You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Start: Drafting of Retrofitting PlanDocument1 pageStart: Drafting of Retrofitting PlanSarah HarunNo ratings yet
- Failure Analysis AssignmentDocument1 pageFailure Analysis AssignmentSarah HarunNo ratings yet
- Materials Requirements PlanningDocument1 pageMaterials Requirements PlanningSarah HarunNo ratings yet
- in This Project, The Main Aim Is To Transform The Furniture To Be More Creative, Innovative and Productive. - The Furniture That WilDocument1 pagein This Project, The Main Aim Is To Transform The Furniture To Be More Creative, Innovative and Productive. - The Furniture That WilSarah HarunNo ratings yet
- Project DescriptionDocument1 pageProject DescriptionSarah HarunNo ratings yet
- Checklist Assignment 3-DesignDocument3 pagesChecklist Assignment 3-DesignSarah HarunNo ratings yet
- International Rapid Chess Championship 2017: Ya Allah Ya Karim Ya WadudDocument1 pageInternational Rapid Chess Championship 2017: Ya Allah Ya Karim Ya WadudSarah HarunNo ratings yet
- Step 1: Firstly, Select The MaterialDocument8 pagesStep 1: Firstly, Select The MaterialSarah HarunNo ratings yet
- Project Description Multi-Purpose ChairDocument1 pageProject Description Multi-Purpose ChairSarah HarunNo ratings yet
- Material Max Stress Due To Car Weight Max Displacement Due To Car Weight Max Stress Due To Radial Force Max Displacement Due To Radial ForceDocument2 pagesMaterial Max Stress Due To Car Weight Max Displacement Due To Car Weight Max Stress Due To Radial Force Max Displacement Due To Radial ForceSarah HarunNo ratings yet
- Attachment 2 FinalExam S1'2016SETADocument4 pagesAttachment 2 FinalExam S1'2016SETASarah HarunNo ratings yet
- Experiment 1Document15 pagesExperiment 1Sarah HarunNo ratings yet
- Young Executive SegmentDocument24 pagesYoung Executive SegmentSarah HarunNo ratings yet
- Attachment Financial Final ExamS1'14Document3 pagesAttachment Financial Final ExamS1'14Sarah HarunNo ratings yet
- Young Executive SegmentDocument26 pagesYoung Executive SegmentSarah HarunNo ratings yet
- AssignmentDocument4 pagesAssignmentSarah HarunNo ratings yet
- Business Pack IntroDocument20 pagesBusiness Pack IntroSarah HarunNo ratings yet
- RadialDocument2 pagesRadialSarah HarunNo ratings yet
- Lab Report 2Document19 pagesLab Report 2Sarah HarunNo ratings yet
- Lab ReportDocument12 pagesLab ReportSarah HarunNo ratings yet
- Tutorial Compilation - Update 16 Oct 2015Document9 pagesTutorial Compilation - Update 16 Oct 2015Sarah HarunNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Electricity 10thDocument45 pagesElectricity 10thSuryank sharmaNo ratings yet
- Feasibility Study of Diethyl Sulfate ProductionDocument3 pagesFeasibility Study of Diethyl Sulfate ProductionIntratec SolutionsNo ratings yet
- Jerome4 Sample Chap08Document58 pagesJerome4 Sample Chap08Basil Babym100% (7)
- Deed of Assignment CorporateDocument4 pagesDeed of Assignment CorporateEric JayNo ratings yet
- General Financial RulesDocument9 pagesGeneral Financial RulesmskNo ratings yet
- Oem Functional Specifications For DVAS-2810 (810MB) 2.5-Inch Hard Disk Drive With SCSI Interface Rev. (1.0)Document43 pagesOem Functional Specifications For DVAS-2810 (810MB) 2.5-Inch Hard Disk Drive With SCSI Interface Rev. (1.0)Farhad FarajyanNo ratings yet
