You might also like
- Tables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiFrom EverandTables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiNo ratings yet
- (EXTRACT) Etabs Analysis Reference v18 - Friction Pendulum - Single, Double & TripleDocument13 pages(EXTRACT) Etabs Analysis Reference v18 - Friction Pendulum - Single, Double & TripleO SNo ratings yet
- Chapter 3Document20 pagesChapter 3Suleiman AldbeisNo ratings yet
- FracturaDocument6 pagesFracturajoseNo ratings yet
- ME356-gfk Chapter1 IdlDocument44 pagesME356-gfk Chapter1 IdlBernard BempongNo ratings yet
- Deflection of BeamsDocument7 pagesDeflection of Beamsأحمد عبد الرضا ياسينNo ratings yet
- 1.1. STRESS: Figure ADocument27 pages1.1. STRESS: Figure AJayNo ratings yet
- Reiche 2002 0391Document19 pagesReiche 2002 0391Particle Beam Physics LabNo ratings yet
- MSE - 2 - Linear Elastic Beharvior (6-7 Elastic Constant)Document26 pagesMSE - 2 - Linear Elastic Beharvior (6-7 Elastic Constant)Trần NamNo ratings yet
- Coil SpringDocument14 pagesCoil SpringLeti HanajNo ratings yet
- Barsoum 1970Document18 pagesBarsoum 1970Doan Nguyen VanNo ratings yet
- Beam Deflection ReportDocument30 pagesBeam Deflection ReportandrewsugihartoNo ratings yet
- Introduction To Fracture Mechanics Introduction To Fracture MechanicsDocument56 pagesIntroduction To Fracture Mechanics Introduction To Fracture MechanicsAKSHAY SHINDOLKARNo ratings yet
- Unit 4 NotesDocument36 pagesUnit 4 NotesDamotharan Sathesh KumarNo ratings yet
- Traversable Wormholes in (2+1) DimensionsDocument19 pagesTraversable Wormholes in (2+1) DimensionsmarinkoNo ratings yet
- L14 PDFDocument5 pagesL14 PDF張家維No ratings yet
- Vibrating Beam: XX PL y T EI KLDocument5 pagesVibrating Beam: XX PL y T EI KLconsultor9010No ratings yet
- Stress Fields Around DislocationsDocument38 pagesStress Fields Around Dislocationswinter_snow714No ratings yet
- APhO 2017 Theory 1 SolutionDocument18 pagesAPhO 2017 Theory 1 SolutionmpecthNo ratings yet
- Pertamina GeothermaDocument6 pagesPertamina GeothermaMhbackup 001No ratings yet
- Stability Analysis of Rectangular CCSS and CCCS Isotropic Rectangular Plates Using 3rd Order Energy FunctionalDocument13 pagesStability Analysis of Rectangular CCSS and CCCS Isotropic Rectangular Plates Using 3rd Order Energy FunctionalEmmanuel ObaNo ratings yet
- Engineering Tripos Part IIB Module 4A10 Flow InstabilityDocument39 pagesEngineering Tripos Part IIB Module 4A10 Flow InstabilityHassanImranNo ratings yet
- POTD 266: Arhaan September 11, 2020Document3 pagesPOTD 266: Arhaan September 11, 2020Obama binladenNo ratings yet
- Review of Stress Strain Due To FlexureDocument5 pagesReview of Stress Strain Due To FlexureIhab SorourNo ratings yet
- Machine Design MD by S K Mondal T&Q.0001Document70 pagesMachine Design MD by S K Mondal T&Q.0001Thalari AdithyaNo ratings yet
- Machine Design MD by S K Mondal T&QDocument263 pagesMachine Design MD by S K Mondal T&QHamdy HassanNo ratings yet
- حل المسائل کتاب مکانیک و شکل دهی فلزات رابرت کدل و ویلیام هاسفورد - ویرایش سوم-1Document3 pagesحل المسائل کتاب مکانیک و شکل دهی فلزات رابرت کدل و ویلیام هاسفورد - ویرایش سوم-1hamedNo ratings yet
- Elastoplastic Constitutive Model For Unsaturated Soil-Steel InterfaceDocument6 pagesElastoplastic Constitutive Model For Unsaturated Soil-Steel InterfaceUmed Abd-alsatarNo ratings yet
