Professional Documents
Culture Documents
Geometria Analitica 2 Teoremas & Definições PDF
Uploaded by
Jimmy Bomfim de Jesus0 ratings0% found this document useful (0 votes)
11 views22 pagesOriginal Title
Geometria Analitica 2 Teoremas & definições.pdf
Copyright
© © All Rights Reserved
Available Formats
PDF or read online from Scribd
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
© All Rights Reserved
Available Formats
Download as PDF or read online from Scribd
0 ratings0% found this document useful (0 votes)
11 views22 pagesGeometria Analitica 2 Teoremas & Definições PDF
Uploaded by
Jimmy Bomfim de JesusCopyright:
© All Rights Reserved
Available Formats
Download as PDF or read online from Scribd
You are on page 1of 22
DefinicSo 1.1 (Coordenadas cartesianas no espaco)
‘Um sistema (ortegonal positivo) de coordenadas cartesianas no espago con-
siste da escolha de um ponto O do espago, denominado origem, e de trés retas
concorrentes em O e mutuamente perpendiculares, denominadas eiros OX,
OY €0Z, sob cada uma das quais h4 uma cépia da reta real R, satisfazendo
‘as seguintes propriedades:
(a) O zero de cada cépia de R considerada, coincide com o ponto O.
(b) Escolhamos duas dessas retas. As retas escolhidas determinam um plano
que passa pela origem O. Nesse plano, escolhemos uma das retas para ser
© cixo OX e a outra para ser o eixo OY. O plano que contém esses eixos é
denominado plano XY.
(©) Escolhamos um dos semi-eixos do eixo OX para ser o 0 semi-cixo OX
positive. No plano XY, o semi-eixo OY positivo 6 obtido pela rotagao de
90° do semi-eixo OX positivo, no sentido anti-hordrio, em tomo da origem.
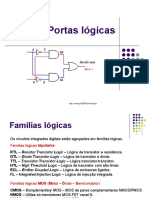
(d) A terceira reta, perpendi- Z
cular ao plano XY e que passa
pela origem, 60 eixo OZ. Nela,
© semi-eixo OZ positivo 6 es
colhido de modo que se um
observador em pé na origem z ,
sobre o plano XY’, com as costas
apoiadas no semi-eixo OZ po-
sitive e 0 braco direito esti Figura 1.3: Escolha do semi-cixo OZ posi-
cado na diregio do semi-cixo tivo,
OX positivo, verd 0 semi-cixo
OY positivo A sua frente (Figura 1.3).
Em relagio a um sistema de coordenadas cartesianas OXY Z, cada
ponto P do espaco é caracterizado por um terno de mimeros reais (x,y, 2)
denominados as coordenadas do ponto P no sistema OXYZ.
Convengio
Daqui em diante, um ponto P que tem abscissa 1, ordenada y € cota = seré
identificado com seu temo de coordenadas eartesianas (1, y,2)
P
Y2)
Observagio
Os planos eartesianos sio caracterizados da seguinte maneira:
Txy = {(z,¥, 0), y €R}, Mxz = {(2,0,2)|z,2 € R} eMyz = {(0,y, 2)ly.2 €R}
Isto 6, dado um ponto P
P ely =
Pelxz ry
Pellyz a
(x, y,2) wo espago, temes:
D, portanto, a equacio cartesiana de yy &:
0, portanto, a equac
cartesiana de Iyz & y
0, portanto, a equac&o cartesiana de yz & «= 0.
Com esta caracterizagio dos planos cartesianos, vemos que o ¢ixo OX’
consiste nos pontos tais que y = 0 ¢ z= 0, isto &:
OX = Ixy MIlyz ¢ suas equagdes cartesianas so {
Analogamenti
OY =Tyy MMyz = { e OZ =TxzNIlyz: {
=0
A distancia no espago
Em relagio a um sistema ortogonal de coordenadas cartesianas OXYZ,
a distincia entre Py = (1,y1,21) € Ps = (2,42, 22) 6 0 mtimero real nio-
negative:
Py, Pa) = Ve — 22? + (1 — 9)? + = 22)” (24)
Observacio
As propriedades da distincia no plano que conhecemos do Médulo 2 do Pré-
Céleulo continuam validas para a distancia no espago. Enuneiamos esas
propriedades apenas para fazer mais completa a nossa explanagéo:
Propriedades da distancia,
Sejam P,Q e R pontes do espago. Endo:
A d(P,Q)>0.
B.d(P,Q)=0 => P=Q.
C d(P,Q) = d(Q,P).
D. d(P,R) < d(P.Q) + d(Q. R) (desigualdade triangular).
£(Po.r): (a ~ ta)? + (y~ w)? + (2-2) =P (22)
Definigio 2.2
Seja E(Po,r) a esfera de centro no ponto Py e raio r e seja P um ponto
no espago, Dizemos que P & um ponto interior a £(Py.r), se (P,P) r dizemes que P é um ponto exterior a E(Py.7).
Proposicio 2.1
Sejam 5, ¢ Sp esferas centradas em A, € Ap de raios Ry > Oe Ry > 0,
respectivamente, e seja L =d(Ay, A,). entio,
a. SiMS2 = @ se, esomente se, L > Ri+Rz0u Ry > Ry+Lou Ry > Ro+L.
b. S:MS» é um tinico ponto se, ¢ somente se, Fi + Ry = Lou Ry +L = Ry
eL>0ouR,+L=ReLl>0.
©. $1152 é uma cireunferéneia se, ¢ somente se, L-< Ri + Ro, Ry < Rit L
eR Ry =
SINS, = 2 => Ry < |;
SMS, 6 uma cireunferéneia => Ry > |2|
Observacio
Se AB e CD tém sentidos opostos e A # C, entio Pg Pp é a resitio do
plano I limitada pelas retas r e s. No entanto, se A= C, Pa Pp =
© comprimento ou médulo |AB| de um segmento AB é a distancia do
ponto A ao ponto B.
Como d(A, B) = d(B, A), temos que |AB| = |R Al.
De posse dos conceitos de direcio, sentido e médulo, estamos prontos
para classificar os segmentos orientados no espace por meio da relagio de
equipoléncia, como fizemos na Aula 1, do Médulo 1. Comegamos redefinindo
a relagio de equipolencia de segmentos no espacp.
