You might also like
- Carrier - Handbook of Air Conditioning System Design (Part 1)Document162 pagesCarrier - Handbook of Air Conditioning System Design (Part 1)Jonathan Castro96% (93)
- MS 1013igDocument30 pagesMS 1013igkristoforos100% (3)
- Load Flow Analysis PDFDocument33 pagesLoad Flow Analysis PDFRakshitha VNo ratings yet
- Transformer Protection 1594577509 PDFDocument63 pagesTransformer Protection 1594577509 PDFAdrián RomeroNo ratings yet
- HV Winding Phase Overcurrent ProtectionDocument5 pagesHV Winding Phase Overcurrent Protection386No ratings yet
- Motor Starting CasestudyDocument2 pagesMotor Starting Casestudykajale_shrikant2325No ratings yet
- Motor Starting - Open ElectricalDocument12 pagesMotor Starting - Open ElectricalHoangNo ratings yet
- Motor Starting Dynamic AccelerationDocument63 pagesMotor Starting Dynamic Accelerationashraf-84No ratings yet
- Overcurrent and Overload Protection Using Protective Relays: Electricity and New EnergyDocument73 pagesOvercurrent and Overload Protection Using Protective Relays: Electricity and New EnergyKaisar PrimaNo ratings yet
- IDMT Relay SettingDocument1 pageIDMT Relay SettingJeya KannanNo ratings yet
- KVMRT MMJV SBK SS05 Sysw Rep PDS 000089Document349 pagesKVMRT MMJV SBK SS05 Sysw Rep PDS 000089syafiqishamuddinNo ratings yet
- Slip Ring PresentationDocument12 pagesSlip Ring PresentationMynampati Sai SrinivasNo ratings yet
- Fe-10 2e-7641-105 Short-Circuit Current CalculationDocument28 pagesFe-10 2e-7641-105 Short-Circuit Current CalculationNarayanaNo ratings yet
- Electrical System Earthing Design Philosophy: Prelude Floating LNG PROJECTDocument28 pagesElectrical System Earthing Design Philosophy: Prelude Floating LNG PROJECTStefano FavaroNo ratings yet
- Medium Voltage Variable Frequency DriveDocument39 pagesMedium Voltage Variable Frequency Drivekajale.shrikantNo ratings yet
- 03 Directional OvercurrentDocument10 pages03 Directional OvercurrentM Kumar MarimuthuNo ratings yet
- 07a Backup OCEF Relay - Tech. Data Check List CompletedDocument6 pages07a Backup OCEF Relay - Tech. Data Check List CompletedAnupam0103No ratings yet
- E02C3112E (Power Socket Terminal Direction and Fixing Methode)Document6 pagesE02C3112E (Power Socket Terminal Direction and Fixing Methode)Heru AwanzNo ratings yet
- Areva P443 Protection by Areva PaperDocument6 pagesAreva P443 Protection by Areva PaperRajesh BoddunaNo ratings yet
- Safelink CB: Gas Insulated Ring Main UnitDocument2 pagesSafelink CB: Gas Insulated Ring Main UnitABCDNo ratings yet
- Aa 02 Short-Circuit Iec StandardDocument58 pagesAa 02 Short-Circuit Iec StandardSupriyanto SuhonoNo ratings yet
- 7SJ61 As High Impedance RelayDocument36 pages7SJ61 As High Impedance Relayzarun1No ratings yet
- Motor ProtectionDocument7 pagesMotor ProtectionAbhijit KumarNo ratings yet
- Relay CoordinationDocument30 pagesRelay CoordinationMohamed MeeranNo ratings yet
- CT Polarity On SIPROTEC Quick StartDocument5 pagesCT Polarity On SIPROTEC Quick StartedgardNo ratings yet
- 11 KV Bay EquipmentDocument22 pages11 KV Bay EquipmentSudhir ShindeNo ratings yet
- 132kv Ss Vestas Test ReportDocument77 pages132kv Ss Vestas Test ReportdaminhvienNo ratings yet
- Difference Between Vacuum Circuit Breaker & Vacuum ContactorDocument2 pagesDifference Between Vacuum Circuit Breaker & Vacuum ContactorMohan K67% (3)
- Tech Con 2011 Kruger New Experience With Diagn Meas On PTDocument15 pagesTech Con 2011 Kruger New Experience With Diagn Meas On PTMichael KrügerNo ratings yet
- 100 STATOR EF P345 With 20HZ INJECTION Apr 09Document6 pages100 STATOR EF P345 With 20HZ INJECTION Apr 09Amaresh NayakNo ratings yet
- 11kV SPBD General TechnicalDocument12 pages11kV SPBD General TechnicalNihar SenapatiNo ratings yet
- CLPS - UAT Protection CT Sizing Calculations Rev ADocument5 pagesCLPS - UAT Protection CT Sizing Calculations Rev ATosikur RahmanNo ratings yet
- GE-Guide To Instantaneous SelectivityDocument19 pagesGE-Guide To Instantaneous SelectivityJOSE LUIS FALCON CHAVEZNo ratings yet
