You might also like
- Periodic Differential Equations: An Introduction to Mathieu, Lamé, and Allied FunctionsFrom EverandPeriodic Differential Equations: An Introduction to Mathieu, Lamé, and Allied FunctionsNo ratings yet
- Numerical Solution of Systems of Nonlinear Algebraic EquationsFrom EverandNumerical Solution of Systems of Nonlinear Algebraic EquationsGeorge D. ByrneRating: 5 out of 5 stars5/5 (1)
- Nonlinear Ordinary Differential Equations in Transport ProcessesFrom EverandNonlinear Ordinary Differential Equations in Transport ProcessesNo ratings yet
- Computational Methods in Nonlinear Structural and Solid Mechanics: Papers Presented at the Symposium on Computational Methods in Nonlinear Structural and Solid MechanicsFrom EverandComputational Methods in Nonlinear Structural and Solid Mechanics: Papers Presented at the Symposium on Computational Methods in Nonlinear Structural and Solid MechanicsAhmed K. NoorNo ratings yet
- Factorization Methods for Discrete Sequential EstimationFrom EverandFactorization Methods for Discrete Sequential EstimationNo ratings yet
- Stability of Discrete Non-conservative SystemsFrom EverandStability of Discrete Non-conservative SystemsRating: 1 out of 5 stars1/5 (1)
- Computational Structural Mechanics & Fluid Dynamics: Advances and TrendsFrom EverandComputational Structural Mechanics & Fluid Dynamics: Advances and TrendsA.K. NoorNo ratings yet
- Computational Wind Engineering 1: Proceedings of the 1st International Symposium on Computational Wind Engineering (CWE 92) Tokyo, Japan, August 21-23, 1992From EverandComputational Wind Engineering 1: Proceedings of the 1st International Symposium on Computational Wind Engineering (CWE 92) Tokyo, Japan, August 21-23, 1992S. MurakamiNo ratings yet
- Wave Propagation in Layered Anisotropic Media: with Application to CompositesFrom EverandWave Propagation in Layered Anisotropic Media: with Application to CompositesNo ratings yet
- Stability of Linear Systems: Some Aspects of Kinematic SimilarityFrom EverandStability of Linear Systems: Some Aspects of Kinematic SimilarityNo ratings yet
- The Theory of Splines and Their Applications: Mathematics in Science and Engineering: A Series of Monographs and Textbooks, Vol. 38From EverandThe Theory of Splines and Their Applications: Mathematics in Science and Engineering: A Series of Monographs and Textbooks, Vol. 38No ratings yet
- An Efficient 3D Toplogy Optimization Code Written in MATLABDocument22 pagesAn Efficient 3D Toplogy Optimization Code Written in MATLABBarraq_00No ratings yet
- Matrix Methods of Structural Analysis: Pergamon International Library of Science, Technology, Engineering and Social StudiesFrom EverandMatrix Methods of Structural Analysis: Pergamon International Library of Science, Technology, Engineering and Social StudiesRating: 4.5 out of 5 stars4.5/5 (3)
- Matrix Theory and Applications for Scientists and EngineersFrom EverandMatrix Theory and Applications for Scientists and EngineersNo ratings yet
- Parallel Computational Fluid Dynamics '93: New Trends and AdvancesFrom EverandParallel Computational Fluid Dynamics '93: New Trends and AdvancesJ. HauserNo ratings yet
- Model Analysis of Plane Structures: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionFrom EverandModel Analysis of Plane Structures: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionNo ratings yet
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsFrom EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsNo ratings yet
- Numerical Solution of Ordinary and Partial Differential Equations: Based on a Summer School Held in Oxford, August-September 1961From EverandNumerical Solution of Ordinary and Partial Differential Equations: Based on a Summer School Held in Oxford, August-September 1961No ratings yet
- Differential Equations: Stability, Oscillations, Time LagsFrom EverandDifferential Equations: Stability, Oscillations, Time LagsRating: 5 out of 5 stars5/5 (1)
- Matlab Code For A Level Set-Based Topology Optimization Method Using A Reaction Diffusion EquationDocument14 pagesMatlab Code For A Level Set-Based Topology Optimization Method Using A Reaction Diffusion EquationSuraj RavindraNo ratings yet
- Low-Rank Models in Visual Analysis: Theories, Algorithms, and ApplicationsFrom EverandLow-Rank Models in Visual Analysis: Theories, Algorithms, and ApplicationsNo ratings yet