- D - MMDA vs. Concerned Residents of Manila BayDocument13 pagesD - MMDA vs. Concerned Residents of Manila BayMia VinuyaNo ratings yet
- SEERS Medical ST3566 ManualDocument24 pagesSEERS Medical ST3566 ManualAlexandra JanicNo ratings yet
- (X-09485) XYLENE RECTIFIED Extra Pure (Mix Isomers)Document9 pages(X-09485) XYLENE RECTIFIED Extra Pure (Mix Isomers)Bharath KumarNo ratings yet
- Epidemiologi DialipidemiaDocument5 pagesEpidemiologi DialipidemianurfitrizuhurhurNo ratings yet
- Accomplishment ReportDocument1 pageAccomplishment ReportMaria MiguelNo ratings yet
- Ajp Project (1) MergedDocument22 pagesAjp Project (1) MergedRohit GhoshtekarNo ratings yet
- Notifier AMPS 24 AMPS 24E Addressable Power SupplyDocument44 pagesNotifier AMPS 24 AMPS 24E Addressable Power SupplyMiguel Angel Guzman ReyesNo ratings yet
- A. The Machine's Final Recorded Value Was P1,558,000Document7 pagesA. The Machine's Final Recorded Value Was P1,558,000Tawan VihokratanaNo ratings yet
- SPH4U Assignment - The Wave Nature of LightDocument2 pagesSPH4U Assignment - The Wave Nature of LightMatthew GreesonNo ratings yet
- Reference Template For Feasibility Study of PLTS (English)Document4 pagesReference Template For Feasibility Study of PLTS (English)Herikson TambunanNo ratings yet
- SME-Additional Matter As Per Latest Syllabus Implementation WorkshopDocument14 pagesSME-Additional Matter As Per Latest Syllabus Implementation WorkshopAvijeet BanerjeeNo ratings yet
- Newsletter 289Document10 pagesNewsletter 289Henry CitizenNo ratings yet
- Cancellation of Deed of Conditional SalDocument5 pagesCancellation of Deed of Conditional SalJohn RositoNo ratings yet
- TLE - IA - Carpentry Grades 7-10 CG 04.06.2014Document14 pagesTLE - IA - Carpentry Grades 7-10 CG 04.06.2014RickyJeciel100% (2)
- Binary File MCQ Question Bank For Class 12 - CBSE PythonDocument51 pagesBinary File MCQ Question Bank For Class 12 - CBSE Python09whitedevil90No ratings yet
- Methodical Pointing For Work of Students On Practical EmploymentDocument32 pagesMethodical Pointing For Work of Students On Practical EmploymentVidhu YadavNo ratings yet
- Embedded Systems DesignDocument576 pagesEmbedded Systems Designnad_chadi8816100% (4)
- Amare Yalew: Work Authorization: Green Card HolderDocument3 pagesAmare Yalew: Work Authorization: Green Card HolderrecruiterkkNo ratings yet
- P394 WindActions PDFDocument32 pagesP394 WindActions PDFzhiyiseowNo ratings yet
- Hotel ManagementDocument34 pagesHotel ManagementGurlagan Sher GillNo ratings yet
- Efs151 Parts ManualDocument78 pagesEfs151 Parts ManualRafael VanegasNo ratings yet
- What Caused The Slave Trade Ruth LingardDocument17 pagesWhat Caused The Slave Trade Ruth LingardmahaNo ratings yet
- Professional Regula/on Commission: Clarita C. Maaño, M.DDocument31 pagesProfessional Regula/on Commission: Clarita C. Maaño, M.Dmiguel triggartNo ratings yet
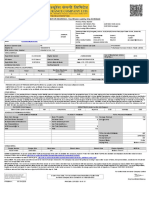
- MOTOR INSURANCE - Two Wheeler Liability Only SCHEDULEDocument1 pageMOTOR INSURANCE - Two Wheeler Liability Only SCHEDULESuhail V VNo ratings yet