Definigdo 3.3 (Segmentos equipolentes)
Dois segmentos orientados no espago so equipolentes quando tém a mesma
diregio, o mesmo sentido ¢ 0 mesmo médulo (veja a Figura 3.42).
Se os segmentos orientados AB © CD sio equipolentes, escrevemos
AB = CD. Caso contrétio, escrevemos AB # CD.
Como dois segmentos equipolentes ou sic colineares ou esto contic
dos em retas paralelas (¢ portanto sio coplanares), 0 seguinte critério de
equipoléneia que wsamos no plano continua vélido com a mesma demon-
stragHo feita na Aula 1, do Médulo 1.
Proposigio 3.2
Sejam A, B,C e D pontos do espaco, entio:
AB=CDs
somente se, AD e BC possuem 0 mesmo ponto médio
A caracterizagio geoméirica da equipoléucia dada na Proposigio 3.2 6
complementada com a Proposigio 3.3, que estabelece que qualquer ponte do
espaco € origem de um segmento equipolente a um segmento dado.
Proposigio 33
Se AB é um segmento orientado e C & um ponto do espaco, entio apenas
‘um segmento orientadlo com origem em C' é equipolente a AB.
Convencio
‘Um segmento AB, onde A = B, é chamado um segmento nulo. Os segmentos,
nulos tém médulo zero © nao tém diregio nem sentido. O segmeato nulo de
origem e extremidade A se designa por AA, ¢ todos os seamentos nulos sio
considerados equipolentes.
Consideremos, agora, um sistema ortogonal de coordenadas cartesianas
OXYZ no espaco em relagio ao qual os pontos sio identificados por suas
coordenadas.
Proposicao 3.4
Sejam A= (ay, 43.05), B = (bysb.bs), C
pontos do espaco, entiio:
AB = CD = (by — a1, by — a9, bs — as) = (di — €1, da — €2, ds — 3)
C63) © D = (dyedyds)
A relagéo de equipoléncia entre segmentos do espaco & (como a relagio
de equipoléncia no plano) uma relagio de equivaléncia, isto 6, a relagio sae
tisfuz as seguintes propriedades:
Reflexiva. Todo segmento orientado é equipolente a si préprio,
Simétrica. Se AB = CD, entio CD = AB.
Transitiva. Se AB = CD e CD = EF, entio AB = EF.
Definigo 3.4 (Vetor no espago)
Um vetor no espago é a colegio de todos os segmentos orientados do espaco
equipolentes a um segmento orientado dado.
Notagio
Se AB 6 um segmento orientado, designamos por AB’ o vetor que consiste
de todos os segmentos orientados equipolentes a AB. Qualquer segmento
orientado equipolente a AB é chamado wm representante do vetor AB’. Os
votores sito também escritos tsando letras mintiseulas com uma flocha, como
7.5.7 ete. Temos:
AB =CD se, ¢ somente se, AB’
Além disso, da Proposi¢io 3.3, obtemos:
Dados um vetor @ eum ponto A do espago, existe um Yinieo ponto B do
espaco, tal que 7 = AB
Os vetores no espaco sio representados em termos de coordenadas da
mesma forma que os vetores no plano:
Definico 3.5 (Coordenadas de um vetor no espaco)
(a1, a2, a3) e B = (b1,b2, bs) sio pontos do espaco, dadas em termos de
coordenadas em relac&o a um sistema ortogonal de coordenadas cartesianas
OXYZ, entio, as coordenadas de @ = 1B
= (bi = a4, by — 09,03
= as)
Definigdo 3.6 (AdicSo de vetores)
Sejam a’ e 5” vetores no espaco, A um ponto qualquer no espago, AB o
representante de @” com origem no ponto Ae BC’ 0 representante de B” com
origem no ponto B. O vetor soma de @ e D, designado por 7 + 0,60
vetor representado pelo segmento orientado AC:
w4+0 =4B +BC =AC
Na pritica, a soma de dois vetores é feita em termos de um sistema
ortogonal de coordenadas cartesianas, por meio da seguinte definigfo:
Coordenadas do vetor soma
As coordenadas do vetor soma sio abtidas son
pectivas das parcelas. Isto 6, se a” = (r1,%1,21) eB
T+0 = (ten tha +2)
wd as coordenadas res
(2. yo, 2), ento:
Propriedades da adigio de vetores no espaco
A operagio de adigio de vetores no espago possi as mesmas pro-
priedades que a operagio de adigio de vetores no plano, herdadas também
das correspondentes propriedades da adicfio de niimeros reais.
Scjam 7, 0 7 vetores quaisquer no espaco.
1. Propriedade comutativa 7 +0 =F +7.
2. Elemento neutro: O vetor nulo, que designamos por 0, é 0 vetor
representado por qualquer segmento nulo. Em termos de coontenadas, temos
T = (0.0.0).
O vetor nalo € 0 tinico vetor que satisfaz: T +0 =7.
3. Blemento inverse: Dado um vetor @, existe um vetor que desig-
‘namos por ~@ € chamamos o simétrico de @, tal que: 7 +(-7)= 7
4. Propriedade associative: A adigéio de vetores é associativa. Isto é,
dados trés vetores @, Ve, temos: (W +0) +7 =7+(b 47)
Defnigéo 3.7 (Multipicacio de escalares por vetoes) _
Se AB’ é um vetor do exspago ed € R, entio o produto de d por AB’ 6 0
voter AB” = \. 7B’, onde 03 pontos A, B ¢ BY sio colineares ¢ satisfazem:
|AB'| = d(A, BY) = [A] -d(A, B) = [A - |ABI.
As propriedades
L. Associativa: -(p-7)
A+
O+n-
3. Bristéncia de neutro multiplicativo: 1.7 = 7 ;
so vélidas para quaisquer vetores @, be T do espago € quaisquer Xp € R.
Definigao 4.8
Sejam 7 e B vetores do espaco. O vetor b é um muiltiplo de @ quando
existe um escalar A € R, tal que 5” = Aa’.