- Earthing Cal - Rev-01 - As Per Mecon Comnt.Document9 pagesEarthing Cal - Rev-01 - As Per Mecon Comnt.Prateek SinghNo ratings yet
- Protection Directional OC & EFDocument54 pagesProtection Directional OC & EFbrijalNo ratings yet
- Ansi CodesDocument6 pagesAnsi CodesAlbert Sekar0% (1)
- Technical Rules For The Assessment of Network Disturbances (HV) 2012Document47 pagesTechnical Rules For The Assessment of Network Disturbances (HV) 2012Fikret VelagicNo ratings yet
- PGCIL ET Salary in Hand, Structure & Allowances - OlxamDocument3 pagesPGCIL ET Salary in Hand, Structure & Allowances - OlxamAravindanNo ratings yet
- 1986-0040-EL-SPE01-0001 RA Specification For Induction MotorsDocument14 pages1986-0040-EL-SPE01-0001 RA Specification For Induction MotorsjmohammadrezaNo ratings yet
- One Case Study-Practical Protection Engineering BasicDocument4 pagesOne Case Study-Practical Protection Engineering BasicarsalanhamidNo ratings yet
- 04 - Transformer SizingDocument19 pages04 - Transformer Sizingashraf-84No ratings yet
- 7714-U0bk8-00 (RD Yl BL BK)Document3 pages7714-U0bk8-00 (RD Yl BL BK)vsswami_82No ratings yet
- Overall Understanding of Voltage Transformer 1683194716Document4 pagesOverall Understanding of Voltage Transformer 1683194716rupali patilNo ratings yet
- Voltage Drop Calculation of 11kV H.V. Motor at Starting: ST STDocument2 pagesVoltage Drop Calculation of 11kV H.V. Motor at Starting: ST STdpkfatnani05No ratings yet
- Single Line To Ground FaultDocument12 pagesSingle Line To Ground Faultluhusapa-1No ratings yet
- Outline ETAP PDFDocument1 pageOutline ETAP PDFSiddarthan AnnamalaiNo ratings yet
- Arc Flash Analysis and Mitigation Solutions - IIEE WCCDocument155 pagesArc Flash Analysis and Mitigation Solutions - IIEE WCCJake LozantaNo ratings yet
- 50smss1 (Specification For Current Transformer Up To 380kv)Document21 pages50smss1 (Specification For Current Transformer Up To 380kv)engrandyNo ratings yet
- NTPC CW - 3006600303 - Sec - C - Rev - BDocument93 pagesNTPC CW - 3006600303 - Sec - C - Rev - BGautamupadhyay100% (1)
- CYMTCC For Windows: User's Guide and Reference ManualDocument290 pagesCYMTCC For Windows: User's Guide and Reference ManualJosselynGalloMuñozNo ratings yet
- Transformer Details ReportDocument1 pageTransformer Details Reportwaseem kausarNo ratings yet
- Power Systems Relays Relion 670Document43 pagesPower Systems Relays Relion 670kass_ecsNo ratings yet
- Cap P13Document5 pagesCap P13Siva NandhamNo ratings yet
- 14 Voltage Regulation and Per Unit SystemDocument13 pages14 Voltage Regulation and Per Unit SystemAlfredo Brumnić FredoNo ratings yet
- Directional OverDocument28 pagesDirectional OverEdinson Milton Gaona BarbozaNo ratings yet
- Transient Stability 2Document29 pagesTransient Stability 2Carlos Ortiz de ZevallosNo ratings yet
- Harmonic Analysis Hand Calculation For THDDocument3 pagesHarmonic Analysis Hand Calculation For THDFabian Andres Calderon HernandezNo ratings yet
- 4202A, PowerTransformerDocument13 pages4202A, PowerTransformerkuttrNo ratings yet
- IEEE CTs and PTs 6 10Document99 pagesIEEE CTs and PTs 6 10brianwg2100% (1)
- TechRef 3-W-Transformer 3phaseDocument40 pagesTechRef 3-W-Transformer 3phaseTorrez JeanNo ratings yet
- Motor CalculationsDocument8 pagesMotor CalculationssmhbNo ratings yet
- R-407c by KevinDocument2 pagesR-407c by KevinmicrefeeNo ratings yet
- Quick Chilled Water EstimationDocument2 pagesQuick Chilled Water EstimationSami Khoury100% (5)
- The Role of The Praise and Worship Leader: A Model For Preparing The Singer For Leadership in Contemporary WorshipDocument142 pagesThe Role of The Praise and Worship Leader: A Model For Preparing The Singer For Leadership in Contemporary WorshipmicrefeeNo ratings yet
- HAP44 ManualDocument148 pagesHAP44 ManualmicrefeeNo ratings yet
- Optimizer ManualDocument84 pagesOptimizer ManualmicrefeeNo ratings yet
- ASMA BuildingDocument5 pagesASMA BuildingmicrefeeNo ratings yet
- Modified BitumenDocument2 pagesModified BitumenmicrefeeNo ratings yet
