You might also like
- Lecture 12 Image Representation and DescriptionDocument55 pagesLecture 12 Image Representation and DescriptionRayan IsranNo ratings yet
- Image Representation and Description ExplainedDocument48 pagesImage Representation and Description ExplainedSATYAM GUPTANo ratings yet
- Image Representation and Description TechniquesDocument48 pagesImage Representation and Description TechniquesSunnyNo ratings yet
- XRD 1Document47 pagesXRD 1Bakhita MaryamNo ratings yet
- Binary Image Analysis: Skeleton Finding Via Distance TransformDocument43 pagesBinary Image Analysis: Skeleton Finding Via Distance TransformLal ChandNo ratings yet
- Hlavacek Jan, Prochazka Radek, Draxler Karek, Kvasnicka Vladislav. - The Rogowski Coil Design SoftwareDocument6 pagesHlavacek Jan, Prochazka Radek, Draxler Karek, Kvasnicka Vladislav. - The Rogowski Coil Design SoftwareAnonymous OARSwGsNo ratings yet
- Chapter 6 - ContourDocument54 pagesChapter 6 - ContourNam NguyenNo ratings yet
- Image Representationn and DescriptionDocument51 pagesImage Representationn and DescriptionDilufa LaskarNo ratings yet
- Ch5a Boundary DescriptorsDocument30 pagesCh5a Boundary DescriptorsMustafa ElmalkyNo ratings yet
- Lecture 10 - 0Document69 pagesLecture 10 - 0yhjklNo ratings yet
- Fast Sequential Decoding of Polar CodesDocument19 pagesFast Sequential Decoding of Polar CodesBui Van ThanhNo ratings yet
- Physics CSE Sream Model QPDocument4 pagesPhysics CSE Sream Model QPjayanthibalasubramani2No ratings yet
- Alpert 1993Document22 pagesAlpert 1993Julee ShahniNo ratings yet
- Digital Image Processing (Com-3371) : Week 7 - February 25, 2002Document22 pagesDigital Image Processing (Com-3371) : Week 7 - February 25, 2002kiziNo ratings yet
- Convolutional Coding and Viterbi Decoding ExplainedDocument30 pagesConvolutional Coding and Viterbi Decoding ExplainedEmNo ratings yet
- Landauer Buttiker Formalism PDFDocument15 pagesLandauer Buttiker Formalism PDFJacobNo ratings yet
- Solids Structure and AnalysisDocument26 pagesSolids Structure and AnalysisBernard Marvin QuinlatNo ratings yet
- Practical Work 5Document9 pagesPractical Work 5Kalai ShanNo ratings yet
- MA2215 Lecture Notes on Rings, Fields and ModulesDocument35 pagesMA2215 Lecture Notes on Rings, Fields and ModulesRamesh Kumar B LNo ratings yet
- ENSC 424 - Multimedia Communications Engineering: Topic 6: Arithmetic Coding 1Document23 pagesENSC 424 - Multimedia Communications Engineering: Topic 6: Arithmetic Coding 1Fotaf FolaNo ratings yet
- Polar Codes For Error Correction: Analysis and Decoding AlgorithmsDocument77 pagesPolar Codes For Error Correction: Analysis and Decoding AlgorithmsMehmet KibarNo ratings yet
- Model Question - Nano Materilas - Nanoscale Synthesis& CharacterizationDocument3 pagesModel Question - Nano Materilas - Nanoscale Synthesis& CharacterizationMafezur RahamanNo ratings yet
- Final Exam Spectroscopy 2022 23 RepeatDocument17 pagesFinal Exam Spectroscopy 2022 23 RepeatIris BenardeteNo ratings yet
- Outline: - Error Correction Codes (Chapter 8) (Week 10 and 11)Document31 pagesOutline: - Error Correction Codes (Chapter 8) (Week 10 and 11)HarshaNo ratings yet
- Cglibs13 FeaturesDocument26 pagesCglibs13 FeaturesRoverNo ratings yet
- Chap 11Document30 pagesChap 11Sayem HasanNo ratings yet
- The Michelson InterferometerDocument5 pagesThe Michelson InterferometerUmar JttNo ratings yet
- Lec 11Document8 pagesLec 11stathiss11No ratings yet
- Slides ChannelCodingDocument98 pagesSlides ChannelCodingHuongNguyenNo ratings yet
- CHY 124 (Jan 24)Document4 pagesCHY 124 (Jan 24)traptiNo ratings yet
- String Theory Solution Manual PDFDocument67 pagesString Theory Solution Manual PDFkalodijfNo ratings yet
- ITC 6thdec2017Document2 pagesITC 6thdec2017Koush RastogiNo ratings yet
