You might also like
- Human Object Tracking Using Background Subtraction and Shadow Removal TechniqueDocument5 pagesHuman Object Tracking Using Background Subtraction and Shadow Removal TechniqueAkrit SoinNo ratings yet
- IJETR041390Document7 pagesIJETR041390erpublicationNo ratings yet
- Design and Development of Optical Flow Based Moving Object Detection and Tracking (OMODT) SystemDocument8 pagesDesign and Development of Optical Flow Based Moving Object Detection and Tracking (OMODT) SystemInternational Journal of computational Engineering research (IJCER)No ratings yet
- Eltoukhy Salama ReportDocument22 pagesEltoukhy Salama ReportSaeideh OraeiNo ratings yet
- Fast Animal Detection in Uav Images Using Convolutional Neural NetworksDocument4 pagesFast Animal Detection in Uav Images Using Convolutional Neural NetworksHui ShanNo ratings yet
- Moving Object Tracking in Video Using MATLABDocument5 pagesMoving Object Tracking in Video Using MATLABSumeet SauravNo ratings yet
- Research of Multi-Object Detection and Tracking Using Machine Learning Based On Knowledge For Video Surveillance SystemDocument10 pagesResearch of Multi-Object Detection and Tracking Using Machine Learning Based On Knowledge For Video Surveillance SystemBredino LolerNo ratings yet
- Paper 1Document4 pagesPaper 1RakeshconclaveNo ratings yet
- IJETR021736Document4 pagesIJETR021736erpublicationNo ratings yet
- Detection of Human Motion: Adopting Machine and Deep LearningDocument8 pagesDetection of Human Motion: Adopting Machine and Deep LearningPavithra iyerNo ratings yet
- Detecting Shadows in Quickbird Satellite ImagesDocument6 pagesDetecting Shadows in Quickbird Satellite ImagesMurali ShettyNo ratings yet
- Translucent Shadow MapsDocument6 pagesTranslucent Shadow Maps汪听No ratings yet
- Object TrackDocument5 pagesObject TrackEngr EbiNo ratings yet
- Moving Object Detection For Real-Time ApplicationsDocument6 pagesMoving Object Detection For Real-Time ApplicationsSaeideh OraeiNo ratings yet
- Suma++: Efficient Lidar-Based Semantic SlamDocument8 pagesSuma++: Efficient Lidar-Based Semantic SlamIgnacio VizzoNo ratings yet
- Motion Blur Detection and Removal in ImagesDocument3 pagesMotion Blur Detection and Removal in ImagesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Moving Shadow Detection Based On Stationary WaveleDocument11 pagesMoving Shadow Detection Based On Stationary WaveledestawNo ratings yet
- Event Detection and Analysis from Video StreamsDocument17 pagesEvent Detection and Analysis from Video StreamsadddataNo ratings yet
- A Viewpoint Invariant Approach For Crowd Counting: Dan Kong, Doug Gray and Hai TaoDocument4 pagesA Viewpoint Invariant Approach For Crowd Counting: Dan Kong, Doug Gray and Hai TaoVENNISA VICTORNo ratings yet
- CaiDocument20 pagesCaiFarou BrahimNo ratings yet
- Webcam Motion Detection 2007Document4 pagesWebcam Motion Detection 2007anon-773497No ratings yet
- 369IJCTET2016043006Document5 pages369IJCTET2016043006Koush RastogiNo ratings yet
- Shadow Detection and Removal Using Lab Colors, Morphological Operations and ChromaticityDocument7 pagesShadow Detection and Removal Using Lab Colors, Morphological Operations and ChromaticityEighthSenseGroupNo ratings yet
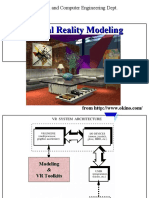
- Virtual Reality ModelingDocument163 pagesVirtual Reality ModelingHari DeivasigamaniNo ratings yet
