You might also like
- Calculus Modules - Scope and SequenceDocument13 pagesCalculus Modules - Scope and SequenceKhushali Gala NarechaniaNo ratings yet
- Algo Trading Intro 2013 Steinki Session 3 PDFDocument15 pagesAlgo Trading Intro 2013 Steinki Session 3 PDFMichael ARKNo ratings yet
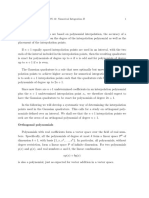
- Elementary Properties of Cyclotomic Polynomials by Yimin GeDocument8 pagesElementary Properties of Cyclotomic Polynomials by Yimin GeGary BlakeNo ratings yet
- Fourier Series NotesDocument19 pagesFourier Series NotesTrue BagNo ratings yet
- Fielder - Fractal GeometryDocument14 pagesFielder - Fractal GeometryJulio JoséNo ratings yet
- Algo Trading Intro 2013 Steinki Session 8 PDFDocument21 pagesAlgo Trading Intro 2013 Steinki Session 8 PDFMichael ARKNo ratings yet
- Lower Bounds For Numbers of ABC-Hits: Sander Dahmen October 5, 2006Document9 pagesLower Bounds For Numbers of ABC-Hits: Sander Dahmen October 5, 2006Dmitri MartilaNo ratings yet
- FourierDocument21 pagesFourierAndika Bayu AjiNo ratings yet
- 000014Document2 pages000014wiertrass2016No ratings yet
- CS 171 Lecture Outline: February 15, 2010Document4 pagesCS 171 Lecture Outline: February 15, 2010LizanuraidaNo ratings yet
- Mathematical Physics: MP205 Vibrations and WavesDocument45 pagesMathematical Physics: MP205 Vibrations and WavesMaruf Ahmed AsadNo ratings yet
- FourierDocument2 pagesFourierYosua Heru IrawanNo ratings yet
- Fourier Series.: V IV JV KV I J I IDocument4 pagesFourier Series.: V IV JV KV I J I ISourav ChatterjeeNo ratings yet
- Riemann Zeta (2k) Using Fourier AnalysisDocument7 pagesRiemann Zeta (2k) Using Fourier AnalysisRobertNo ratings yet
- Quiz1 PDFDocument4 pagesQuiz1 PDFArpit JhunjhunwalaNo ratings yet
- Fourier Series and Simple Applications: Rahul SinghDocument7 pagesFourier Series and Simple Applications: Rahul SinghRahul Yogendra SinghNo ratings yet
- Basic Concepts of The Poisson ProcessDocument8 pagesBasic Concepts of The Poisson ProcessQurban khaton HussainyarNo ratings yet
- MSS 321 Tutorial 1Document3 pagesMSS 321 Tutorial 1Melchizedek MashamboNo ratings yet
- MSO201a: Probability and Statistics 2019-20-II Semester Assignment No. 6 Instructor: Neeraj MisraDocument3 pagesMSO201a: Probability and Statistics 2019-20-II Semester Assignment No. 6 Instructor: Neeraj MisraAdarsh BanthNo ratings yet
- Homework 1Document4 pagesHomework 1Bilal Yousaf0% (1)
- Spring 2021: Numerical Analysis Assignment 5 (Due Thursday April 22nd 10:00am)Document4 pagesSpring 2021: Numerical Analysis Assignment 5 (Due Thursday April 22nd 10:00am)Dibs ManiacNo ratings yet
- IntroRealAnal ch10Document21 pagesIntroRealAnal ch10chandan gowdaNo ratings yet
- Notes: Edited by Jimmie D. Lawson and William AdkinsDocument20 pagesNotes: Edited by Jimmie D. Lawson and William AdkinsumerfarooqueNo ratings yet
- Problems on congruences and divisibilityDocument3 pagesProblems on congruences and divisibilityCristian MoraruNo ratings yet
- Differential Geometry NotesDocument6 pagesDifferential Geometry NotesSanjeev ShuklaNo ratings yet
- Ps 5Document2 pagesPs 5Henry HughesNo ratings yet
- Optimization Techniques 1. Least SquaresDocument17 pagesOptimization Techniques 1. Least SquaresKhalil UllahNo ratings yet
