You might also like
- Citation XL AfmDocument402 pagesCitation XL AfmJonathan Parra94% (16)
- Airbus Flight Control Laws: The Reconfiguration LawsFrom EverandAirbus Flight Control Laws: The Reconfiguration LawsRating: 4.5 out of 5 stars4.5/5 (16)
- MA 3703 AY 14 S1 Quiz 1 SolutionDocument5 pagesMA 3703 AY 14 S1 Quiz 1 SolutionFeeling_so_flyNo ratings yet
- Chapter 5Document355 pagesChapter 5manikandan_murugaiah100% (4)
- A Dynamic Stability Rocket SimulatorDocument16 pagesA Dynamic Stability Rocket SimulatorĐăng Khôi TrầnNo ratings yet
- SPC409 - Sheet - 1 - Tut01 S22Document7 pagesSPC409 - Sheet - 1 - Tut01 S22salmaelbaikNo ratings yet
- Lab 7 DraftDocument22 pagesLab 7 Draftapi-252392235No ratings yet
- Final Physics Rocket ReportDocument10 pagesFinal Physics Rocket Reportapi-249141434No ratings yet
- Aircraft Stability ExplainedDocument36 pagesAircraft Stability ExplainedRezwan Ahmed KhanNo ratings yet
- The Pilots Manual Ground School All The Aeronautical Knowledge Required To Pass The Faa Exams and Operate As A Private and Commercial Pilot The Pilots Manual Series Book 2 EbDocument62 pagesThe Pilots Manual Ground School All The Aeronautical Knowledge Required To Pass The Faa Exams and Operate As A Private and Commercial Pilot The Pilots Manual Series Book 2 Ebblanche.karsten96597% (32)
- AE1222-II Formula Sheet Aircraft Design Version 25-3-2021Document4 pagesAE1222-II Formula Sheet Aircraft Design Version 25-3-2021daniel dusNo ratings yet
- Manual M4A1 King ArmsDocument10 pagesManual M4A1 King ArmsVinicius AraújoNo ratings yet
- Low-Speed StabilityDocument3 pagesLow-Speed StabilityAasto Ashrita AastikaeNo ratings yet
- Stability and Control: Outline of This ChapterDocument21 pagesStability and Control: Outline of This ChaptergarridolopezNo ratings yet
- Longitudinal Static StabilityDocument6 pagesLongitudinal Static StabilitySerdar BilgeNo ratings yet
- Empennage Sizing and Aircraft Stability Using MatlabDocument37 pagesEmpennage Sizing and Aircraft Stability Using MatlabRoxana VoicuNo ratings yet
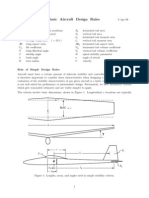
- Basic Aircraft Design RulesDocument8 pagesBasic Aircraft Design RulesAbdelrahman Nassif100% (1)
- Longitudinal Static Stability: Program Studi Teknik Penerbangan Sekolah Tinggi Teknologi Adisutjipto 2016Document27 pagesLongitudinal Static Stability: Program Studi Teknik Penerbangan Sekolah Tinggi Teknologi Adisutjipto 2016Alrino Dwi PrasetyoNo ratings yet
- ASC 1 DrAPDocument32 pagesASC 1 DrAPupamnyu KalburgiNo ratings yet
- Stability of A JetstreamDocument9 pagesStability of A JetstreamNahid Latona100% (1)
- ASC-mod 2-Static Longitudinal Stability and ControlDocument11 pagesASC-mod 2-Static Longitudinal Stability and ControlSwaroop AcharyaNo ratings yet
- ASC-mod 2-Static Longitudinal Stability and Control - Stick FreeDocument11 pagesASC-mod 2-Static Longitudinal Stability and Control - Stick FreeSwaroop AcharyaNo ratings yet
- Flight Dynamics AE3-302 ExercisesDocument12 pagesFlight Dynamics AE3-302 ExercisesDomenico VerbicaroNo ratings yet
- Aerodynamic tail design cross-checksDocument7 pagesAerodynamic tail design cross-checksKunhu MonuNo ratings yet
- Ada319977 PDFDocument53 pagesAda319977 PDFTeFa DiazNo ratings yet