2. Distributivas: {
Observagio
a. Todo vetor & miiltiplo de si préprio (basta tomar A = 1).
b. O vetor zero (0) é miiltiplo de qualquer vetor, de fato, dado um vetor
7 qualquer, temos 0” = 07". No entanto, nenlumn vetor ndonnulo pode ser
aniiltiplo de 0,
co SeT4¢T. FAT ed
mente, diferente de zero.
d. Se @ =(x4,y1,21) € B= (co, yp, 2), entio: B= AT se, e somente se,
(22, yo, 22) = A(t1, 41,21) = (As, Msn, Azi), OU Seja, Se, e somente se,
lo
7, entaio 7 = =F, pois d 6, necessariae
x
=n, wedn, 2=da. (49)
Proposi¢io 4.5
Se = (21,y.21) € © = (x2,yp.22) so vetores do espago, entio Fé
ntltiplo de @ se, e somente se,
We — Liye = 1221 — Ti = wa m2 = 0.
Definicio 4.9
Os vetores a € 5” so colincares quando um deles € miiltiplo do outro. Isto
6 existe NER, tal que, 7 =A ou b= Az’.
Propasigio 4.6
Sejam A, B e C pontos niio-colineares do espago ¢ seja Tape 0 (tinico) plano
que os contém, Um ponto D pertence ao plano Tage se, e somente se, 0
vetor AD’ & soma de miiltiplos dos vetores AB’ e AC” Isto 6
DE Tlasc <> existem escalares r,s €R, tais que AD =rAB +sAC’.
Defnicio 4.10
‘Tres vetores 7 = AB’, iy’ = AC’ eG = AD’ sav chamattos linearmente
dependentes (LD), quando os pontos A, B, Ce D sko coplanares. Caso
contritio, dizemos que os vetores sio linearmente independentes (LI).
Observacio
a. Pela proposicéio 4.6, os vetores 0", i e ij” sio LD quando existem
escalares a ¢ 8, tais que iy” = az” + 3%".
b. Trés vetores niio-nulos tj", dy’ € Oy" siio LI quando no existem escalares
a © 8, tais que Ty = aii’ + BH. Isto 6, TH e TH so vetores LI se, €
somente se, a identidade
é vélida apenas quando a = 9 ==
Teorema 4.1
Sejam i", i’ e iy trés vetores linearmente independentes no espaco.
Entio, para cada vetor i” do espago, existem escalates tinicos x,y,2 € Ry
tais que:
Wart tye +: (4.18)
Terminologia
‘Uma hase do espaco é um conjunto formado por trés vetores LI.
SeB = { ii", , 5’ } é uma base do espaco e 7 é um vetor qualquer,
sabemos, pelo Teorema 4.1, que existem escalares tinicos ar, y @ 2, tais que
WD =00F ty +25". Os mimeros x, y € z séo chamados coordenadas de
IF em relagio A base B, e escrevemes 7
= (2,y2)e
Considerando um sistema ortogonal de coordenadascartesianas OXY Z,
os vetores %” = (1,0,0), & = (0,1,0) e %° = (0,0,1) sio LI. A base
C = {&, &, } 6 chamada base candnica do espaco em relagho ao sis-
tema OXYZ. Note que, se as coordenadas de um vetor i em relagio a0
sistema OXY Z sio w= (x,y, 2), entio @ = 207" + yay + at". Por isso, as
coordenadas de i” no sistema OXYZ séo exatamente as coordenadas de 7
em relagio A base candnica do sistema OXYZ: W = (2.y,2) = (2.4. 2)o.
Equagées paramétricas de uma reta no espaco
Comegamos considerando um sistema ortogonal de eoordenadas earte-
sianas OXYZ no espago. Dados dois pontos distintos Ae B no espaco,
caracterizamos a reta r que os contém como sendo o conjunto dos pontos P
do espaco que sio colineares com Ae B.
Como vimos na Aula 4, 0 ponto P seri colinear com A e B se, esomente
se, 0 vetor AP’ for miltiplo do vetor AB’. Isto é, os pontos da reta r sé
carscterizados da seguinte maneita:
Pere AP
AB’ , para algum escalar | € B (5.19)
Lembrando que AP = OP — OA’, temos que AP = t AB’ equivale
a OP —OA =1AB’. isto 6a OP =O4 +tAB.
Convengio
Sabemos que, em relaco a um sistema ortogonal de coordenadas cartesianas
OXY Z, as coordenadas de um ponto Q sio exatamente as coordenadas do
vetor OG. Portanto, convencionamos em escrever apenas Q em se tratando
do vetor O@ . Desta forma podemos definir a adigdo de um ponto Q com um
vetor 7” como sendo a extremidade R (on o vetor OR’) da soma OQ +QR,
onde QR é um segmento representante do vetor 7” com origem no ponte Q.
DefinicSo 5.11
‘Duas retas uo espago que nio sio paralelas, nem coincidentes € nem concor
rentes sio chamadas reversas.
Definigao 6.12 (Angulo entre dois vetores do espaco)
Sejam 7 = AB’ ev = AC’ vetores do espago. O angulo de 7 para 3”, que
designamos (7°, 7’), é por definigéo o angulo de 7” para 7” medido no plano
Tlaze que contém os pontos A, B e C (veja a Figura 6.75). A medida do
ngulo (77, 7”) é a menor medida nao negativa do angulo entre as semi-retas.
AB e AC.
Definigo 6.13 (Norma de um vetor no espaco)
A norma ou comprimento de um vetor 7 do espago ¢ igual ao comprimento
de qualquer segmento representante de 7° e se designa por |Z")
Observagio
A norma definida para vetores do espago satisfaz as mesmas propriedades que
a norma definida para vetores do plano. Para lembrar mais especificamente,
listamos essas propriedades no seguinte destaque:
Propriedades da norma de vetores no espago
Sew’, 7” ew sio vetores do espago e 1 € R, temos:
© [fe] = 0, alm disso, jz] 0 7-7
eT] =D el
[2 +0] < lf] + [7] (desigualdade triangular).
