You might also like
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Globle WarmingDocument87 pagesGloble WarmingVijay Maurya100% (1)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Jurnal Symposium Lisat Agus Ismangil 2015Document6 pagesJurnal Symposium Lisat Agus Ismangil 2015a_ismangil_physicsNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- IntroductionDocument11 pagesIntroductionImdad JalaliNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Physics homework guideDocument3 pagesPhysics homework guideRahul ChandraNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Heat Exchanger Design Lecture - 07Document24 pagesHeat Exchanger Design Lecture - 07Mohmmad ShaikhNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Storage of Bulk Solids Lec On 23-08-2021Document17 pagesStorage of Bulk Solids Lec On 23-08-2021Subhajit BagNo ratings yet
- Catálogo PCV-9614 MR98H - SC150212Document40 pagesCatálogo PCV-9614 MR98H - SC150212Marcos PauloNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
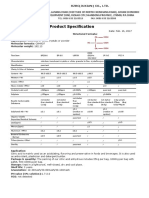
- 2017 - Product Specification - RZBC (JUXIAN) - CAADocument1 page2017 - Product Specification - RZBC (JUXIAN) - CAAediasianagri100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Role of Pesticide Formulations For Sustainable Crop Protection and Environment Management: A ReviewDocument8 pagesRole of Pesticide Formulations For Sustainable Crop Protection and Environment Management: A ReviewYASHICA VAITTIANATHANNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Cekaman AirDocument4 pagesCekaman AirSaifur RidhalNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Fire Resistant Fluid Study on Deterioration of Physicochemical PropertiesDocument34 pagesFire Resistant Fluid Study on Deterioration of Physicochemical Propertiesgolden430No ratings yet
- Day 2-5 Dynamic Response of Tall BuildingsDocument41 pagesDay 2-5 Dynamic Response of Tall BuildingsMIHDI PALAPUZ100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Error Analysis Physics PDFDocument2 pagesError Analysis Physics PDFZory100% (1)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- 31.2-General Wave Popeties-Cie Igcse Physics Ext-Theory-QpDocument12 pages31.2-General Wave Popeties-Cie Igcse Physics Ext-Theory-Qpnityam bajajNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Scarlett .. - .: "An Introduction To Printed Circuit Board Technology"Document8 pagesScarlett .. - .: "An Introduction To Printed Circuit Board Technology"امين الدينNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Newtons Laws With Good PicturesDocument30 pagesNewtons Laws With Good PicturesMohammed RiyazuddinNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Free Damped VibrationsDocument7 pagesFree Damped VibrationsYob YnnosNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Limus: The Best Urea Protection For Optimal Plant NutritionDocument2 pagesLimus: The Best Urea Protection For Optimal Plant NutritionRick RasenbergNo ratings yet
- Agbo 2023 IOP Conf. Ser. Earth Environ. Sci. 1178 012019Document10 pagesAgbo 2023 IOP Conf. Ser. Earth Environ. Sci. 1178 012019Agbo sundayNo ratings yet
- Mark Scheme (Results) January 2022Document22 pagesMark Scheme (Results) January 2022Rose RamisaNo ratings yet
- 08ch1013 Anik Roy Iit KGP Mckinsey ResumeDocument2 pages08ch1013 Anik Roy Iit KGP Mckinsey ResumeAnik RoyNo ratings yet
- Opto Semi Koth0001eDocument17 pagesOpto Semi Koth0001eAnurag ChadhaNo ratings yet
- Soil Erosion in the PhilippinesDocument51 pagesSoil Erosion in the PhilippinesSHARON MANUELNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Fluid Mechanics - Multiple Choice Questions and Answers (MCQ) - ScholarexpressDocument4 pagesFluid Mechanics - Multiple Choice Questions and Answers (MCQ) - Scholarexpressnitesh_kumar079976No ratings yet
- Concrete Aggregates: Standard Specification ForDocument15 pagesConcrete Aggregates: Standard Specification ForHasanalmahmudNo ratings yet
- Compact Conductor CalculationDocument3 pagesCompact Conductor CalculationGautama Chandra PradiptaNo ratings yet
- Anlage C DQC III-18 La DQC IV-18 LaDocument5 pagesAnlage C DQC III-18 La DQC IV-18 LaPEDRONo ratings yet
- 3 - Gravimetric Analysis of Calcium and Hard Water - S PDFDocument6 pages3 - Gravimetric Analysis of Calcium and Hard Water - S PDFJon CranNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Chaper 2 Definition Classification Force SEDocument8 pagesChaper 2 Definition Classification Force SEMaan Valencia - RevillaNo ratings yet
- Maharaja Agrasen Vidyalaya: Viscosity of FluidDocument18 pagesMaharaja Agrasen Vidyalaya: Viscosity of FluidAagam ShahNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)