- PoF 8 Static and Dynamic StabilityDocument63 pagesPoF 8 Static and Dynamic StabilityglorfindelptNo ratings yet
- 6523dcf34117a3efd9843f42 BexalumajaruvofuDocument2 pages6523dcf34117a3efd9843f42 Bexalumajaruvofuheris.indNo ratings yet
- Linear Aerodynamics VLM Wing DesignDocument22 pagesLinear Aerodynamics VLM Wing DesignAshutosh VermaNo ratings yet
- Aircraft stability and control tutorial problemsDocument14 pagesAircraft stability and control tutorial problemsAzraie Bin RuslimNo ratings yet
- AsDocument7 pagesAsGogo P0% (1)
- Linear Aerodynamic Wing DesignDocument18 pagesLinear Aerodynamic Wing DesignAshutosh VermaNo ratings yet
- Static Longitudinal Stability and ControlDocument19 pagesStatic Longitudinal Stability and Controlpullu p joseNo ratings yet
- Flight Mechanics - Part 2Document29 pagesFlight Mechanics - Part 2Muhamad ShafiqNo ratings yet
- Aircraft StabilityDocument126 pagesAircraft StabilitymunirnadirNo ratings yet
- Assignment #2Document1 pageAssignment #2abood kh7No ratings yet
- Background On Aircraft AerodynamicsDocument8 pagesBackground On Aircraft AerodynamicsAbdelrahman NassifNo ratings yet
- Aca Module-1 ChatgptDocument25 pagesAca Module-1 Chatgpt20951a2141No ratings yet
- Aircraft SteeringDocument5 pagesAircraft SteeringAnonymous LtvdduNo ratings yet
- Concept of Trimmed FlightDocument16 pagesConcept of Trimmed FlightKumarGuglothNo ratings yet
- Design of Uav and Mav End-Term PresentationDocument25 pagesDesign of Uav and Mav End-Term PresentationGopesh KrishnaNo ratings yet
- FLIGHT DYNAMICS EXAM RESULTSDocument9 pagesFLIGHT DYNAMICS EXAM RESULTSAkshay KulkarniNo ratings yet
- Aerodynamics and The Stability of AircaraftDocument33 pagesAerodynamics and The Stability of AircaraftMohd Rozi Mohd PerangNo ratings yet
- Is There A Way To Estimate The Drag Coefficient Using Thin Airfoil TheoryDocument6 pagesIs There A Way To Estimate The Drag Coefficient Using Thin Airfoil TheorychiragNo ratings yet
- Flight Test Report (Discussions) s204948 PDFDocument14 pagesFlight Test Report (Discussions) s204948 PDFZohair RafiqNo ratings yet
- CG On MEAN AERODYNAMIC CHORDDocument5 pagesCG On MEAN AERODYNAMIC CHORDalsinani99.000No ratings yet
- Airfoil and Geometry Selection GuideDocument93 pagesAirfoil and Geometry Selection GuideEmine ÇağlarNo ratings yet
- 01 045 FDSDocument10 pages01 045 FDSJaveria NaseemNo ratings yet
- Contribution 2991Document10 pagesContribution 2991FrkanNo ratings yet
- Experiment 1Document17 pagesExperiment 1Jesus UrbanejaNo ratings yet
- Introduction To UAV Systems, 4 EdDocument15 pagesIntroduction To UAV Systems, 4 EdN BHUSHANNo ratings yet
- Aerodynamic Analysis Using XFLR-5Document12 pagesAerodynamic Analysis Using XFLR-5Alejandro García González100% (1)
- Aircraft Dynamics and SimulationDocument13 pagesAircraft Dynamics and SimulationTapan DasNo ratings yet
- 029 - Chapter 6 - L21Document12 pages029 - Chapter 6 - L21Mardav PanwarNo ratings yet
- Gate Flight Mechanics by VayushastraDocument36 pagesGate Flight Mechanics by Vayushastraudaykumar100% (4)
- Introduction - 3 Topics: Flight Dynamics-I Prof. E.G. Tulapurkara Chapter-1Document6 pagesIntroduction - 3 Topics: Flight Dynamics-I Prof. E.G. Tulapurkara Chapter-1alysonmicheaalaNo ratings yet
- Trim SolutionDocument40 pagesTrim Solutionendoparasite100% (1)