- Differential Quadrature and Differential Quadrature Based Element Methods: Theory and ApplicationsFrom EverandDifferential Quadrature and Differential Quadrature Based Element Methods: Theory and ApplicationsNo ratings yet
- Mathematical Programming: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, and the U. S. Army at Madison, September 11-13, 1972From EverandMathematical Programming: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, and the U. S. Army at Madison, September 11-13, 1972No ratings yet
- 3D Discrete Element Workbench for Highly Dynamic Thermo-mechanical Analysis: GranOOFrom Everand3D Discrete Element Workbench for Highly Dynamic Thermo-mechanical Analysis: GranOORating: 5 out of 5 stars5/5 (1)
- Cartesian Tensors in Engineering Science: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionFrom EverandCartesian Tensors in Engineering Science: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionNo ratings yet
- Theoretical Numerical Analysis: An Introduction to Advanced TechniquesFrom EverandTheoretical Numerical Analysis: An Introduction to Advanced TechniquesNo ratings yet
- An Introduction To Numerical Methods For The Solutions of Partial Differential EquationsDocument12 pagesAn Introduction To Numerical Methods For The Solutions of Partial Differential EquationseiroNo ratings yet
- Watertight Trimmed NURBSDocument8 pagesWatertight Trimmed NURBSrejishmar30No ratings yet
- Matlab Implementation of FEM For ElasticityDocument25 pagesMatlab Implementation of FEM For ElasticityHussin KetoutNo ratings yet
- The Inventor MentorDocument271 pagesThe Inventor MentorΑρετή ΣταματούρουNo ratings yet
- Static Analysis of Timoshenko Beams Using Isogeometric ApproachDocument9 pagesStatic Analysis of Timoshenko Beams Using Isogeometric ApproachcapicaNo ratings yet
- Shape and Cross Section Optimisation of A Truss StructureDocument15 pagesShape and Cross Section Optimisation of A Truss StructureAakash Mohan100% (1)
- (Richard O. Duda, Peter E. Hart, David G. Stork) P (BookFi)Document673 pages(Richard O. Duda, Peter E. Hart, David G. Stork) P (BookFi)Hammad MukhtarNo ratings yet
- Script User PDFDocument319 pagesScript User PDFEmmanuel NicholasNo ratings yet
- On Teaching Finite Element Method in Plasticity With MathematicaDocument10 pagesOn Teaching Finite Element Method in Plasticity With MathematicayesullenNo ratings yet
- A One Hour Course On Nonlinear Modeling of Structures. Computational Framework For Earthquake SimulationDocument30 pagesA One Hour Course On Nonlinear Modeling of Structures. Computational Framework For Earthquake SimulationPhan Đào Hoàng HiệpNo ratings yet
- Proceedings of The 16th International Symposium For Tubular Structures (ISTS 2017) DecemDocument721 pagesProceedings of The 16th International Symposium For Tubular Structures (ISTS 2017) DecemPhan Đào Hoàng HiệpNo ratings yet
- @constitutive Model For Confined Ultra-High Strength Concrete in Steel Tube, 2016Document11 pages@constitutive Model For Confined Ultra-High Strength Concrete in Steel Tube, 2016Phan Đào Hoàng HiệpNo ratings yet
- Elevated Temperature Material Properties of Cold-Formed Steel Hollow Sections, 2015 (Finian McCann)Document11 pagesElevated Temperature Material Properties of Cold-Formed Steel Hollow Sections, 2015 (Finian McCann)Phan Đào Hoàng HiệpNo ratings yet
- Using Reactions: Applying A Reaction - Structural Toolkit ModulesDocument11 pagesUsing Reactions: Applying A Reaction - Structural Toolkit ModulesPhan Đào Hoàng HiệpNo ratings yet
- Using A Custom Steel SectionDocument9 pagesUsing A Custom Steel SectionPhan Đào Hoàng HiệpNo ratings yet
- Linking Analysis ExampleDocument14 pagesLinking Analysis ExamplePhan Đào Hoàng HiệpNo ratings yet
- 2019 DSSIMULIA - Established - Isotropic Elasto-PlasticityDocument6 pages2019 DSSIMULIA - Established - Isotropic Elasto-PlasticityPhan Đào Hoàng HiệpNo ratings yet
- 2019 DSSIMULIA - Established - Damaged Plasticity Model For Concrete and Other Quasi-Brittle MaterialsDocument11 pages2019 DSSIMULIA - Established - Damaged Plasticity Model For Concrete and Other Quasi-Brittle MaterialsPhan Đào Hoàng HiệpNo ratings yet
- 2019 DSSIMULIA - Established - An Inelastic Constitutive Model For ConcreteDocument10 pages2019 DSSIMULIA - Established - An Inelastic Constitutive Model For ConcretePhan Đào Hoàng HiệpNo ratings yet
- 2019 DSSIMULIA - Established - A Cracking Model For Concrete and Other Brittle MaterialsDocument9 pages2019 DSSIMULIA - Established - A Cracking Model For Concrete and Other Brittle MaterialsPhan Đào Hoàng HiệpNo ratings yet
