotozisNo ratings yet
- Ferrerias HSJDocument52 pagesFerrerias HSJMARIA GOMEZNo ratings yet
- Ing. Civil 2020Document9 pagesIng. Civil 2020AO RomanoNo ratings yet
- Industria Del Vidrio en EspañaDocument3 pagesIndustria Del Vidrio en Españakaledy30No ratings yet
- Contabilidad II tarea #4 mapa mental y ejercicios P7-25A y P7-26ADocument2 pagesContabilidad II tarea #4 mapa mental y ejercicios P7-25A y P7-26AOdalis HernandezNo ratings yet
- Normativas e instalaciones residencialesDocument5 pagesNormativas e instalaciones residencialesJeison David CamposNo ratings yet
- Tratamiento de Aguas Residuales Domesticas Mediante Humedales Artificiales Con La Especie Cyperus AlternifoliusDocument2 pagesTratamiento de Aguas Residuales Domesticas Mediante Humedales Artificiales Con La Especie Cyperus AlternifoliusELMERNo ratings yet
- Crear Controles en Tiempo de EjecucionDocument2 pagesCrear Controles en Tiempo de EjecucionelidatoNo ratings yet
- ModbusDocument17 pagesModbusGonzalo Tapia100% (1)
- 1 - Una Breve Historia de Internet (Primera Parte)Document7 pages1 - Una Breve Historia de Internet (Primera Parte)Iván PortilloNo ratings yet
- Estaciones de Bombeo y Lineas de ImpulcionDocument24 pagesEstaciones de Bombeo y Lineas de ImpulcionBryan BarzalloNo ratings yet
- Reglamento protección incendiosDocument73 pagesReglamento protección incendiosRamon Farre0% (1)
- Agua en Las EdificacionesDocument32 pagesAgua en Las Edificacioneslukassk1No ratings yet
- CurpDocument1 pageCurpROBERTO GarcíaNo ratings yet