Definicdo 6.14 (Produto interno entre vetores do espao)
O produto intemo de dois vetores 7” e 7” do espaco é o niimero reak
\7||- FI] costar, 7)
Proposico 6.7 (O produto interno usual em termos de coordenadas)
Sejam @ = (us, tz, us) © T = (v4, v2,03) vetores do espago expressos em.
termos de um sistema ortogonal de coordenadas cartesianas. Entao:
@7)=untmatun
Proposicio 6.8
Se B = (07°, 77.75") & uma base ortonormal do espago, entdo, as coordenadas
de um vetor qualquer @ do espaco, sao:
= (wi, we, ws)e = (WT), (WB), (WTS) w
ji¢do 7.15 (Vetor normal a um plano)
Sejam 77 um vetor ndo-nulo e TT um plano no espaco. Dizemos que 7 é um.
‘vetor normal ao plano TI e escrevemoe 7° L II, quando 7 & perpendicular a
qualquer vetor AB’ onde A, B € TI (Figura 7.83).
Proposicio 7.9
As equagies art+bytez=d e a'r+Vy+cz =a sho equagies
cartesianas de um plano II se, e somente se, existe uma constante \ € R,
0, tal que
d=\a, V=Xd, e
Proposicio 7.10
‘Seja TT o plano que pasa pelo ponto Fy e parslelo aos vetores LIZ” e 3.
Entio, um vetor 77° 6 normal a TI se, e somente se, 7” & perpendicular aos
vetores geradores i e 7.
Definicéo 8.16
Um referencial € do plano consiste na escotha de um ponto P) e dois ve-
tores linearmente independentes %° ¢ &’ no plano. Entdo, dizemos que
E = {Py.2.2%} é um referencial do plano com origem no ponto Py.
Definicio 8.17
‘Um referencial € = {Py:2%",%',@'} no espago consiste na escolha de um
ponto P), denominado origem, junto com a escolha de trés vetores linear-
meate independentes %’, &’ e %" no espaco de maneira ordenada. Isto 6,
num referencial deve ficar claro qual vetor é o primeiro da lista, qual é 0
segundo e qual 0 terceito.
Definicao 8.18
Seja OXYZ um sistema ortogonal de coordenadas cartesianas no espaco,
© referencial C = {0;47,&',G}, no qual |” = (1,0,0), & = (0,1,0)
© & = (0,0,1), 6 chamado referencial candnico associado ao sistema de
coordenadas OXY Z.
Convensa0
O referencial candnico mencionado na defingéo anterior (Figura 8.102) € de-
nominado positive, Qualquer referencial de mesma orientagko que o referen=
cial candnico & chamado um referencial positive, e, qualquer referencial de
orientagdo contréria A do referencial candnico & denominado um referencial
negative. Porém, preste muita atengio ao fato de que “esta é uma convengio
que fazemos, ¢ iremos manter, daqui em diante”.
Observardo
Os vetores G7 = (1,0,0), @ = (0,1,0) © &| = (0,0,1) do referencial
caninico C, formam uma hase ortenormal do espago, denominada a base
candnica do espaco, associada ao sistema de coordenadas OXY Z fixado.
O produto vetorial
Como dissemos anteriormente, fixamos um sistema ortogonal de co-
ordenadas cartesianas OXYZ wo espayo, e, em relagio a ele, considera
‘mos 0 referencial ortonormal (positive) candnico C = {O;%',@',@'}, onde
& =(1,0,0), & =(0,1,0)e & = (0.0.1).
Definicao 8.19 (Produto vetorial)
Sejam 7 e D” vetores no espago. O produto vetorial de w e 7”, designado
W x 7, é definido da seguinte maneira:
a. Se algum dos vetores 7” ou 7” é nulo ou os vetores 7 e 7” sdo colineares
{isto 6, 08 vetores sio LD), definimes a’ x @” =T°.
b. Se os vetores 7 ¢ T* so LI, definimas 7 x T* como sendo o tinico vetor
do espace que satisfax: aa soguintes condighes:
2 [fe xP = el [PM seul", 7).
2. @ x F 6 simnltaneamente perpendicular a 7 ea 7
3. O referencial (Py;@, 7,7 x F} & um referencial positivo,
qualquer que seja o ponto Pp.
Observacdo
'# Se os vetores 7 7 so LI, a condicéo b1. na Definicio 8.19 estabelece
© médulo de 7 x 7, a condigio b.2. determina a direcio de i x 7 e,
a condig&o b.3. especifica 0 sentido de u” x 0’. Como existe apenas um
vetor com médulo, diresao e sentido dados, 0 produto vetorial 7 x T° fica
detcrminado completa ¢ unicamente pelos vetores 7 ¢ 7.
‘+ Aléin disso, na parte b.3., estamos dizendo, de forma implicita, que quando
T eT sio LL entio. T xT 40.
De fato, se os vetores i e 7 siio LI, entiio eles
slo nio-nulos ¢ o angulo (7,7") é diferente de ya
zero € de 180°. Portanto, [Tl] #0. 7] #0
e son(T, 7) # 0.
* Sejam 7 = OA eT =OB vetores Lle 7
seja C0 ponto do planoquecontém 0. Ae B,
tal que OACB 6 um paralelogramo. Entio, XW
A
\|w x FI] = Area(OACB) . a
| Figura 8.105. fw x TI] =
pois tal paralelogramo tem altura Brea(OACB).
[OB| |sen(4AOB)| = FI] sen, 7)]
© base de medida |OA| = ||7'l] (Figura 8.108).
Na pritica, © produto vetorisl 6 caleulado usando coordenadas em
relagdo a um sistema ortogonal de coordenadas cartesianas, mas antes de
apresentar a forma do produto vetorial em coordenadas, analisames suas
propriedades usando apenas a Definicio 8.19.
Proposi¢éo 8.11 (Propriedades do produto vetorial)
Sejam 7”, 7° ¢ iw” vetores do espago e seja AE R. Entio,
aTxP=0 i eV sto LD.
b. xT =—W xT (propriedade anti-comutativa).
«. (MP) x 7 =A xT) = x (AP).
avx(@tw)=7
Definigo 9.20 (Produto misto de trés vetores no espaco)
0 produto misto dos vetores 7, T° 1 no espaco é 0 miimero real:
wx) 2)
Proposigao 9.12 (Propriedades do produto misto)
Sejam W, 7, Up € W" vetores no espago € A ER. Entdo:
Rew
2. [W, 7, @"] =0se, e somente se, 7, D” e W so coplanares (LD).
6 [Tw] >0
positivo,
Conseqiient
¢ somente se, (0:77, @} 6 um refereneial
mente, [77,7] < 0 se, e somente se, {0;
‘um referencial negativo.