- Bioinspired Point Cloud RepresentationDocument10 pagesBioinspired Point Cloud Representationjesus_larrazabal_salasNo ratings yet
- Markerless Augmented Reality With A Real-Time Affine Region TrackerDocument10 pagesMarkerless Augmented Reality With A Real-Time Affine Region TrackerJelajah Alam IndonesiaNo ratings yet
- 05401053Document5 pages05401053Vasuhi SamyduraiNo ratings yet
- 2012 FCV UchiyamaDocument8 pages2012 FCV UchiyamaAnonymous JSHUTpNo ratings yet
- Camera Object Tracking Fast AlgorithmDocument7 pagesCamera Object Tracking Fast AlgorithmRadenkovicNo ratings yet
- 3D Object Detection CS230 Project Report: Suvasis Mukherjee Stanford University (Suvasism@stanford - Edu)Document7 pages3D Object Detection CS230 Project Report: Suvasis Mukherjee Stanford University (Suvasism@stanford - Edu)Bảo Nguyễn Hoàng DuyNo ratings yet
- Embedded Features For 1D CNN-based Action Recognition On Depth MapsDocument13 pagesEmbedded Features For 1D CNN-based Action Recognition On Depth Mapsjacekt89No ratings yet
- Real-Time TrackingDocument7 pagesReal-Time TrackinghypermekoolNo ratings yet
- Multiscale Visual Attention Networks For Object Detection in VHR Remote Sensing ImagesDocument5 pagesMultiscale Visual Attention Networks For Object Detection in VHR Remote Sensing ImagesMinh Đinh NhậtNo ratings yet
- 2 - Two Rough UserDocument11 pages2 - Two Rough UserLê TườngNo ratings yet
- (IJET-V1I6P15) Authors: Sadhana Raut, Poonam Rohani, Sumera Shaikh, Tehesin Shikilkar, Mrs. G. J. ChhajedDocument7 pages(IJET-V1I6P15) Authors: Sadhana Raut, Poonam Rohani, Sumera Shaikh, Tehesin Shikilkar, Mrs. G. J. ChhajedInternational Journal of Engineering and TechniquesNo ratings yet
- Ijivp V3 I1 Paper 6 479 484Document6 pagesIjivp V3 I1 Paper 6 479 484V ArunachalamNo ratings yet
- Crowd Behaviours Analysis in Dynamic Visual Scenes of Complex Environment - 2008Document4 pagesCrowd Behaviours Analysis in Dynamic Visual Scenes of Complex Environment - 2008tigerwmlNo ratings yet
- Region Contrast Based Salient Object Detection: Sayali Doifode, Prof.M.B.ZalteDocument3 pagesRegion Contrast Based Salient Object Detection: Sayali Doifode, Prof.M.B.ZalteerpublicationNo ratings yet
- 3D ValuationDocument18 pages3D ValuationPradeep kumarNo ratings yet
- Moving Object DetectionDocument14 pagesMoving Object DetectionAmith Ram Reddy100% (1)
- STEPS IN THE PROCESS FLOW DIAGRAMDocument15 pagesSTEPS IN THE PROCESS FLOW DIAGRAMJanica Rheanne JapsayNo ratings yet
- Motion Estimation For Moving Target DetectionDocument9 pagesMotion Estimation For Moving Target DetectionSatyam ShandilyaNo ratings yet
- Detection and Segmentation of Moving Objects in VideoDocument5 pagesDetection and Segmentation of Moving Objects in Videoeducation babaNo ratings yet
- Longterm Tracking With Online SearchingDocument7 pagesLongterm Tracking With Online SearchingQuang Minh BùiNo ratings yet
- Simulation: Deep learning object recognition for autonomous vehiclesDocument11 pagesSimulation: Deep learning object recognition for autonomous vehiclesDaryAntoNo ratings yet
- pxc387549Document8 pagespxc387549Adisti Nuraprilia prasastiNo ratings yet
- SIFT: Scale Invariant Feature Transform SeminarDocument8 pagesSIFT: Scale Invariant Feature Transform SeminarHemanthkumar TNo ratings yet
- MOMS With Events: Multi-Object Motion Segmentation With Monocular Event CamerasDocument15 pagesMOMS With Events: Multi-Object Motion Segmentation With Monocular Event CamerasSergio Marcelino Trejo FuentesNo ratings yet