- Consecutive primes in short intervalsDocument82 pagesConsecutive primes in short intervalsSam TaylorNo ratings yet
- MAT 3633 Note 1 Lagrange Interpolation: 1.1 The Lagrange Interpolating PolynomialDocument16 pagesMAT 3633 Note 1 Lagrange Interpolation: 1.1 The Lagrange Interpolating PolynomialKuhu KoyaliyaNo ratings yet
- Sol Contain Prob 26 of Set 1Document32 pagesSol Contain Prob 26 of Set 1Co londota2No ratings yet
- 1 Superposition of Standing Waves: Weston Barger July 13, 2016Document9 pages1 Superposition of Standing Waves: Weston Barger July 13, 2016ranvNo ratings yet
- Series by FourierDocument6 pagesSeries by FourierMandela Bright QuashieNo ratings yet
- Mathematical Tripos: Monday 11 June 2001 9 To 11Document4 pagesMathematical Tripos: Monday 11 June 2001 9 To 11KaustubhNo ratings yet
- SC505 Linear Algebra Basis Dimensions TransformationsDocument3 pagesSC505 Linear Algebra Basis Dimensions Transformations2021 21004No ratings yet
- Assignment 4 Basis, Dimensions and Linear TransformationsDocument3 pagesAssignment 4 Basis, Dimensions and Linear Transformations2021 21004No ratings yet
- Basic Concepts of The Poisson ProcessDocument12 pagesBasic Concepts of The Poisson ProcessAlan LirANo ratings yet
- IMC Simulation: June 15, 2009Document4 pagesIMC Simulation: June 15, 2009Syaifullah MangantjoNo ratings yet
- Maximizing a function over partition vectorsDocument2 pagesMaximizing a function over partition vectorsMartin EgozcueNo ratings yet
- Math 121A: Homework 7 SolutionsDocument9 pagesMath 121A: Homework 7 SolutionscfisicasterNo ratings yet
- LinJedn I Reda-1Document25 pagesLinJedn I Reda-1vahidmesic45No ratings yet
- Math152 Spring2023 Section11 9Document11 pagesMath152 Spring2023 Section11 9Nate ProvostNo ratings yet
- Floor Solutions PDFDocument5 pagesFloor Solutions PDFdrgd85No ratings yet
- Ejercicios PinskyDocument66 pagesEjercicios PinskyA KarenMartz HerdezNo ratings yet
- Module 21 - DantzigWolfeDocument7 pagesModule 21 - DantzigWolfenicholaszyliNo ratings yet
- Homework 2Document2 pagesHomework 2I Gede ArjanaNo ratings yet
- Unit - I - TpdeDocument72 pagesUnit - I - TpdeAmal_YaguNo ratings yet
- Fourier SeriesDocument41 pagesFourier SeriesDeepakNo ratings yet
- IA - Analysis I EgDocument8 pagesIA - Analysis I EgDedliNo ratings yet
- MR 1 2023 Eulers Totient FunctionDocument11 pagesMR 1 2023 Eulers Totient FunctionDebmalya DattaNo ratings yet
- Handout 3 Elements of Linear ProgrammingDocument11 pagesHandout 3 Elements of Linear Programminglu huangNo ratings yet
- 2011 U of I Mock Putnam Contest SolutionsDocument5 pages2011 U of I Mock Putnam Contest SolutionsGag PafNo ratings yet
- Math6338 hw7 PDFDocument3 pagesMath6338 hw7 PDFSamantha' Dextre EspinozaNo ratings yet
- Graphs of polynomial functionsDocument6 pagesGraphs of polynomial functionstempmail user 69No ratings yet
- Heat EquationDocument7 pagesHeat Equationinas yahyaNo ratings yet
- Sperner's Lemma and Fixed Point TheoryDocument17 pagesSperner's Lemma and Fixed Point TheoryMoctezumaMorteraNo ratings yet
- Tutsheet 5Document2 pagesTutsheet 5vishnuNo ratings yet