- Influence of Rib Stiffeners On The Buckling Strength of Elastically Supported TubesDocument9 pagesInfluence of Rib Stiffeners On The Buckling Strength of Elastically Supported TubesWaseem AkramNo ratings yet
- Elastic. 2, SchaumDocument1 pageElastic. 2, SchaumOscar RojasNo ratings yet
- Lecture4 2017Document37 pagesLecture4 2017Tesfaye Utopia UtopiaNo ratings yet
- State-Of-The-Art of Research On Seismic Pounding Between Buildings With Aligned SlabsDocument24 pagesState-Of-The-Art of Research On Seismic Pounding Between Buildings With Aligned SlabsRui CbNo ratings yet
- On The Low Frequency Elastic Response of A Spherical ParticleDocument8 pagesOn The Low Frequency Elastic Response of A Spherical ParticlesteveNo ratings yet
- Shankar ErrataDocument3 pagesShankar ErrataJuan CapellaNo ratings yet
- 1965 - Cook - The Failure of RockDocument15 pages1965 - Cook - The Failure of RockIgnasi AliguerNo ratings yet
- Explosion of Infinite Straight SolenoidDocument4 pagesExplosion of Infinite Straight SolenoidIbilcemNo ratings yet
- MIT5 Chem Lec 6Document8 pagesMIT5 Chem Lec 6maggiesszzNo ratings yet
- ClutchDocument14 pagesClutchIwan CahyonoNo ratings yet
- ϕ (r) = −E r− a r: 8 Jacob Lewis BourjailyDocument2 pagesϕ (r) = −E r− a r: 8 Jacob Lewis BourjailyHeber AndradaNo ratings yet
- Junction of A Periodic Family of Elastic Rods With A Thin Plate. Part IIDocument55 pagesJunction of A Periodic Family of Elastic Rods With A Thin Plate. Part IIChristian MBOULLENo ratings yet
- Problems 13-14 Castigliano's MethodDocument5 pagesProblems 13-14 Castigliano's MethodCarl CrawfordNo ratings yet
- Asymptotic Limits and Sum Rules For Gauge Field PropagatorsDocument11 pagesAsymptotic Limits and Sum Rules For Gauge Field PropagatorsYeimy Vivar LobosNo ratings yet
- Physics 9702 Paper 4Document32 pagesPhysics 9702 Paper 4Alvin VictorNo ratings yet
- Energy Methods: MAE 314 - Solid Mechanics Y. ZhuDocument15 pagesEnergy Methods: MAE 314 - Solid Mechanics Y. ZhufabukeNo ratings yet
- Allied Physics - I (17upha01)Document94 pagesAllied Physics - I (17upha01)Bharathi MathsNo ratings yet
- ME-311 Machine Design - Lecture 7Document16 pagesME-311 Machine Design - Lecture 7Muhammad Zun Nooren BangashNo ratings yet
- Bili Near HysteresisDocument5 pagesBili Near HysteresisMauricio_Vera_5259No ratings yet
- 2.1 Shear Force - Stress and StrainDocument15 pages2.1 Shear Force - Stress and StrainTooling ganesh0% (1)
- OFF-Axis Mechanical Properties of FRP CompositesDocument6 pagesOFF-Axis Mechanical Properties of FRP CompositesSabin RautNo ratings yet
- 1999 - Evaluation of The Stress Intensity Factor For Cracks in ElastomersDocument4 pages1999 - Evaluation of The Stress Intensity Factor For Cracks in ElastomersArun KumarNo ratings yet
- Jee Advanced Previous Year Paper Class 12 Physics 2022 Paper 2 Doubtnut English MediumDocument34 pagesJee Advanced Previous Year Paper Class 12 Physics 2022 Paper 2 Doubtnut English Mediumvivekanandnand64No ratings yet
- Chapter Three: Kinetics of ParticlesDocument71 pagesChapter Three: Kinetics of Particlesyohannes lemiNo ratings yet
- On The Shape Factor For The Maximum Pressure of The Undercut Groove FormDocument8 pagesOn The Shape Factor For The Maximum Pressure of The Undercut Groove FormVanesh KumarNo ratings yet
