You might also like
- Resolução Normativa Aneel #1.000, de 7 de Dezembro de 2021Document262 pagesResolução Normativa Aneel #1.000, de 7 de Dezembro de 2021LeirtonNo ratings yet
- PlacasDocument1 pagePlacasvasconcelosrvNo ratings yet
- Aula HD FsDocument6 pagesAula HD FsvasconcelosrvNo ratings yet
- Aula4 MemóriaDocument1 pageAula4 MemóriavasconcelosrvNo ratings yet
- Modelo Monografia Segundo Grafica Revista EletronicaDocument27 pagesModelo Monografia Segundo Grafica Revista EletronicavasconcelosrvNo ratings yet
- Diretorios LinuxDocument1 pageDiretorios LinuxvasconcelosrvNo ratings yet
- Carregador de BateriaDocument1 pageCarregador de BateriavasconcelosrvNo ratings yet
- Adsl Wifi - .OdpDocument17 pagesAdsl Wifi - .OdpvasconcelosrvNo ratings yet
- Adsl Wifi - OdpDocument15 pagesAdsl Wifi - OdpvasconcelosrvNo ratings yet
- Manual Do MaterialDocument4 pagesManual Do MaterialvasconcelosrvNo ratings yet
- Questõesde Prova HaskellDocument6 pagesQuestõesde Prova HaskellFalber CavalcanteNo ratings yet
- Programação em Linguagem FORTRANDocument46 pagesProgramação em Linguagem FORTRANCaio Henrique FranciscoNo ratings yet
- Lista de Exercícios - AlgoritmosDocument6 pagesLista de Exercícios - Algoritmosadib410% (1)
- 324234324234Document15 pages324234324234Pedro Ivo Camacho SalvadorNo ratings yet
- Apostila Auto Cad MapDocument47 pagesApostila Auto Cad MapEduardo Baptistella EmilianoNo ratings yet
- Álgebra Linear e VetorialDocument4 pagesÁlgebra Linear e VetorialCleber Alves Littig FerreiraNo ratings yet
- Raciocínio LógicoDocument17 pagesRaciocínio LógicoLucas OliveiraNo ratings yet
- Introdução À Análise e Ao Projeto em Elementos Finitos Rev 011Document9 pagesIntrodução À Análise e Ao Projeto em Elementos Finitos Rev 011SERGIO ALMEIDA BOCCHINo ratings yet
- Ebook Avaliacao de Riscos No PGR Sistemaeso Atualizado 2023Document12 pagesEbook Avaliacao de Riscos No PGR Sistemaeso Atualizado 2023Henrique PereiraNo ratings yet
- Lista Determinantes TiradentesDocument6 pagesLista Determinantes TiradentesElementar Aulas ParticularesNo ratings yet
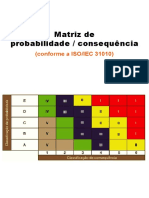
- Matriz de Probabilidade e ConsequênciaDocument7 pagesMatriz de Probabilidade e ConsequênciaFrancesco De Cicco75% (8)
- p1 Controle AulasDocument135 pagesp1 Controle AulasjoaoreniNo ratings yet
- Índices de Exatidão Global, Kappa e TauDocument8 pagesÍndices de Exatidão Global, Kappa e TaucalmitoNo ratings yet
- Apostila - Listas de Exercícios - Matrizes, Determinantes e Sistemas LinearesDocument55 pagesApostila - Listas de Exercícios - Matrizes, Determinantes e Sistemas Linearestiagobrunocepfs07362.comNo ratings yet
- Álgebra Linear Sérgio Luiz ZaniDocument161 pagesÁlgebra Linear Sérgio Luiz Zaniapi-26371057No ratings yet
- Algebra Linear e Aplicacoes Solutions Manual - Gilbert StrangDocument45 pagesAlgebra Linear e Aplicacoes Solutions Manual - Gilbert StrangTrevor Dobbin50% (2)
- LISTA 2 - Seções 1.1 - 1.2 - 1.5 - 2.2 - 2.3Document11 pagesLISTA 2 - Seções 1.1 - 1.2 - 1.5 - 2.2 - 2.3hatilo3696No ratings yet
- Ap 10 Eliminacao de Gauss JordanDocument8 pagesAp 10 Eliminacao de Gauss JordanLeonardo BertatiNo ratings yet
- Preliminares MatemáticosDocument26 pagesPreliminares MatemáticosLucas Cavalcante de AlmeidaNo ratings yet
- AULAMULTIVARIADADocument36 pagesAULAMULTIVARIADADianna LoNo ratings yet
- Aula5 (Matrizes)Document6 pagesAula5 (Matrizes)Carlos RibeiroNo ratings yet
- Autovalores e Autovetores - Definicao e AplicacoesDocument14 pagesAutovalores e Autovetores - Definicao e AplicacoesGuilherme GratonNo ratings yet
- Apostila Cap 1 Circuitos CCDocument51 pagesApostila Cap 1 Circuitos CCnaykeithNo ratings yet
- Algebra CompDocument20 pagesAlgebra CompvidesouzaNo ratings yet
- 20 Exercícios Matrizes Tipos e Igualdade Fixação 29102020Document3 pages20 Exercícios Matrizes Tipos e Igualdade Fixação 29102020Karla FrioNo ratings yet
- Resumo MatlabDocument32 pagesResumo MatlabsssengcivilNo ratings yet
- Matriz - ResumoDocument11 pagesMatriz - Resumoyuri_rodrigues133184No ratings yet
- Lucas M1Document12 pagesLucas M1Flávio SilvaNo ratings yet
- Introd Algebra - Exercicios Resolvidos 2 - Lenimar N AndradeDocument10 pagesIntrod Algebra - Exercicios Resolvidos 2 - Lenimar N AndradeLenimar N Andrade100% (18)
- Matrizes - 2 AnoDocument2 pagesMatrizes - 2 AnofabisregNo ratings yet