(0.8) -@ aT] =e .e a] -- 0,7]
0.0] = TT]
[Pav .w] =F re] =r]
[w.0,w] + [woo]
Proposiciio 9.13 (Propriedade distributiva do produto vetorial)
Sejam i’, 7” ¢ i” vetores no espaco, entio,
Tx(P+P)aTxTseT xT
Proposicao 9.14
Seja (0:27, 2", &"} um referencial ortonomnal positive no espago. Entio
valem as occa identidades:
Axe =0, a xay=0
KGB, AxXG-a,
GK =-2, &xa =e,
Proposicao 10.15
Sejam T= (uy, ta,u3), 7 = (vi,02, 09) © T= (ws, a, ts) tes vetores
no espago. Designamos por det(7”, 7”, 7") o determinante 33, cujas linhas
siio as coordenadas respectivas dos vetores 7, 7” @ iz. Entio,
|
daw
wre] (10.11)
Ses
Proposicao 10.16 (Propriedades dos determinantes)
Sejam
(us, ta, Us), 7 = (v1,02,03), D6" = (01,2253) © = (wr, we, ws)
vetores no espago (darlos em termos de um sistema ortogonal positivo de co-
ordenadas cartesianas OXY Z) e um escalar \ € R.. Entao, valem as seguintes
propriedades.
A. det(7”, 7°, 7”) = 0 se, e somente se, os vetores 7”, 7” e i” sao LD.
B. det(7",7",T") > 0 {0;T, 7,7} 6 um referencial positivo.
det (7, 7,0") <0 <=> (0:7, 7,7} 6 um referencial negativo.
C. Permutar duas linhas adjacentes muda o sinal do determinante:
det(0" 7,0") = det(T,w, 7) = det(T, 7, 7) = — det (7.7.7).
det(T", TT) = det (T, 7, T) =det(7, 7,7).
D. Multiplicar todos os elementos de uma fila do determinante por uma
constante \ equivale a multiplicar o determinante por
det(A@, 7, D) = det(T, ATT) = det(T, TAD’) = d det(7. 7,7).
E. Valem as seguintes propriedades:
det (7 +07 TW) =det(7 7.7) + det(y’. 7.7).
det(W’, 7” + tp, ') =det(W,T’,D) + det(T, iH’, T).
det(w”, 0”, i” + Ip’) =det(i7, TW") + det(T, 7", iH).
Definicio 11.21
A distancia de um ponto P, a um plano Tl é a menor das distincias de Py
aos pontos de II ¢ se designa d(P), 1) (Figura 11.11).
Definigo 11.22
Sejam Il, € Thy dois planos. A distdncia entre Tl, € Tp, que denotamos
d(T, Th), €a menor das distdncias d(P;, P2), com Py € Th € P; € Th.
Definigo 11.23
Dados uma reta €¢ um plano II, a
disténcia entre ( ¢ Tl, que denotamos
d(C,11), 6 a menor das distaneias entre
pontos de £ ¢ os pontos do plano TI.
Dados uma reta £¢ um ponto Py, a distin-
cia de Py a £, que designamos por d(Py.0),
6 a menor das distncias de Py aos pontos de €.
Resumo
As retas men sfio
ralelas: se existe 4 € R, tal que 0” = AT” e (12.17) nao tem solugio.
se existe NR, tal que 7 = AT e (12.17) tem solugao.
se nao existe 1 €R, tal que 7” = AT’ e (12.17) tem solucio|
: se nao existe AE R, tal que 7 = AT e (12.17) nao tem solugao]
incidents
ncorrent
Distancia entre retas
DefinigSo 12.25
A distincia de wna reta m a outra n, denotada d(m,n), 6 a menor das
distncias entre pontos de m e pontos de n.
ProposicSo 12.17
Dadas duas retas reversas, ri € r2, existem planos Il, e Tz, tais quer: C Th,
rz C Tz eT, A Tz = B. On seja, retas reversas esto contidas em planos
paralelos.
Proposigio 12.18
Duas retas reversas tm uma reta perpendicular comum.
Proposigao 14119 (Regra de Cramer)
O sistema (III) tem uma sinica solugio se, ¢ somente se, A #0. Além disso,
se A #0, entio a solugio do sistema & (19.4%, 9). com
t=. yy = Shey ==.
Angulo entre retas
DefinigSo 13.26
O ngulo entre as retus 7, € rz no espago, que denotamos (r1,r2), é 0 menor
dos angulos formado entre diregies de ry e rz.
Concluséo
Sejam r; ¢ 72 retas com diregdes 7” e 7’ respectivamente.
Angulo (r;,r2), entre r; ¢ rp, 6 0 Angulo que satisfaz
cos(ri,r2) = | cos(ii", 2”)|
Angulo entre planos
DefinigSo 13.27
© Angulo entre os planos a €
a2, denotado (1,02), ¢ definido
da seguinte maneira:
# Se a1 € a» so paralelos,
© Angulo entre eles € igual a zero
(graus ou radianos). Figura 13.25: Angulo entre dois planes.
# Se a1 e az sao transversos, consideramos a reta m= a1 Na. Como
mostramos na Figura 13.25, tomamos um ponto A € me as retas:
7 contida em a , perpendicular am e passando por A;
r» contida em a2, perpendicular am ¢ passando por A.
Entao, definimos 0 Angulo entre a1 € a2 como sendo o angulo entre as
retas ry © 2, ou seja,
(ax,a2) = (ri.72)
Conclusio
Dessa forma, mostramos que o Angulo (a1, a2), entre os planos a1 € a2,
com respectivos vetores normais ij’ e 7p’, é 0 menor Angulo, tal que
c0s(a4,42) = leos(in’ 72”)
Definigao 13.28
A projecao ortogonal de uma reia r sobre um plano Il é 0 conjunto formado
elas projecdes ortogonais de todos os pontos de r sobre o plano II.