- 2019 DSSIMULIA - Established - Integration of Plasticity ModelsDocument3 pages2019 DSSIMULIA - Established - Integration of Plasticity ModelsPhan Đào Hoàng HiệpNo ratings yet
- 2019 DSSIMULIA - Established - About Plasticity ModelsDocument3 pages2019 DSSIMULIA - Established - About Plasticity ModelsPhan Đào Hoàng HiệpNo ratings yet
- US A Narrative History, Volume 2 Since 1865 by James West Davidson Et Al.Document433 pagesUS A Narrative History, Volume 2 Since 1865 by James West Davidson Et Al.Phan Đào Hoàng Hiệp100% (3)
- U.S. - A Narrative History, Volume 1 - To 1865Document380 pagesU.S. - A Narrative History, Volume 1 - To 1865Phan Đào Hoàng Hiệp86% (7)
- Elections USA - in Brief Series - English - Hi ResDocument60 pagesElections USA - in Brief Series - English - Hi ResPhan Đào Hoàng HiệpNo ratings yet
- Democracy in Brief - in Brief Series - English - Hi ResDocument84 pagesDemocracy in Brief - in Brief Series - English - Hi ResPhan Đào Hoàng HiệpNo ratings yet
- Machine LearningDocument4 pagesMachine LearningKrishna Chivukula100% (2)
- Objective TestsDocument4 pagesObjective TestsBabita DhruwNo ratings yet
- LS7183Document4 pagesLS7183Udinei RamosNo ratings yet
- Chapter 13Document12 pagesChapter 13Andrew PhamNo ratings yet
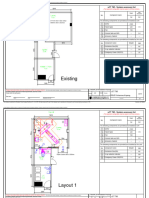
- Desain Ruangan CT-ScanDocument3 pagesDesain Ruangan CT-ScannewmanonmarsNo ratings yet
- TQM Unit - 5Document11 pagesTQM Unit - 5Sukanth KannanNo ratings yet
- Research Project ReportDocument21 pagesResearch Project ReportinternationalbankNo ratings yet
- Fingerprint Recognition: Some Biological Principles (Moenssens 1971) Related To Fingerprint Recognition Are As FollowsDocument40 pagesFingerprint Recognition: Some Biological Principles (Moenssens 1971) Related To Fingerprint Recognition Are As Follows00matrix00100% (1)
- Clel083e138 MVSWG Exe WDG 601Document40 pagesClel083e138 MVSWG Exe WDG 601arielaparicioNo ratings yet
- QuestionsDocument4 pagesQuestionsgunaNo ratings yet
- Supplementary Communication Sheet: (Document/Drawing Information) With Regard To Ring ForgingDocument2 pagesSupplementary Communication Sheet: (Document/Drawing Information) With Regard To Ring ForgingpkguptaqaqcNo ratings yet
- Pengumuman Matakuliah Pilihan 2110 - KMGDocument85 pagesPengumuman Matakuliah Pilihan 2110 - KMGMartha Wulan TumangkengNo ratings yet
- Problem Set 1 PDFDocument3 pagesProblem Set 1 PDFMrinal TripathiNo ratings yet
- 1979 Chevrolet Corvette SpecificationsDocument122 pages1979 Chevrolet Corvette SpecificationsB100% (1)
- EQ Coefficients PDFDocument15 pagesEQ Coefficients PDFcristian1961No ratings yet
- Data Modelling Using ERD With Crow Foot NotationDocument15 pagesData Modelling Using ERD With Crow Foot NotationDonald HeathNo ratings yet
- TMP 20364 Asia Pacific Rail 2018 Brochure 114805717Document13 pagesTMP 20364 Asia Pacific Rail 2018 Brochure 114805717jasminetsoNo ratings yet
- jEDI Programmers GuideDocument78 pagesjEDI Programmers Guidewhisky8750% (2)
- Implication of Pure Food Act of BDDocument50 pagesImplication of Pure Food Act of BDNadeem Nafis100% (2)
- Astm A 159 - 83 R01Document5 pagesAstm A 159 - 83 R01Er WidodoNo ratings yet
- 1PX12PSCNARMDDocument1 page1PX12PSCNARMDJainam ShahNo ratings yet
- 3102354-EN R015 VS Series Compatibility ListDocument20 pages3102354-EN R015 VS Series Compatibility ListFrancisco CanoNo ratings yet
- LRB PS Inr18650b4 Rev7Document10 pagesLRB PS Inr18650b4 Rev7jeznerNo ratings yet
- Stakeholder Analysis TemplateDocument3 pagesStakeholder Analysis TemplateKniza Kniza100% (2)
- The Joy of Computing Using Python: Assignment 1Document6 pagesThe Joy of Computing Using Python: Assignment 1Farheen BanoNo ratings yet
- Experimental PsychologyDocument38 pagesExperimental PsychologyPauloKinaging100% (2)
- MikrotikDocument4 pagesMikrotikShinichi Ana100% (1)
- Contoh ResumeDocument4 pagesContoh ResumeRosli Hadi BachokNo ratings yet
- Factors Affecting Career Track and Strand Choices of Grade 9 Students in The Division of Antipolo and Rizal, PhilippinesDocument3 pagesFactors Affecting Career Track and Strand Choices of Grade 9 Students in The Division of Antipolo and Rizal, PhilippinesJASH MATHEW100% (7)
- 1MRK504141-BEN A en Product Guide Transformer Protection RET670 2.0Document125 pages1MRK504141-BEN A en Product Guide Transformer Protection RET670 2.0Insan AzizNo ratings yet