You might also like
- Plan Et Coupe Passerelle Metallique ICARDADocument1 pagePlan Et Coupe Passerelle Metallique ICARDAosmanovic2020No ratings yet
- Etude Et Optimisation Des Paramètres D'une Liaison Optique À SONATRACH BéjaïaDocument90 pagesEtude Et Optimisation Des Paramètres D'une Liaison Optique À SONATRACH BéjaïasowNo ratings yet
- Types Des Vannes Et Des BridesDocument9 pagesTypes Des Vannes Et Des BridesMoez JaouediNo ratings yet
- Note de Synthèse Pompes Incendie Et Eau PotableDocument3 pagesNote de Synthèse Pompes Incendie Et Eau PotableYassine BouchNo ratings yet
- Note de Calcul Poste Deluge Groupe Elect1Document16 pagesNote de Calcul Poste Deluge Groupe Elect1MohammedNo ratings yet
- Memento Autocad PDFDocument1 pageMemento Autocad PDFayadiNo ratings yet
- Exploration Du Logiciel de Traitement de Données Lidar Leica Cyclone HDSDocument18 pagesExploration Du Logiciel de Traitement de Données Lidar Leica Cyclone HDSVannia Zapata RiveraNo ratings yet
- 2209 Olms Cint Exe Doc 001Document21 pages2209 Olms Cint Exe Doc 001AmineNo ratings yet
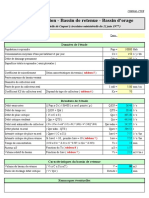
- Calcul de Bassin Versant UtileDocument6 pagesCalcul de Bassin Versant UtileAnonymous DjA2T2I2No ratings yet
- Bassin de RetenuDocument6 pagesBassin de RetenuMAHMOUDI ABDELKRIMNo ratings yet
- Dimensionnement Collecteur Maj2014Document12 pagesDimensionnement Collecteur Maj2014Noureddine AitelhajNo ratings yet
- Instruction EpanetDocument7 pagesInstruction EpanetIheb DerwichNo ratings yet
- Cephee GTP A PDFDocument100 pagesCephee GTP A PDFakramhomri100% (1)
- Cours 2 SIG MasterDocument11 pagesCours 2 SIG MasterkhenguiNo ratings yet
- PAQ - ZAC Des DOCKS - Secteur 1 PDFDocument18 pagesPAQ - ZAC Des DOCKS - Secteur 1 PDFChristel pradelNo ratings yet
- JO 63 Condition D'octroi de L'autorisation de Torchage Par ALNAFTDocument23 pagesJO 63 Condition D'octroi de L'autorisation de Torchage Par ALNAFTBOUNATIRONo ratings yet
- Simulateur de Procidé Chapitre1Document29 pagesSimulateur de Procidé Chapitre1HadjNo ratings yet
- Note de Presentation Et CalculDocument8 pagesNote de Presentation Et CalculAyoub VbNo ratings yet
- LE By-PassDocument4 pagesLE By-Passcirage31100% (1)
- Zrapport FinDocument28 pagesZrapport FinHamzaChmitiNo ratings yet
- CCTP Lit de SechageDocument37 pagesCCTP Lit de SechageDiden DzNo ratings yet
- SaniwinDocument58 pagesSaniwinGhizlaneMouhallaNo ratings yet
- WEAP - Tutorial - French PDFDocument203 pagesWEAP - Tutorial - French PDFNacera BenslimaneNo ratings yet
- AssDocument2 pagesAssAzzedine GarahNo ratings yet
- 20141110.NDC PDC AERAULIQUEDocument7 pages20141110.NDC PDC AERAULIQUEabdessamad CHADDOUNo ratings yet
- Questions Dimensionnement Des Tuyauteries Circuits FermesDocument11 pagesQuestions Dimensionnement Des Tuyauteries Circuits FermesHazem ChakrounNo ratings yet
- CovadisDocument2 pagesCovadisZaki BouananeNo ratings yet
- 6 HG0203 Corrige PDFDocument4 pages6 HG0203 Corrige PDFbougheraraNo ratings yet
- Guide Aft ImpulseDocument26 pagesGuide Aft ImpulsefedaouiNo ratings yet
- Note de Calcule D'a.e.p. OuarglaDocument5 pagesNote de Calcule D'a.e.p. Ouarglabelbachir nabilNo ratings yet