- KeTTHA - Incentives For Renewable Energy, Energy Efficiency & Green Buildings in MalaysiaDocument22 pagesKeTTHA - Incentives For Renewable Energy, Energy Efficiency & Green Buildings in MalaysiamicrefeeNo ratings yet
- GBI NREB Non-Residential Existing Building Tool V1.1 FinalDocument19 pagesGBI NREB Non-Residential Existing Building Tool V1.1 FinalIvan WongNo ratings yet
- 6204 Parts Lists PDFDocument51 pages6204 Parts Lists PDFMirzaNo ratings yet
- (SiC-En-2013-22) Molding Compounds Adhesion and Influence On Reliability of Plastic Packages For SiC-Based Power MOS DevicesDocument13 pages(SiC-En-2013-22) Molding Compounds Adhesion and Influence On Reliability of Plastic Packages For SiC-Based Power MOS Devicesnuaa_qhhNo ratings yet
- ML4824 Power Factor Correction and PWM Controller Combo: General Description FeaturesDocument16 pagesML4824 Power Factor Correction and PWM Controller Combo: General Description FeaturesTaras100% (1)
- Sony Play StationDocument26 pagesSony Play Stationvivekmiku100% (1)
- Continuous Heart Rate and Body Temperature Monitoring System Using Arduino UNO and Android DeviceDocument6 pagesContinuous Heart Rate and Body Temperature Monitoring System Using Arduino UNO and Android DeviceHarshitaNo ratings yet
- Incubators 0805Document9 pagesIncubators 0805Angelito Gelo RodríguezNo ratings yet
- A Novel High-Gain DC-DC Converter Applied in Fuel Cell VehiclesDocument13 pagesA Novel High-Gain DC-DC Converter Applied in Fuel Cell Vehiclesrock starNo ratings yet
- Milkytracker Guide: Milkytracker Manual Milkytracker Video Tutorial by Simon WesselDocument9 pagesMilkytracker Guide: Milkytracker Manual Milkytracker Video Tutorial by Simon WesselPavlowNo ratings yet
- 1783 td001 - en PDocument72 pages1783 td001 - en PDavidNo ratings yet
- O W N e R S M A N UDocument6 pagesO W N e R S M A N Uapi-25885158100% (2)
- TTA-TWE Catálogo (Inglés)Document138 pagesTTA-TWE Catálogo (Inglés)kuraimund100% (1)
- Practical Guide To InstrumentationDocument12 pagesPractical Guide To InstrumentationradiobrunoNo ratings yet
- HISIC450 Overheight Detectors: Reliable Overheight Detection of VehiclesDocument8 pagesHISIC450 Overheight Detectors: Reliable Overheight Detection of Vehiclesazer NadingaNo ratings yet
- Aire Acondicionado ASY12FSBCWDocument2 pagesAire Acondicionado ASY12FSBCWJano NymusNo ratings yet
- The Learner Demonstrates Understanding of Media and Information Literacy (MIL) and MIL Related ConceptsDocument4 pagesThe Learner Demonstrates Understanding of Media and Information Literacy (MIL) and MIL Related ConceptsJules MarcoNo ratings yet
- C Pen 3.5 Product SheetDocument1 pageC Pen 3.5 Product Sheetjaggy286No ratings yet
- S202P-C40 Miniature Circuit Breaker - 2P - C - 40 A: Product-DetailsDocument6 pagesS202P-C40 Miniature Circuit Breaker - 2P - C - 40 A: Product-DetailsBilalNo ratings yet
- Marechal DX2 Decontactor Range enDocument2 pagesMarechal DX2 Decontactor Range enramana.kumarNo ratings yet
- Catalogo Edibon 2018Document96 pagesCatalogo Edibon 2018fgrojasgNo ratings yet
- Matrix Stiffness MethodDocument9 pagesMatrix Stiffness Methodimran5705074No ratings yet
- Veriflame EclipseDocument48 pagesVeriflame Eclipsecarlos pachecoNo ratings yet
- Domekt R 300 VDocument1 pageDomekt R 300 Vaaaaaaa330208193No ratings yet
- RGMO Frequency Influence SchemeDocument1 pageRGMO Frequency Influence SchemeJitendra SharmaNo ratings yet
- OPzS Solar - Power En0213Document2 pagesOPzS Solar - Power En0213janiankoNo ratings yet
- Research Paper GPS Based Voice Alert System For The BlindDocument5 pagesResearch Paper GPS Based Voice Alert System For The BlindVenkata RatnamNo ratings yet
- An Autonomous Flight Safety SystemDocument12 pagesAn Autonomous Flight Safety SystemWoofyNo ratings yet
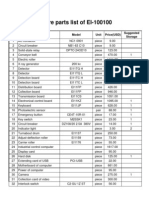
- Ei 100100Document2 pagesEi 100100Tabassum BanuNo ratings yet
- 150 TOP ELECTROSTATIC Multiple Choice Questions and Answers PDFDocument30 pages150 TOP ELECTROSTATIC Multiple Choice Questions and Answers PDFEarl Jenn AbellaNo ratings yet
- Digital Communications - Viva Voce QuestionsDocument3 pagesDigital Communications - Viva Voce QuestionsAllanki Sanyasi Rao100% (1)