You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- FFRTC LogDocument2,797 pagesFFRTC LogArya Kumara PrabaswaraNo ratings yet
- Troubleshoot High Cpu On Asr1000 SeriesDocument10 pagesTroubleshoot High Cpu On Asr1000 SeriesSaptarshi BhattacharjeeNo ratings yet
- Datasheet SportsStar Upgrade Version GM PDF PDF Lighting Light EmittingDocument2 pagesDatasheet SportsStar Upgrade Version GM PDF PDF Lighting Light Emittinglay kokoNo ratings yet
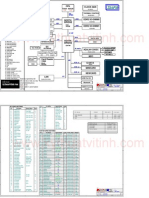
- Asus Z84FMDocument66 pagesAsus Z84FMNicu LiviuNo ratings yet
- Using NSD - A Practical Guide Hands On Track Session HND107 Lotusphere 2008 Presented By: Elliott Harden and Joe WallaceDocument48 pagesUsing NSD - A Practical Guide Hands On Track Session HND107 Lotusphere 2008 Presented By: Elliott Harden and Joe Wallaceporpatham0% (1)
- Modbus Slave Application DatasheetDocument4 pagesModbus Slave Application Datasheetsteam100deg82290% (1)
- MTP3055E: N-CHANNEL 60V - 0.1 - 12A TO-220 Stripfet™ Power MosfetDocument9 pagesMTP3055E: N-CHANNEL 60V - 0.1 - 12A TO-220 Stripfet™ Power MosfetTomass123No ratings yet
- Acer Aspire E1-431Document251 pagesAcer Aspire E1-431Jason Bosland0% (1)
- Siddharth SDocument2 pagesSiddharth SManish BhattNo ratings yet
- Operating System 2 Marks and 16 Marks - AnswersDocument45 pagesOperating System 2 Marks and 16 Marks - AnswersDiana Arun75% (4)
- SQLite Database Connectivity in AndroidDocument7 pagesSQLite Database Connectivity in Androidz4pt3dNo ratings yet
- Murata Lbca2hnzyz 711Document23 pagesMurata Lbca2hnzyz 711dejan_blazekaNo ratings yet
- Manual List For Fanuc Oi D - CompressDocument2 pagesManual List For Fanuc Oi D - CompressMathavan RajamanickamNo ratings yet
- ServiceGuide-Acer Aspire - 4333 PDFDocument168 pagesServiceGuide-Acer Aspire - 4333 PDFRomadicto XVINo ratings yet
- Design and Development of A CubeSat Hardware Architecture With COTS MPSoC Using Radiation Mitigation TechniquesDocument71 pagesDesign and Development of A CubeSat Hardware Architecture With COTS MPSoC Using Radiation Mitigation Techniqueslly1112002No ratings yet
- Introduction Power System StabilityDocument23 pagesIntroduction Power System StabilityDrMithun SarkarNo ratings yet
- Things To Know About EPM 11.1.2.4Document58 pagesThings To Know About EPM 11.1.2.4charan ramanNo ratings yet
- Synology RS406 DataDocument2 pagesSynology RS406 DataPepe Fernandez TapiaNo ratings yet
- Transistor CircuitsDocument9 pagesTransistor CircuitsYogesh YadavNo ratings yet
- PHP Security, Part 2: John CoggeshallDocument5 pagesPHP Security, Part 2: John Coggeshallhungnq1989No ratings yet
- 2700 Series Basic Extensions ManualDocument636 pages2700 Series Basic Extensions ManualHoàng ĐìnhNo ratings yet
- HPE0 S50 DemoDocument5 pagesHPE0 S50 DemoRoman GorbunovNo ratings yet
- China Mobile Unlock Code With PDFDocument5 pagesChina Mobile Unlock Code With PDFhusyn488450% (4)
- Chapter 2 Process ModelsDocument39 pagesChapter 2 Process ModelsHiba Amjad SiddiquiNo ratings yet
- PSU HY-5005 Datasheet enDocument2 pagesPSU HY-5005 Datasheet enDrazen MijacNo ratings yet
- Understanding Operating Systems Sixth EditionDocument47 pagesUnderstanding Operating Systems Sixth EditionBSIT3_IT116No ratings yet
- Job Status ConfigurationDocument7 pagesJob Status ConfigurationanduNo ratings yet
- Clar-Psp-057 Soft MigrationDocument2 pagesClar-Psp-057 Soft MigrationDavid LynxNo ratings yet
- Dbms NotesDocument59 pagesDbms NotesRehan SabirNo ratings yet
- Computerized Examination Management Tool AbstractDocument5 pagesComputerized Examination Management Tool AbstractTelika RamuNo ratings yet