- Fourier Series and Periodicity: Cos Sin 2Document8 pagesFourier Series and Periodicity: Cos Sin 2Jonathan paulino castilloNo ratings yet
- Massachusetts Institute of Technology Opencourseware 8.03Sc Fall 2012 Problem Set #5 SolutionsDocument8 pagesMassachusetts Institute of Technology Opencourseware 8.03Sc Fall 2012 Problem Set #5 SolutionsTushar ShrimaliNo ratings yet
- Inhomogeneous PDFDocument16 pagesInhomogeneous PDFdenizinakNo ratings yet
- Gaussian Quadrature Rule for Numerical IntegrationDocument5 pagesGaussian Quadrature Rule for Numerical IntegrationLee Hei LongNo ratings yet
- Algebraic Combinatorics: 1 Formal SeriesDocument12 pagesAlgebraic Combinatorics: 1 Formal SeriesDavid DavidNo ratings yet
- Mathematical Tripos Part IB: Lent 2010 Numerical Analysis – Lecture 11 & 21Document41 pagesMathematical Tripos Part IB: Lent 2010 Numerical Analysis – Lecture 11 & 21fdsdsfsdfmgNo ratings yet
- MIT Lecture on Central Limit Theorem and its ProofDocument17 pagesMIT Lecture on Central Limit Theorem and its ProofzahiruddinNo ratings yet
- The Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64From EverandThe Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64No ratings yet
- Sol13 PDFDocument11 pagesSol13 PDFMichael ARKNo ratings yet
- Sol1 PDFDocument19 pagesSol1 PDFMichael ARK100% (1)
- Dis11 SolDocument5 pagesDis11 SolMichael ARKNo ratings yet
- EECS 16B Homework 9: Moore-Penrose Pseudoinverse for Fat MatricesDocument7 pagesEECS 16B Homework 9: Moore-Penrose Pseudoinverse for Fat MatricesMichael ARKNo ratings yet
- Prob13: 1 EE16A Homework 13Document23 pagesProb13: 1 EE16A Homework 13Michael ARKNo ratings yet
- Sol6 PDFDocument8 pagesSol6 PDFMichael ARKNo ratings yet
- Sol10 PDFDocument4 pagesSol10 PDFMichael ARKNo ratings yet
- EECS 16B Homework 4 Transfer Functions and Bode PlotsDocument26 pagesEECS 16B Homework 4 Transfer Functions and Bode PlotsMichael ARKNo ratings yet
- Sol7 PDFDocument12 pagesSol7 PDFMichael ARKNo ratings yet
- Sol5 PDFDocument31 pagesSol5 PDFMichael ARKNo ratings yet
- Sol8 PDFDocument11 pagesSol8 PDFMichael ARKNo ratings yet
- Algo Trading Intro 2013 Steinki Session 7 PDFDocument19 pagesAlgo Trading Intro 2013 Steinki Session 7 PDFMichael ARKNo ratings yet
- Sol12 PDFDocument6 pagesSol12 PDFMichael ARKNo ratings yet
- Sol3 PDFDocument11 pagesSol3 PDFMichael ARKNo ratings yet
- Sol2 PDFDocument11 pagesSol2 PDFMichael ARKNo ratings yet
- EECS 16B Homework 0 Op-Amp Circuit AnalysisDocument7 pagesEECS 16B Homework 0 Op-Amp Circuit AnalysisMichael ARKNo ratings yet
- Algo Trading Intro 2013 Steinki Session 12Document16 pagesAlgo Trading Intro 2013 Steinki Session 12williamfeNo ratings yet
- Algo Trading Performance Analysis - Returns, Risk, EfficiencyDocument11 pagesAlgo Trading Performance Analysis - Returns, Risk, EfficiencywilliamfeNo ratings yet
- Time CardsDocument3 pagesTime CardsMichael ARKNo ratings yet
- Algo Trading Intro 2013 Steinki Session 10 PDFDocument21 pagesAlgo Trading Intro 2013 Steinki Session 10 PDFMichael ARKNo ratings yet
- WP Content - Uploads - 2014 - 03 - Algo Trading Intro 2013 Steinki Session 1 PDFDocument18 pagesWP Content - Uploads - 2014 - 03 - Algo Trading Intro 2013 Steinki Session 1 PDFTheodoros MaragakisNo ratings yet