- PorteauFree InstallationDocument8 pagesPorteauFree InstallationRafik ChNo ratings yet
- Dimensionnement FRDocument21 pagesDimensionnement FRThierryNo ratings yet
- Exercice N° HU 0301 - Corrigé - LTHEDocument5 pagesExercice N° HU 0301 - Corrigé - LTHEothmane ouajarNo ratings yet
- Dimensionnement SPDocument3 pagesDimensionnement SPNasr HoussemNo ratings yet
- Pfe GCDocument103 pagesPfe GCNidhal PacinoNo ratings yet
- Cours TuyauterieDocument32 pagesCours TuyauterieTarekNacerNo ratings yet
- Chapitre 4 Dynamique Fluide IdéalDocument37 pagesChapitre 4 Dynamique Fluide IdéalNowe AhmadeNo ratings yet
- PARTIE 2-Exigence Du Maitre d'Ouvrage-H PDFDocument60 pagesPARTIE 2-Exigence Du Maitre d'Ouvrage-H PDFYoussef JakeNo ratings yet
- R0316-RPT-ME-00-001 Rev ADocument218 pagesR0316-RPT-ME-00-001 Rev ABilel Mahjoub100% (1)
- Le Code de Calcul HECDocument4 pagesLe Code de Calcul HECAsma ElbrikeNo ratings yet
- Hydraulique À Surface LibreDocument44 pagesHydraulique À Surface LibreHoussam RafiiNo ratings yet
- CADWorx 1Document6 pagesCADWorx 1Hanen LajnefNo ratings yet
- Branchement Par Culotte Par Tulipe Ou Par PiquageDocument2 pagesBranchement Par Culotte Par Tulipe Ou Par PiquageDounia ElNo ratings yet
- Utilisation Du Logiciel WEAP Pour La Modélisation de La Gestion Des Eaux de Surface Du Bassin Versant de MedjerdaDocument6 pagesUtilisation Du Logiciel WEAP Pour La Modélisation de La Gestion Des Eaux de Surface Du Bassin Versant de MedjerdajusteNo ratings yet
- Methodologie PF100Document3 pagesMethodologie PF100Hugues LwembeNo ratings yet
- HVAC ShelterDocument26 pagesHVAC ShelteradissfashNo ratings yet
- 4.01 Concept de Mise A Terre ArnouxDocument10 pages4.01 Concept de Mise A Terre ArnouxSaid MashateNo ratings yet
- VRD+CH6 La Voirie Z.S 2020 Cours N°1-ConvertiDocument3 pagesVRD+CH6 La Voirie Z.S 2020 Cours N°1-ConvertiMohammed AmineNo ratings yet
- Actualisation Et RévisionsDocument2 pagesActualisation Et RévisionsGhalem BoumedieneNo ratings yet
- Cahier Des Prescriptions Techniques Communes Chauffage Par Plafond Rayonnant Platre PRPDocument18 pagesCahier Des Prescriptions Techniques Communes Chauffage Par Plafond Rayonnant Platre PRPowirwojNo ratings yet
- Méthode Calcul Rationnelle & CaquotDocument9 pagesMéthode Calcul Rationnelle & Caquotzhor El hallaouiNo ratings yet
- Cahier Des Charges - AssainissementDocument8 pagesCahier Des Charges - Assainissementkar100% (1)
- Délimitation Des Bassins VersantsDocument1 pageDélimitation Des Bassins VersantsSaid JabirNo ratings yet
- 3 Formation Covadis Projet Par Profil Type - Watermark PDFDocument133 pages3 Formation Covadis Projet Par Profil Type - Watermark PDFHarice MoussangoNo ratings yet
- Formation LydecDocument37 pagesFormation Lydecmajdi saraNo ratings yet
- 6 0031 16 PDFDocument99 pages6 0031 16 PDFMa RiemNo ratings yet
- Dimensionnement AntibelierDocument1 pageDimensionnement AntibelierMed Ben-jahouNo ratings yet
- Coordonnees PolairesDocument17 pagesCoordonnees Polairesabou diagneNo ratings yet
- Coordonnées Polaires - WikipédiaDocument43 pagesCoordonnées Polaires - WikipédiaKem VicNo ratings yet