- Motion-Based Video Fusion Using Optical Flow InformationDocument8 pagesMotion-Based Video Fusion Using Optical Flow Informationvasece4537577No ratings yet
- Object Motion Detection in Video Frames Using Background Frame MatchingDocument4 pagesObject Motion Detection in Video Frames Using Background Frame MatchingseventhsensegroupNo ratings yet
- Color Feature Based Object Localization in Real Time ImplementationDocument7 pagesColor Feature Based Object Localization in Real Time ImplementationPoitu ErmawantiaNo ratings yet
- Detecting obstacles in foggy environments using dark channel prior and image enhancementDocument4 pagesDetecting obstacles in foggy environments using dark channel prior and image enhancementBalagovind BaluNo ratings yet
- Integrating Visual and Range Data for Robotic Object DetectionDocument12 pagesIntegrating Visual and Range Data for Robotic Object DetectionMahesh MuragNo ratings yet
- Real-Time Crowd Motion Analysis - 2008Document4 pagesReal-Time Crowd Motion Analysis - 2008tigerwmlNo ratings yet
- Digital Image Processing Full ReportDocument4 pagesDigital Image Processing Full ReportLovepreet VirkNo ratings yet
- A Review of Semantic Segmentation Using Deep Neural NetworksDocument7 pagesA Review of Semantic Segmentation Using Deep Neural NetworksMatiur Rahman MinarNo ratings yet
- Exploiting Temporal Coherence in Ray Casted WalkthroughsDocument9 pagesExploiting Temporal Coherence in Ray Casted WalkthroughsHeji ZulkunzNo ratings yet
- (Yu2018) Haze Removal Algorithm Using Color Attenuation Prior and Guided FilterDocument5 pages(Yu2018) Haze Removal Algorithm Using Color Attenuation Prior and Guided FilterK SavitriNo ratings yet
- Motion Detection Using MATLABDocument4 pagesMotion Detection Using MATLABRazvanHaragNo ratings yet
- Ip Control Valve Calibration FormDocument1 pageIp Control Valve Calibration FormKester Ndabai50% (2)
- Ip Gauge Calibration ChecklistDocument1 pageIp Gauge Calibration ChecklistKumarNo ratings yet
- LAB View Training BrochureDocument10 pagesLAB View Training BrochureJatin Ⓥ SarvaiyaNo ratings yet
- HOS & Burner Instrument Calibration DetailsDocument4 pagesHOS & Burner Instrument Calibration DetailsKumarNo ratings yet
- Automated Multistoried Car Parking SystemDocument15 pagesAutomated Multistoried Car Parking SystemKumarNo ratings yet
- Cea - Standard Technical Specification For Main Plant Package (2 500 MW)Document1,011 pagesCea - Standard Technical Specification For Main Plant Package (2 500 MW)vasudevapavanNo ratings yet
- Vibration in TurbineDocument6 pagesVibration in TurbineKumarNo ratings yet
- Ip Gauge Calibration ChecklistDocument1 pageIp Gauge Calibration Checklistbeto_m04No ratings yet
- Technical Interview Questions For Instrumentation EngineeringDocument14 pagesTechnical Interview Questions For Instrumentation EngineeringKumarNo ratings yet
- Otsc - Control Final-BoilerDocument85 pagesOtsc - Control Final-BoilerKumar100% (1)
- Engineering Symbology - Prints and Drawings 1Document120 pagesEngineering Symbology - Prints and Drawings 1Zander_No ratings yet
- ABB - 4 Biggest MistakesDocument7 pagesABB - 4 Biggest MistakesAnargha BhattacharyaNo ratings yet
- MaxDNA TrainingDocument159 pagesMaxDNA Trainingntpckaniha100% (4)
- Consumer Decision Making and Beyond: Consumer Behavior, Ninth EditionDocument44 pagesConsumer Decision Making and Beyond: Consumer Behavior, Ninth EditionZeeshan MunirNo ratings yet