- Analytical: ExplanationsDocument9 pagesAnalytical: ExplanationsL.ABHISHEK KUMARNo ratings yet
- Machine Design MD by S K Mondal T&QDocument263 pagesMachine Design MD by S K Mondal T&QSatish Kumar100% (2)
- Uhorwfvnuohrafvn 8 Honvrf 8 UDocument24 pagesUhorwfvnuohrafvn 8 Honvrf 8 Uk24xnzp2qyNo ratings yet
- Problemset 3 ADocument6 pagesProblemset 3 AUnnamed1122No ratings yet
- Mohara M 1980Document6 pagesMohara M 1980React PatrolNo ratings yet
- Beam DeflectionDocument3 pagesBeam DeflectionChrysler DuasoNo ratings yet
- AG 18420 Penguard Pro GF Euk GBDocument12 pagesAG 18420 Penguard Pro GF Euk GBaandueza_1No ratings yet
- Fender Systems Ver3 - 9Document5 pagesFender Systems Ver3 - 9aandueza_1No ratings yet
- TLE2015 05TekmarineCatalogueR001cDocument18 pagesTLE2015 05TekmarineCatalogueR001caandueza_1No ratings yet
- USNS Bob Hope Class in BremertonDocument1 pageUSNS Bob Hope Class in Bremertonaandueza_1No ratings yet
- Drafts - Concrete - Nov 24, 2021Document8 pagesDrafts - Concrete - Nov 24, 2021aandueza_1No ratings yet
- XLF60 Owners Manual 1Document78 pagesXLF60 Owners Manual 1aandueza_1No ratings yet
- ABS RECORD, The Online Database For ABS Vessel Records, Lists All Vessels and Offshore Installations in Class With ABS, Including Class NotationsDocument3 pagesABS RECORD, The Online Database For ABS Vessel Records, Lists All Vessels and Offshore Installations in Class With ABS, Including Class Notationsaandueza_1No ratings yet
- Newapps HughesDocument16 pagesNewapps Hughesaandueza_1No ratings yet
- Evaluate The Cylindrical Rubber Fender Response Under Dynamic LoadDocument5 pagesEvaluate The Cylindrical Rubber Fender Response Under Dynamic Loadaandueza_1No ratings yet
- GD-APS FutureWaves Oceans2016Document9 pagesGD-APS FutureWaves Oceans2016aandueza_1No ratings yet
- Duralprep A.C.: Bonding Agent and Anti-Corrosion CoatingDocument2 pagesDuralprep A.C.: Bonding Agent and Anti-Corrosion Coatingaandueza_1No ratings yet
- ABS RECORD, The Online Database For ABS Vessel Records, Lists All Vessels and Offshore Installations in Class With ABS, Including Class NotationsDocument3 pagesABS RECORD, The Online Database For ABS Vessel Records, Lists All Vessels and Offshore Installations in Class With ABS, Including Class Notationsaandueza_1No ratings yet
- 1 Input Data: WWW - Hilti.usDocument6 pages1 Input Data: WWW - Hilti.usaandueza_1No ratings yet
- 1 Input Data: WWW - Hilti.usDocument7 pages1 Input Data: WWW - Hilti.usaandueza_1No ratings yet
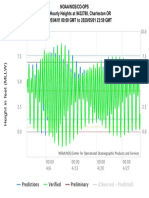
- Predictions Verified Preliminary: (Observed - Predicted)Document1 pagePredictions Verified Preliminary: (Observed - Predicted)aandueza_1No ratings yet
- Emerging Projects-Austin.: Prominent Development Projects in Planning or Construction Phases in and Around AustinDocument47 pagesEmerging Projects-Austin.: Prominent Development Projects in Planning or Construction Phases in and Around Austinaandueza_1No ratings yet
- CFR 2011 Title49 Vol3 SubtitleBDocument626 pagesCFR 2011 Title49 Vol3 SubtitleBmgmqroNo ratings yet
- Cell Biology: Science Explorer - Cells and HeredityDocument242 pagesCell Biology: Science Explorer - Cells and HeredityZeinab ElkholyNo ratings yet