- Chapitre 0 Introduction À La Cinématique: - Vitesse, Accélération - Coordonnées Polaires - Exercices CorrigésDocument8 pagesChapitre 0 Introduction À La Cinématique: - Vitesse, Accélération - Coordonnées Polaires - Exercices CorrigésKhaled AlouiniNo ratings yet
- 1710 PDF Du 30Document26 pages1710 PDF Du 30PDF JournalNo ratings yet
- Histoire Et Géographie Sacrées Dans Le CoranDocument37 pagesHistoire Et Géographie Sacrées Dans Le CoranCatharsis HaddoukNo ratings yet
- Construire en TerreDocument274 pagesConstruire en Terreridha1964100% (4)
- Bourdieu Emprise JournalismeDocument4 pagesBourdieu Emprise JournalismebobyNo ratings yet
- Algorithmes de Traitement Suggeres HTADocument3 pagesAlgorithmes de Traitement Suggeres HTAZiedBenSassiNo ratings yet
- Compl Biologie Etudiant S-1Document43 pagesCompl Biologie Etudiant S-1aloys NdzieNo ratings yet
- 27 Eme - Tob - 02-10-2021Document2 pages27 Eme - Tob - 02-10-2021Joyce DouanlaNo ratings yet
- 1715944Document1 page1715944ADRIANNE BETTANo ratings yet
- Pinpankôd Désigne Celle Des Jeunes Garçons Et Filles Dont L'âge VarieDocument20 pagesPinpankôd Désigne Celle Des Jeunes Garçons Et Filles Dont L'âge VarieNajimou Alade TidjaniNo ratings yet
- Manuel MilitaireDocument204 pagesManuel MilitaireFRED100% (1)
- Série TD 5 Phys2 2019 2020+corrigéDocument5 pagesSérie TD 5 Phys2 2019 2020+corrigéamiranomi5No ratings yet
- Droit Des Affaires 2019 - 2020Document104 pagesDroit Des Affaires 2019 - 2020YassminaNo ratings yet
- ExamSys1 LMD 2010 2011 EpreuveCorDocument2 pagesExamSys1 LMD 2010 2011 EpreuveCorSira NdiayeNo ratings yet
- Generateur High Tech Mig Mag Digiwave III Saf-Fro FRDocument16 pagesGenerateur High Tech Mig Mag Digiwave III Saf-Fro FROmar MaalejNo ratings yet
- Ligne Directrice 2021 - DyslipidémieDocument1 pageLigne Directrice 2021 - Dyslipidémiesara harvey vachonNo ratings yet
- Flyer Passerelle VF (18752)Document2 pagesFlyer Passerelle VF (18752)grosjeanblandineNo ratings yet
- Module 3 La Mise en Oeuvre La Résine Epoxy Clé en MainDocument19 pagesModule 3 La Mise en Oeuvre La Résine Epoxy Clé en Maintommy100% (1)
- Formula D PDFDocument16 pagesFormula D PDFNour-Eddine BenkerroumNo ratings yet
- A3 2 PDFDocument34 pagesA3 2 PDFLéopold SENENo ratings yet
- Endo Revision PDFDocument13 pagesEndo Revision PDFMedecine Dentaire100% (2)
- Pyramide MaslowDocument3 pagesPyramide Maslowvibus2014No ratings yet
- Moez El Kouni: ExperienceDocument1 pageMoez El Kouni: ExperienceMoezNo ratings yet
- PHARMACO Respi. Médicaments de La TouxDocument40 pagesPHARMACO Respi. Médicaments de La TouxyvesNo ratings yet
- Atelier1 PowerQueryDocument2 pagesAtelier1 PowerQuerylouay bencheikhNo ratings yet
- FoQual Rapport Incidents FRDocument40 pagesFoQual Rapport Incidents FRMarco SanNo ratings yet
- SAAD 2019 ArchivageDocument224 pagesSAAD 2019 ArchivageCarlos Redondo BenitezNo ratings yet
- Babas Savarins-1Document1 pageBabas Savarins-1Benjamin GevoldeNo ratings yet
- American Gods - Neil GaimanDocument254 pagesAmerican Gods - Neil GaimanmrabdoNo ratings yet
- Brevet Sur Le Front Populaire Avec CorrectionDocument2 pagesBrevet Sur Le Front Populaire Avec Correctiondouzi nourNo ratings yet
- Format Label 113Document5 pagesFormat Label 113Marlisa IchaNo ratings yet