- Digital Image Processing & Computer Vision: Edge DetectionDocument56 pagesDigital Image Processing & Computer Vision: Edge Detectionkparisa05No ratings yet
- MT2008Document2 pagesMT2008RandomNo ratings yet
- Chapter 5Document61 pagesChapter 5Faiz MohdNo ratings yet
- Chapter Linear Block CodesDocument22 pagesChapter Linear Block CodesSafa KhemiriNo ratings yet
- AP621 Lect02 DiffractionDocument117 pagesAP621 Lect02 DiffractionHassanNo ratings yet
- ELECTRONICS AND TELECOMMUNICATION ENGINEERING EXAM 2017Document10 pagesELECTRONICS AND TELECOMMUNICATION ENGINEERING EXAM 2017Vivek ChauhanNo ratings yet
- 1 Convolutional Channel Coding: 1.1 The DiagramDocument9 pages1 Convolutional Channel Coding: 1.1 The Diagramramgopal_1991No ratings yet
- Physics PracticalDocument24 pagesPhysics PracticalAkshit ChauhanNo ratings yet
- Chapter 02 - TTQ 2022ADocument73 pagesChapter 02 - TTQ 2022Ahai NguyenNo ratings yet
- X-Ray Diffraction: To Generate X-Rays, Three Things Are NeededDocument33 pagesX-Ray Diffraction: To Generate X-Rays, Three Things Are Neededyehia ElarefNo ratings yet
- BW, Chs. 15-18, YC, Ch. 9 S, Ch. 14 Outside SourcesDocument59 pagesBW, Chs. 15-18, YC, Ch. 9 S, Ch. 14 Outside SourcesOmar DoskyNo ratings yet
- Double Binary IeeeDocument6 pagesDouble Binary Ieeesrinivas raoNo ratings yet
- Landauer Buttiker Formalism PDFDocument15 pagesLandauer Buttiker Formalism PDFSunilkumar PattnayakNo ratings yet
- Eec 401 Basic Vlsi Design: GitamDocument52 pagesEec 401 Basic Vlsi Design: Gitamcrush on creativityNo ratings yet
- Formats For The Geoid Models: ContentDocument7 pagesFormats For The Geoid Models: ContentVic ValdezNo ratings yet
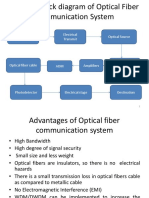
- Optical Fiber Communication System Block DiagramDocument37 pagesOptical Fiber Communication System Block DiagramsubashNo ratings yet
- Binary Shape AnalysisDocument36 pagesBinary Shape AnalysisAnu S SNo ratings yet
- Ee10002 Oct Autumn Mid Sas 23Document3 pagesEe10002 Oct Autumn Mid Sas 23mdabdularain655No ratings yet
- Practical Work 6Document11 pagesPractical Work 6Kalai ShanNo ratings yet
- Homework 3Document2 pagesHomework 3djoseph_1No ratings yet
- SSD Reciprocal Lattice (2023) 0912Document39 pagesSSD Reciprocal Lattice (2023) 0912fmnoori4No ratings yet
- B.E./B.Tech. Degree Examinations RF and Microwave Engineering Question PaperDocument3 pagesB.E./B.Tech. Degree Examinations RF and Microwave Engineering Question PaperAdditive SirpiNo ratings yet
- Shift Selectivity of The Collinear Holographic Storage SystemDocument3 pagesShift Selectivity of The Collinear Holographic Storage SystemChang MingNo ratings yet
- Image_segmentation_IDocument62 pagesImage_segmentation_IHamza MasoodNo ratings yet
- 18 State AssignDocument30 pages18 State AssignSushant MandalNo ratings yet
- DVLSI ESA 2020 Solution (SSR) PDFDocument10 pagesDVLSI ESA 2020 Solution (SSR) PDFM Chandan ShankarNo ratings yet
- Transistor Switching and Sequential CircuitsFrom EverandTransistor Switching and Sequential CircuitsRating: 5 out of 5 stars5/5 (1)
- 11 ReportDocument20 pages11 ReportMaher Khalaf HussienNo ratings yet
- Advanced Computer Architecture: Conditions of ParallelismDocument27 pagesAdvanced Computer Architecture: Conditions of ParallelismMaher Khalaf HussienNo ratings yet
- 3320 Basics of Spread SpectrumDocument34 pages3320 Basics of Spread SpectrumMaher Khalaf HussienNo ratings yet
- Complete Chapter Quiz on CryptographyDocument4 pagesComplete Chapter Quiz on CryptographyMaher Khalaf Hussien0% (1)
- بحث واسترجاع المعلومات 6Document6 pagesبحث واسترجاع المعلومات 6Maher Khalaf HussienNo ratings yet
- Information Theoretic Feature Extraction For Audio-Visual Speech RecognitionDocument12 pagesInformation Theoretic Feature Extraction For Audio-Visual Speech RecognitionMaher Khalaf HussienNo ratings yet