- August 19-23 Lesson PlanDocument1 pageAugust 19-23 Lesson Planapi-282162606No ratings yet
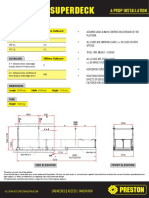
- SuperDeck All ModelsDocument12 pagesSuperDeck All Modelsarthur chungNo ratings yet
- VSF2 ND EdDocument345 pagesVSF2 ND EdRyanNo ratings yet
- Case StudyDocument6 pagesCase Studyzaid bin shafiNo ratings yet
- SampleDocument43 pagesSampleSri E.Maheswar Reddy Assistant ProfessorNo ratings yet
- Hana Table PartitioningDocument12 pagesHana Table PartitioningGowri Prasanth Chaduvula0% (1)
- Money ComponentsDocument10 pagesMoney ComponentsArifa AkterNo ratings yet
- 50TPD Soybean Oil Batch Type Solvent Extraction PlantDocument4 pages50TPD Soybean Oil Batch Type Solvent Extraction PlantKenan KardasNo ratings yet
- Ball BearingsDocument31 pagesBall Bearingsnike_y2kNo ratings yet
- 3M Fire Barrier, Fire Protection & Fire Stopping ProductsDocument3 pages3M Fire Barrier, Fire Protection & Fire Stopping ProductsOtto BorgesNo ratings yet
- Converting CLOBs 2 VARCHARDocument15 pagesConverting CLOBs 2 VARCHARMa GicNo ratings yet
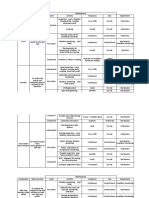
- Maintenance Component Main Function Level Activity Frequency Line DepartmentDocument7 pagesMaintenance Component Main Function Level Activity Frequency Line DepartmentBarathNo ratings yet
- A Geometry Surveying Model and Instrument of A Scraper Conveyor in Unmanned Longwall Mining FacesDocument9 pagesA Geometry Surveying Model and Instrument of A Scraper Conveyor in Unmanned Longwall Mining FacesEviNo ratings yet
- J Lithos 2018 02 011Document52 pagesJ Lithos 2018 02 011Warwick HastieNo ratings yet
- EMDCSS DatasheetDocument5 pagesEMDCSS DatasheetHoracio UlloaNo ratings yet
- HKV-8 Valve Catalog SPLRDocument128 pagesHKV-8 Valve Catalog SPLRCabrera RodriguezNo ratings yet
- 16 Astral - Pool Heating 2008Document38 pages16 Astral - Pool Heating 2008drožmanićNo ratings yet
- A Generic Circular BufferDocument3 pagesA Generic Circular BufferSatish KumarNo ratings yet
- Unit 7 Motion Review Sheet AnswersDocument3 pagesUnit 7 Motion Review Sheet AnswersFlorie Fe Rosario Ortega100% (1)
- Rationalizing The Seismic Coefficient Method PDFDocument41 pagesRationalizing The Seismic Coefficient Method PDFandremr15100% (1)
- Test 4: GRE Real 19Document6 pagesTest 4: GRE Real 19rdrprsdm2640No ratings yet
- Bread and Pastry ProductionDocument9 pagesBread and Pastry Productionwhite newgatesNo ratings yet
- Curved Path of Electron A B: ST Mary's College 1Document5 pagesCurved Path of Electron A B: ST Mary's College 1elsie limNo ratings yet
- Genetic Variability and Correlation Studies in Okra (Abelmuschus Esculentus (L) Moench)Document67 pagesGenetic Variability and Correlation Studies in Okra (Abelmuschus Esculentus (L) Moench)rajsign5100% (3)
- Tesp12205pi R1Document36 pagesTesp12205pi R1arabsniperNo ratings yet
- Experimental Study of Estimating The Subgrade Reaction ModulusDocument6 pagesExperimental Study of Estimating The Subgrade Reaction ModulusIngeniero EstructuralNo ratings yet
- Calculate Quantities of Materials For Concrete - Cement, Sand, AggregatesDocument7 pagesCalculate Quantities of Materials For Concrete - Cement, Sand, Aggregatesvenkateswara rao pothinaNo ratings yet
- Simultaneous Equations - Word ProblemsDocument27 pagesSimultaneous Equations - Word ProblemsSandy Wong0% (1)