Defini¢io 13.29
Sejam r uma reta e I um plano, tais que MI # 2. O dngulo de incidéncia
der em IL 6 definido da seguinte maneita:
‘* Se r 6 perpendicular a I, entao o Angulo de incidéncia de r em II 6
90 graus (x/2 radianos);
‘* Se r est contida em II, o angulo de incidéncia de r em II é zero
(graus ou radianos);
‘* Se re II tém apenas um ponto em comum e néo sio perpendiculares
(isto 6, r é transversa a II), o Angulo de incidéncia de r em TI é o Angulo
entre re sua projecio ortogonal r! sobre Il.
Observagao
Note que o angulo de incidéncia da reta r no plano II nao esté definido
quando r MIL = @, isto é, quando r é paralela a II.
Concluso
Com isso, vemos que, para obter a projegao ortogonal de uma reta r
sobre um plano II, basta tomarmos dois pontos distintos A, B € re determi-
narmos suas respectivas projegies ortogonais A’ e B’ sobre Il. Se A’ = B’,
entdo a projegio de toda a reta r é umn tinico ponto (no caso, igual a A’).
Se A’ ¢ B’, enti a projecio de r sobre TI 6a reta r’ CTI determinada pelas
projegies A’ e BY
Conclusio
0 Angulo de incidéncia de r em II é 0 menor Angulo cujo cosseno é
1
rr)
em que D” é direcio de r, e 7 é direc&io normal a II.
Definicdo 15.30
Um subconjunto $ de pontos do espago 6 uma superficie regrada se as
seguintes condigées sio satisfeitas:
i. Existe uma curva D contida em S, tal que para calla ponto P de D
existe uma reta Lp contida em S, passando por P;
ii, A unido de todas as retas Lp é a superficie S.
A curva D é chamada uma diretriz da superficie S c cada reta Lp é denomi-
nada uma geratriz de S (veja a Figura 15.39).
Dentro do conjunto de superficies regradas, encontramos dois tipos es-
peciais: as superficies cilindricas ¢ as superficies cénicas.
Superficies regradas cilindricas: so superficies regradas em que as retas Lp
sto paralelas.
Definig3o 15.31.
Consideremos uma curva C e uma reta r, ambas contidas mm plano TI.
Tmaginemos 0 movimento de rotagao desse plano em torno da reta r, como
0 movimento da Terra em tomo de seu eixo. Em nosso caso, a reta r
desempenha © papel do eixo. Pensemos, agora, no conjunto de pontos do
espago descrito pela curva C ao dar uma volta completa em toro der. Esses
pontos determinam uma superficie $ denominada superficie de revolugéo.
A curva C é denominada uma gerairiz de Se a reta r 6 chamada eiro de
revolucao (ou eizo de rotagéo) de S.
Caracteristica importante
Como movimento de rotagéo em tomo
da reta r, cada ponto P de € determina
um circulo. Esses circulos sfio denomina-
dos paralelos da superficie. Cada um dos
planos obtidos girando o plano II em torno
da reta r contém uma cépia da curva C. Es-
‘sas copias de C sao chamadas meridianos da
superficie S (Figura 15.42).
Figura 15.42: Superficie de re-
volugio S.
Resumindo
Para obter a equacio cartesiana da superficie de revolucio S, gerada
pela rotacio de uma curva geratriz C contida em um dos planos coordena-
Idos, procedemos de maneira anéloge A explicada anteriormente, observando,
cuidadosamente, qual é a coordet
ada que permanece fixa ao girar os pontos
da curva geratriz. Calculando como fizemos antes, obtemos a equag&o carte-
siana da superficie de revolugiio S, dependendo da posigfo da curva C, como
mostramos na seguinte tabela.
Gomaute of sen=o |, {es =0 o{ ie
2=0 e=0
no plano XY no plano XZ no plano ¥Z
eixo—OX | f(2.t/FF=) =0 | f(wtVFF=)=0 x
eixo-OY | f(tvFF27,y) =0 x Sy AVE)
eixo—OZ x SAVER 2) =0| 4VF Fez) =0
Definicéo 16.32
Uma superficie quddrica é 0 subconjunto de pontos do espaco que satisfaz
uma equagio do tipo
Ar? + By? + C2 + Dry + Ex: + Fyz+ Gr+ Hy +Iz+J=0,
onde A, B,C, D, E, F,G, H, Isio escalares reais constantese A, B,C, D, E, F
nao sao simultaneamente nulos, isto 6, pelo menos um desses valores é dife-
rente de zero.
Elipsdides
Definigao 16.33
Dados trés niimeros reais positivos a, b e c, denominamos elipsdide de centro
(0,0,0) 0 conjunto €, cujos pontos P = (.r,y, z) satisfazem a equacio
2
ate
Definicio 16.34
Dizemos que um plano II 6 tangente a um elipsdide € se ele eo elipsdide
‘tém um tinico ponto em comum. Isto é, ITM € consiste de apenas um ponto,
denominado ponto de tangéncia.
Proposicio 16.20
Os elipsdides cuja equagio 6 de uma das seguintes formas
Bede om Sede
Ss
Rds
2 2
eSeS-1,
siio superficies de revolugio.
Proposicao 16.21
Os elipsdides no so superficies regradas.
Proposicao 16.22 (Propriedade dos planos tangentes 3 esfera)
Se um plano II é tangente a uma esfera S de centro O e raio r em um ponto
P, entio a reta que passa por O com diregéo OP’ 6 perpendicular a II.
Cones quédricos
Nesta aula, vamos estudar outro tipo de superficies formadas por pontos
cujas coordenadas satisfazem uma certa equagio do segundo grau nas trés
varidveis espaciais. Comecamos com a seguinte definigio.
Definigio 17.35
Sejam a, b, c valores reais positivos. Denominamos cone quédrico a superficie
quédrica $ formada pelos pontos P = (x,y, z) cujas coordenadas satisfazem
a equagio do segundo grau
(1726)
Conven¢ao
Daqui em diante, omitiremos 0 termo guddrico, mas ele nao deve ser es-
quecido. Todas as superficies cénicas que iremos estudar sfo cones quédricos.
Observacao
2 x
ate
pois as segdes planas obtidas intersectando S por planos perpendiculares ao
eixo OZ sio elipses. Esse eixo é denominado eizo do cone. Quando as segies
planas perpendiculares ao eixo sdio circulos, dizemos que $ éum cone circular.