- Algo Trading Intro 2013 Steinki Session 4 PDFDocument16 pagesAlgo Trading Intro 2013 Steinki Session 4 PDFMichael ARKNo ratings yet
- PSSP 4Document6 pagesPSSP 4tony sparkNo ratings yet
- CDS Maths Syllabus Topics: Number SystemDocument2 pagesCDS Maths Syllabus Topics: Number SystemDARSHAN S PNo ratings yet
- Mathtest 2020 BDocument7 pagesMathtest 2020 Byanikwendu1No ratings yet
- Jee Mathmatic PaperDocument16 pagesJee Mathmatic PaperDeepesh KumarNo ratings yet
- Ibhm 086-107 PolinomialDocument12 pagesIbhm 086-107 PolinomialokeNo ratings yet
- Unit 1 Sequence Final-Bsc-012-Bl2Document33 pagesUnit 1 Sequence Final-Bsc-012-Bl2PrasanthNo ratings yet
- Algorithms for Low Level Bit Manipulation and Combinatorial GenerationDocument7 pagesAlgorithms for Low Level Bit Manipulation and Combinatorial Generationhkm_gmat4849No ratings yet
- Daa Lab Manual 21cs42Document44 pagesDaa Lab Manual 21cs42Kaif KNo ratings yet
- Graph of Ackermann-Function Is PRDocument10 pagesGraph of Ackermann-Function Is PRgodwskyNo ratings yet
- Simplex Minimization ProblemDocument22 pagesSimplex Minimization ProblemShreyasKamatNo ratings yet
- CH 05Document73 pagesCH 05Christina HillNo ratings yet
- Daa Project FileDocument49 pagesDaa Project FileYogesh KathayatNo ratings yet
- Stability Analysis: Unit-IiiDocument12 pagesStability Analysis: Unit-IiirocklinetoNo ratings yet
- Name Mail: Usuario (String String Usuario (String Name, String Mail) (. Name - MailDocument11 pagesName Mail: Usuario (String String Usuario (String Name, String Mail) (. Name - MailAntonela TommaselNo ratings yet
- Data Structure and Program Design Notes RtmnuDocument121 pagesData Structure and Program Design Notes Rtmnuvishal mankar100% (1)
- General Mathematics Activity Sheet Week 5 6Document4 pagesGeneral Mathematics Activity Sheet Week 5 6Luke JessieMhar LumberioNo ratings yet
- ALGEBRA PROBLEMS AND SOLUTIONSDocument139 pagesALGEBRA PROBLEMS AND SOLUTIONSkartikNo ratings yet
- CLS JEEAD-18-19 XIII Mat Target-7 SET-1 Chapter-24Document130 pagesCLS JEEAD-18-19 XIII Mat Target-7 SET-1 Chapter-24NS Math Classes100% (1)
- Polynomial FunctionsDocument31 pagesPolynomial FunctionsAdnan BukhariNo ratings yet
- Systems All Types Review Worksheet PDFDocument2 pagesSystems All Types Review Worksheet PDFJames MartinNo ratings yet
- Algorithms For Chemical Computations (Acs Symposium Series No 46)Document157 pagesAlgorithms For Chemical Computations (Acs Symposium Series No 46)sairama786No ratings yet
- 267947Document56 pages267947Víctor HugoNo ratings yet
- Isc Class 11 Maths Mock Question Paper 2Document5 pagesIsc Class 11 Maths Mock Question Paper 2Gaurav ShuklaNo ratings yet
- SIMPLIFICATION TRICKSDocument4 pagesSIMPLIFICATION TRICKSAsjal HameedNo ratings yet
- 8 BooleanDocument8 pages8 BooleanVishal GaurNo ratings yet
- 2Q 1st-4th Sum. Test in Math With TOSDocument8 pages2Q 1st-4th Sum. Test in Math With TOSDYNA ALTAREJOSNo ratings yet
- Get Discount Study Material at PICKMYCOACHING.comDocument16 pagesGet Discount Study Material at PICKMYCOACHING.comaustinfru7No ratings yet
- Systems of Inequalities Solved(MathDocument25 pagesSystems of Inequalities Solved(MathEd VillNo ratings yet