- Features of Wavelet Packet Decomposition and Discrete Wavelet Transform For Malayalam Speech RecognitionDocument4 pagesFeatures of Wavelet Packet Decomposition and Discrete Wavelet Transform For Malayalam Speech RecognitionMaher Khalaf HussienNo ratings yet
- Basic Geometry Concepts and Types of AnglesDocument16 pagesBasic Geometry Concepts and Types of AnglesAldwin Jake SantillanNo ratings yet
- Maths in Daily LifeDocument5 pagesMaths in Daily LifeAdu JainNo ratings yet
- DR - Stika Plus: User's ManualDocument0 pagesDR - Stika Plus: User's ManualUn Poco de TodoNo ratings yet
- Note Taking Made EasyDocument96 pagesNote Taking Made Easyladymaryelaine100% (8)
- Ped3111 Unit - Exploring Measurement in A Winter WonderlandDocument40 pagesPed3111 Unit - Exploring Measurement in A Winter Wonderlandapi-441417409No ratings yet
- Ed 474551Document282 pagesEd 474551MariaNo ratings yet
- LKG Syllabus For CBSEDocument7 pagesLKG Syllabus For CBSEBroadway PublishersNo ratings yet
- AutoCAD 2000 Commands ReferencesDocument7 pagesAutoCAD 2000 Commands ReferencesariostojrNo ratings yet
- Mold Cost EstimationDocument5 pagesMold Cost EstimationPenjahit TedyNo ratings yet
- OS Applied Statistics Level 6Document120 pagesOS Applied Statistics Level 6James KithikiiNo ratings yet
- Classifying QuadrilateralsDocument11 pagesClassifying QuadrilateralsGabriela IonitaNo ratings yet
- Arta Prelim Exam ReviewerDocument7 pagesArta Prelim Exam ReviewerFaithNo ratings yet
- MATH 5-Lesson 63-Q3-Week 3.: Describes and Compares Properties of Polygons (Regular and Irregular Polygons)Document14 pagesMATH 5-Lesson 63-Q3-Week 3.: Describes and Compares Properties of Polygons (Regular and Irregular Polygons)JEZIEL LOVE BALILINo ratings yet
- 3rd Grade Math StandardsDocument12 pages3rd Grade Math Standardsdestiny_eastepNo ratings yet
- Grade R - assessment plan term 2Document3 pagesGrade R - assessment plan term 2Sandrisha GovenderNo ratings yet
- ARTS 7 Quiz ActivityDocument10 pagesARTS 7 Quiz ActivityCDSLNo ratings yet
- Training CST 3Document50 pagesTraining CST 3Trần PhanNo ratings yet
- MM MergedDocument541 pagesMM MergedAkash KumarNo ratings yet
- DOE Fundamentals Handbook Module on GeometryDocument112 pagesDOE Fundamentals Handbook Module on Geometryaji jayaNo ratings yet
- As - Q3 Math 5 Week 3 4Document8 pagesAs - Q3 Math 5 Week 3 4Pinky SubionNo ratings yet
- Engaging MathematicsDocument48 pagesEngaging MathematicsDani ChiriacNo ratings yet
- Assignment in Contemporary Philippine Arts From The RegionDocument2 pagesAssignment in Contemporary Philippine Arts From The RegionJullie SolanoNo ratings yet
- Bridges Page 1 in Mathematics Kindergarten Family Overview Unit 5Document1 pageBridges Page 1 in Mathematics Kindergarten Family Overview Unit 5api-292285340No ratings yet
- My Right Play, Learn and Create: Level OneDocument46 pagesMy Right Play, Learn and Create: Level OneMr-Ibrahem Mahmoud MorsyNo ratings yet
- UG022528 International GCSE in Mathematics Spec B For WebDocument55 pagesUG022528 International GCSE in Mathematics Spec B For WebMohammad SaifNo ratings yet
- Abstract Reasoning Test ExplainedDocument20 pagesAbstract Reasoning Test ExplainedAmiga Mi100% (3)
- Morphometric Tools For Landmark DataDocument455 pagesMorphometric Tools For Landmark Dataalbgomez0% (1)
- Line and Form (1900) - Walter CraneDocument282 pagesLine and Form (1900) - Walter CranemitralieraNo ratings yet
- Kindergarten Unit On ShapesDocument28 pagesKindergarten Unit On Shapesapi-316827673No ratings yet
- The Spiritual Beings in The Heavenly Bodies and in The Kingdoms of NatureDocument100 pagesThe Spiritual Beings in The Heavenly Bodies and in The Kingdoms of Naturekatburner100% (3)