Os cones de equagio S = F silo denominados cones elipticos,
Definicio 18.36
Datos valores reais positivos a, b, c, denominamos hiperboldide de uma folha
a0 conjunto de pontos do plano que satisfaz uma equagio do tipo
(18.30)
Hiperboléide de duas folhas
Definicao 18.37
Dados valores reais positivos a, b,c,
denominamos hiperboldide de duas fol-
has a superficie quédrica formada pelo
conjunto de pontos P = (x,y,z) do
espago, cujas coordenadas satisfazem Figura 18.95: Hiperboléide de duas
‘uma equacdio do tipo folhas S (18.34) .
(18.34)
Definigio 19.38
Sejam a e b niimeros reais positives. Denominamos paraboléide eliptico &
superficie quédrica $ formada pelos pontos P = (x,y,2) cujas coordenadas
satisfazem uma equagio do tipo
Paraboléide hiperbélico
Definicgo 19.39
Sejam a e b utimeros reais positives. Denom-
S. formada pelos pontos P = (2, 2) doespaco,
cujas coordenadas satisfazem uma equaciio do
tipo (veja a Figura 19.111)
Figura 19,111: Paraboléide e
hiperbélico S.
Proposi¢ao 19.23 :
O paraboldide hiperbélico $: 2= 5 - e 6 uma superficie regrada.
inamos paraboléide hiperbdlico & superficie quédrica,
Definicio 20.40 x
Um cilindro quddricoé uma superficie
regrada S que satisfaz.as seguintes pro-
priedades:
i. Contém uma diretriz D que 6
uma cénica contida em um plano;
ii, Para cada P € D, a reta gera- Y
triz Lp, pasando pelo ponto P, é per-
pendicular ao plano que contém a di- s
retriz D (Figura 20.129). Portanto, as
geratrizes sfio retas paralelas.
Figura 20.129: Cilindro eliptico.
Um cilindro quédrico 6 denominado eliptico, parabélico ou hiperbélico,
se a sua geratriz. for uma elipse, uma parabola ou uma hipérbole.
Cilindros elipticos
Os cilindros elipticos so os cilindros quédricos em que a diretriz é uma.
elipse. Para obter a equacao do cilindro elfptico, consideremos 0 caso em que.
a diretriz é a elipse
Poy
vii ate!
2=0.
Cilindros parabélicos
Os cilindros parabélicos sao os cilindros qudricos em que a diretriz é
uma parabola. | .
Cilindros hiperbélicos
Os cilindros hiperbélicos siio os cilindros quédricos cuja diretriz D é uma hipérbole.
iro quidrico de revolug3o
Os cilindros quédricos de revolugao
so cilindros elipticos em que as diretrizes
so cireulos.
Portanto, a equagio de um cilindro
quédrico de revolugao 5 é da forma
Sivty =a
Esse cilindro 6 obtido pela rotagao da
seta y=0 &™ tomo do eixo OZ.
Obseracio Figura 20.138: Cilindso quidsico
de revolugao S.
Damos énfase & expressio cilindro quidrico, porque ha ontros tipos de
cilindros que n&o so quédricos, isto 6, as coordenadas de seus pontos no
satisfazem uma equagio do segundo grau. Em todo o seguinte, omitiremos 0
‘termo quédrico para simplificar a linguagem, mas ele nio deve ser esquecido.
Identificagio de quédricas
Nas aulas anteriores, apresentamos as superficies quédricas, deduzimos
‘as sas equagées e demos-Ihes um nome. Nesta aula, vamos apresentar alguns
critérios que auxiliam na identificagéo de uma quédrica. Ao final do nosso
estudo, vocé poderd identificar uma quédrica a partir de uma equagio do
segundo grau e vice-versa.
Quédrica | Tipo e caracterfsticas da equagio
Enpsope | Ar? + By +Cz=D, com A, B,CoD
todos com mesmo sinal.
HIPERBOLOWE | Ax? + By? +C2* =D, com D>0;e A, BeC
DE_UMA FOLHA. | nio-nulos, sendo apenas um deles negativo.
HiperBoLowe | Ar? + By? +C2? =D, com D>0;e A, BeC
DE DUAS FOLHAS | nfio-mulos, sendo dois deles negativos.
PARABOLOWE | Cz= Ar? + By?, com A, B de mesmo sinal
guiprico___| eC #0 com qualquer sinal.
Paraporéme | Cz = Ax? + By?, com A, B de sinais opostos
mperndrico_| e C0 com qualquer sinal
‘Cones Ar? + By =C2*, com A, Be C nio-nulos e
de mesmo sinal.
CiinpRos | Na equagio aparecem apenas duas varidveis
em termos distintos com grau 1 ou 2.