- Aircraft Stability and Control - Lec05Document14 pagesAircraft Stability and Control - Lec05Akeel AliNo ratings yet
- AircraftDesign 9 EmpennageGeneralDesignDocument16 pagesAircraftDesign 9 EmpennageGeneralDesignBart Siwiec ZygmuntNo ratings yet
- Nanyang Technological University: School of Mechanical and Aerospace EngineeringDocument12 pagesNanyang Technological University: School of Mechanical and Aerospace Engineeringsnick_the_vickNo ratings yet
- Basic Aerodynamics: Section 6Document10 pagesBasic Aerodynamics: Section 6dkdk44100% (1)
- 19AEE301 CA3 4 QP 2023Document3 pages19AEE301 CA3 4 QP 2023gnsvaravishwas03No ratings yet
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- Cooperative Control of Multi-Agent Systems: Theory and ApplicationsFrom EverandCooperative Control of Multi-Agent Systems: Theory and ApplicationsNo ratings yet
- Gaensslen TB CH04Document9 pagesGaensslen TB CH04JoeyNo ratings yet
- POF: Principles of FlightDocument18 pagesPOF: Principles of FlightMoslem Grimaldi100% (2)
- Space Exploration TimelineDocument26 pagesSpace Exploration TimelineKristine BarredoNo ratings yet
- Rifle Recoil TableDocument16 pagesRifle Recoil TableDale WadeNo ratings yet
- Def Tact 222 BDocument37 pagesDef Tact 222 BKiahna Clare ArdaNo ratings yet
- Module 12.1 Page 21-40Document20 pagesModule 12.1 Page 21-40NI OMINo ratings yet
- POLAND Rifle SquadDocument2 pagesPOLAND Rifle SquadAleksander GawrońskiNo ratings yet
- How Satellites Orbit and Their Key ComponentsDocument12 pagesHow Satellites Orbit and Their Key Componentsizaias jrNo ratings yet
- HR1808Document128 pagesHR1808Jeremy TurleyNo ratings yet
- Assessment of An Inviscid Euler-Adjoint Solver For Prediction of Aerodynamic Characteristics of The NASA HL-20 Lifting BodyDocument21 pagesAssessment of An Inviscid Euler-Adjoint Solver For Prediction of Aerodynamic Characteristics of The NASA HL-20 Lifting BodydanalmNo ratings yet
- The Insider's Gun and Ammo Buying SystemDocument8 pagesThe Insider's Gun and Ammo Buying Systemvihkr9506No ratings yet
- Ammunition Handbook Ver 6 2021Document189 pagesAmmunition Handbook Ver 6 2021ibrahim sugar100% (3)
- Aerodynamics - Selected Topics in The Light of Their Historical Development - PDF RoomDocument226 pagesAerodynamics - Selected Topics in The Light of Their Historical Development - PDF RoomАндрей Пятыгин100% (1)
- Siyensikula ScriptDocument3 pagesSiyensikula ScriptJay PasajeNo ratings yet
- Maintenance DocumentationDocument13 pagesMaintenance DocumentationpannNo ratings yet
- FN Herstal - FN Scar 20s NRCH Om FinalDocument58 pagesFN Herstal - FN Scar 20s NRCH Om FinalRicardo C TorresNo ratings yet
- October Sky Viewing QuestionsDocument3 pagesOctober Sky Viewing Questionsapi-263138429No ratings yet
- Semper ViperDocument100 pagesSemper ViperJDoe DoesonNo ratings yet
- UAV AutoPilot PDFDocument6 pagesUAV AutoPilot PDFMococo CatNo ratings yet
- Question Paper CodeDocument3 pagesQuestion Paper Codesathesh waranNo ratings yet
- V-N DiagramDocument2 pagesV-N DiagramSuthan RNo ratings yet
- Pe4 NotesDocument19 pagesPe4 NotesSIBAYAN, ZANEA AYNNo ratings yet
- X-Plane New Manual PDFDocument210 pagesX-Plane New Manual PDFmailenable100% (1)
- C172 SOP June 2020Document13 pagesC172 SOP June 2020Peter Hoole-jacksonNo ratings yet