- (Kevin Trudeau) Kevin Trudeau's Mega Memory How PDFDocument368 pages(Kevin Trudeau) Kevin Trudeau's Mega Memory How PDFzazi86% (7)
- English: Quarter 3: Week 6 Learning Activity SheetsDocument8 pagesEnglish: Quarter 3: Week 6 Learning Activity SheetsPhoebe Dayrit CunananNo ratings yet
- Mosada - A Dramatic Poem by W. B. YeatsDocument18 pagesMosada - A Dramatic Poem by W. B. Yeatstriamazikamno100% (1)
- Puzzle Design Challenge: Define The ProblemDocument12 pagesPuzzle Design Challenge: Define The Problemapi-306079911No ratings yet
- PHIL 125: Practical Logic: University of Alberta Sam Hillier, Fall 2013Document12 pagesPHIL 125: Practical Logic: University of Alberta Sam Hillier, Fall 2013Harry WeiNo ratings yet
- Advanced LevelDocument6 pagesAdvanced Level03152788No ratings yet
- The Meaning of Christian ChastityDocument3 pagesThe Meaning of Christian ChastityThe Fatima CenterNo ratings yet
- What Are Smart GoalsDocument12 pagesWhat Are Smart GoalsHong Kok LaiNo ratings yet
- Fundamentals of History & Understanding The DisciplinesDocument8 pagesFundamentals of History & Understanding The DisciplinesGeraldine Mae100% (1)
- Anger Management WorkbookDocument20 pagesAnger Management Workbookelsmore86100% (2)
- Kontekstno-Svesno RacunrastvoDocument25 pagesKontekstno-Svesno RacunrastvomikulaNo ratings yet
- Prepare The Leaders of Tomorrow-Dirigeants-DemainDocument8 pagesPrepare The Leaders of Tomorrow-Dirigeants-Demaintricko89No ratings yet
- Felipe Vs LeuterioDocument4 pagesFelipe Vs LeuterioJoshua McgeeNo ratings yet
- Teaching AptitudeDocument49 pagesTeaching AptitudeganguluriNo ratings yet
- Flouting Maxims in DramaDocument12 pagesFlouting Maxims in DramaSage ModeNo ratings yet
- The Good LifeDocument7 pagesThe Good LifeRosylJoyRituaNo ratings yet
- Ara 383 English-Arabic TranslationDocument97 pagesAra 383 English-Arabic Translationstire der corridaNo ratings yet
- Indian Caste SystemDocument21 pagesIndian Caste SystemSSha100% (1)
- How To Make An Effective PosterDocument54 pagesHow To Make An Effective Posterfanny ayuNo ratings yet
- Barnes - A Suggestion About ValueDocument3 pagesBarnes - A Suggestion About ValueRafaelVogelmannNo ratings yet
- Assignment On Jurisprudence: Guided By: DR - Prof. Eqbal HusainDocument27 pagesAssignment On Jurisprudence: Guided By: DR - Prof. Eqbal HusainNandini TarwayNo ratings yet
- Tata Values and Purpose Guide Business ExcellenceDocument110 pagesTata Values and Purpose Guide Business Excellenceekonextg100% (1)
- AloneDocument24 pagesAloneLawrence ToledoNo ratings yet
- End of Mass CommunicationDocument11 pagesEnd of Mass Communicationaiza khanNo ratings yet
- Employee stress impact on absenteeism at IT firmDocument11 pagesEmployee stress impact on absenteeism at IT firmManjunadh Padala0% (1)
- On The Use of Risk Acceptance Criteria in The Offshore Oil and Gas Industry PDFDocument10 pagesOn The Use of Risk Acceptance Criteria in The Offshore Oil and Gas Industry PDFsaeed-21No ratings yet
- Art Appreciation Likha-Sining For The 21 - Century Filipino StudentsDocument3 pagesArt Appreciation Likha-Sining For The 21 - Century Filipino StudentsJohn Lerry IntiaNo ratings yet
- Albert Rabin - The Szondi TestDocument15 pagesAlbert Rabin - The Szondi Testandreea_niculescu_11No ratings yet
- Maximus and DeificationDocument22 pagesMaximus and DeificationMichael Gibson100% (1)