You might also like
- IEP Apres 13 10 11 06 55 43Document116 pagesIEP Apres 13 10 11 06 55 43Ary MarcellyNo ratings yet
- Caderno FisicaDocument276 pagesCaderno FisicaFelipe Lawnsen100% (1)
- Escola InclusivaDocument13 pagesEscola InclusivaCimara BandeiraNo ratings yet
- 28CBM 10Document91 pages28CBM 10Jimmy Bomfim de JesusNo ratings yet
- AFO Apostila Alexandre Americo PDFDocument155 pagesAFO Apostila Alexandre Americo PDFJimmy Bomfim de JesusNo ratings yet
- Dissertacao Leandro Rubino PDFDocument112 pagesDissertacao Leandro Rubino PDFJimmy Bomfim de JesusNo ratings yet
- 0 13 14 Apoiocomplexa Integracao TeoremasDocument6 pages0 13 14 Apoiocomplexa Integracao TeoremasJimmy Bomfim de JesusNo ratings yet
- Femc 2015 1 PDFDocument270 pagesFemc 2015 1 PDFJimmy Bomfim de JesusNo ratings yet
- Exercícios Da Apostila de MecânicaDocument9 pagesExercícios Da Apostila de MecânicaJimmy Bomfim de JesusNo ratings yet
- Manual de Redacao Do Enem 2017Document50 pagesManual de Redacao Do Enem 2017Ábia CostaNo ratings yet
- Cálculo 3A UFFDocument366 pagesCálculo 3A UFFJimmy Bomfim de JesusNo ratings yet
- 48189Document114 pages48189Jimmy Bomfim de JesusNo ratings yet
- Exercícios Da Apostila de Mecânica PDFDocument150 pagesExercícios Da Apostila de Mecânica PDFJimmy Bomfim de JesusNo ratings yet
- Resumão Exatas 13 - Estatística PDFDocument6 pagesResumão Exatas 13 - Estatística PDFLincoln Lobo100% (1)
- Português Instrumental: Módulos eDocument285 pagesPortuguês Instrumental: Módulos ecientista27No ratings yet
- Geometria Analitica 2 Teoremas & DefiniçõesDocument22 pagesGeometria Analitica 2 Teoremas & DefiniçõesJimmy Bomfim de JesusNo ratings yet
- Geometria Analitica 2 Teoremas & DefiniçõesDocument22 pagesGeometria Analitica 2 Teoremas & DefiniçõesJimmy Bomfim de JesusNo ratings yet
- A Revolução Dos Trabalhadores - Anton PannekoekDocument96 pagesA Revolução Dos Trabalhadores - Anton PannekoekdomliterisNo ratings yet
- Apostila - Cálculo IIIDocument147 pagesApostila - Cálculo IIIFlávio Roberto RibeiroNo ratings yet
- P - Tudo 1 MarcadoDocument214 pagesP - Tudo 1 MarcadoJimmy Bomfim de JesusNo ratings yet
- Português InstrumentalDocument223 pagesPortuguês InstrumentalNanoMadoNo ratings yet
- 48189Document114 pages48189Jimmy Bomfim de JesusNo ratings yet
- 48503Document266 pages48503Leonardo GiglioNo ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 47950Document244 pages47950Jimmy Bomfim de JesusNo ratings yet
- 46805Document183 pages46805Jimmy Bomfim de JesusNo ratings yet
- 8 19Document1 page8 19Jimmy Bomfim de JesusNo ratings yet
- Relatório Experiência 2Document19 pagesRelatório Experiência 2Jimmy Bomfim de JesusNo ratings yet
- Relatório 2Document21 pagesRelatório 2Jimmy Bomfim de JesusNo ratings yet
- Aluno-Aula 5 - Técnicas de Análise de RiscoDocument58 pagesAluno-Aula 5 - Técnicas de Análise de RiscoAires Humberto100% (1)
- TCC Avaliacao SiengeDocument86 pagesTCC Avaliacao SiengeIdo ManoelNo ratings yet
- Multiplos, Divisores, 5anoDocument4 pagesMultiplos, Divisores, 5anoSílvia GodinhoNo ratings yet
- Funcoes Sintaticas 2 CorrecaoDocument3 pagesFuncoes Sintaticas 2 CorrecaoCatarina Dias DNo ratings yet
- 2 - Campo Magnético No Interior de SolenoideDocument2 pages2 - Campo Magnético No Interior de SolenoideLuciano Silva do NascimentoNo ratings yet
- Apostila TecladoDocument43 pagesApostila Tecladoimrmartins1No ratings yet
- Risco Sistemático e Risco Não SistemáticoDocument3 pagesRisco Sistemático e Risco Não Sistemáticowell_wyldeNo ratings yet
- Unidade II - LimitesDocument30 pagesUnidade II - LimitesMarcos Antonio Batista GonçalvesNo ratings yet
- Portas LogicasDocument15 pagesPortas LogicasAnderson VertuanNo ratings yet
- Compiladores - ResumoDocument2 pagesCompiladores - Resumowilliamcsj100% (1)
- Conversores de CódigosDocument5 pagesConversores de CódigosVamos Deixar Isso De LadoNo ratings yet
- Teclado GospelDocument59 pagesTeclado GospelRodrigues Júnior Rodrigues100% (4)
- fq9 BQ 00003Document6 pagesfq9 BQ 00003Joana Costa100% (1)
- Laudo Insalubridade PericulosidadeDocument16 pagesLaudo Insalubridade PericulosidadeNayana André80% (5)
- Projeto2 2017Document15 pagesProjeto2 2017Danilo HenriqueNo ratings yet
- Questões e Desafios FQ9Document49 pagesQuestões e Desafios FQ9Susana Chaves67% (6)
- Cálculo I - Problemas de OtimizaçãoDocument47 pagesCálculo I - Problemas de OtimizaçãoLuis Henrique BaroniNo ratings yet
- Lista12 THDocument3 pagesLista12 THoliver jamesNo ratings yet
- V2 Apostila Instrutor Fundamentos de IADocument27 pagesV2 Apostila Instrutor Fundamentos de IARicardoNo ratings yet
- Resolucao ProvadeMatematica Vestibular Unicamp 2013 Fase2Document9 pagesResolucao ProvadeMatematica Vestibular Unicamp 2013 Fase2Rogério CardosoNo ratings yet
- AmvDocument6 pagesAmvf_778206304100% (1)
- Abstração PDFDocument4 pagesAbstração PDFGeraldo HillesheimNo ratings yet
- 001 - EProvasOficiais - GeometriaanaliticaDocument13 pages001 - EProvasOficiais - Geometriaanaliticapimentinha77No ratings yet
- Arcos e Angulos Lista PDFDocument4 pagesArcos e Angulos Lista PDFJô CorrêaNo ratings yet
- Sys - Parâmetros e Funções Específicos Do Sistema - Documentação em Python 3.7.5rc1Document25 pagesSys - Parâmetros e Funções Específicos Do Sistema - Documentação em Python 3.7.5rc1DK SecurityNo ratings yet
- Análise Econômica NotasAULA 2023Document63 pagesAnálise Econômica NotasAULA 2023Luisa DecimoniNo ratings yet
- Dimensionamento de Sistema de Alimentação - Canais - Massalotes - 25.06.18Document8 pagesDimensionamento de Sistema de Alimentação - Canais - Massalotes - 25.06.18Carolai FabrisNo ratings yet
- Teoria Da Localização Industrial PDFDocument18 pagesTeoria Da Localização Industrial PDFArtur BelingNo ratings yet
- Geometria Descritiva PDFDocument15 pagesGeometria Descritiva PDFMarceloRosaNo ratings yet
- 1º Lista de Exercicío - (2ºetapa Teste) - Noções de AlgebraDocument4 pages1º Lista de Exercicío - (2ºetapa Teste) - Noções de AlgebraErineu FilhoNo ratings yet