You might also like
- DMA Controller Code in VHDLDocument7 pagesDMA Controller Code in VHDLapi-3730590100% (2)
- MSDAP ReportDocument7 pagesMSDAP ReportAditya MittalNo ratings yet
- EDN Design Ideas 2004Document155 pagesEDN Design Ideas 2004chag1956100% (2)
- Eee 270 Advanced Topics in Logic Design More On FSMDS: References/CreditsDocument27 pagesEee 270 Advanced Topics in Logic Design More On FSMDS: References/CreditsPraveen MeduriNo ratings yet
- EEE 70 Advanced Topics in Logic Design: Read Before ClassDocument30 pagesEEE 70 Advanced Topics in Logic Design: Read Before ClassPraveen MeduriNo ratings yet
- FPGA Keyboard Interface - Embedded ThoughtsDocument29 pagesFPGA Keyboard Interface - Embedded ThoughtsAshok kumarNo ratings yet
- 1 SerialaddDocument9 pages1 SerialaddayeshaNo ratings yet
- FSM, Asm, FSMD, Asmd: EECE-4740/5740 Advanced VHDL and FPGA DesignDocument34 pagesFSM, Asm, FSMD, Asmd: EECE-4740/5740 Advanced VHDL and FPGA DesignCuong PhamNo ratings yet
- Digital Logic Design: Register Transfer Specification & DesignDocument22 pagesDigital Logic Design: Register Transfer Specification & Designsunny louisNo ratings yet
- PRBSDocument4 pagesPRBSshabi09040% (1)
- Finite State Machine (FSM) : ExampleDocument22 pagesFinite State Machine (FSM) : ExampleDanish WilsonNo ratings yet
- EE 459/500 - HDL Based Digital Design With Programmable Logic FSM, Asm, FSMD, AsmdDocument15 pagesEE 459/500 - HDL Based Digital Design With Programmable Logic FSM, Asm, FSMD, AsmdMushtaq sheikhNo ratings yet
- Unsigned Divider RTL ModelDocument10 pagesUnsigned Divider RTL ModelgadhaNo ratings yet
- Current SensorDocument15 pagesCurrent SensorJohn Errol MergalNo ratings yet
- 8.0 Resolving Multi-Signal Drivers: 8.1 BusesDocument20 pages8.0 Resolving Multi-Signal Drivers: 8.1 BusesAvirup MullickNo ratings yet
- LED Buzzer: R6 470 LS1 R7 100Document10 pagesLED Buzzer: R6 470 LS1 R7 100pratheep01No ratings yet
- Digital Logic Design: Register Transfer Specification & DesignDocument21 pagesDigital Logic Design: Register Transfer Specification & DesignTrần Thảo NguyênNo ratings yet
- 1.0 The Design of Datapath Decoder: Ece 522/computer OrganizationDocument36 pages1.0 The Design of Datapath Decoder: Ece 522/computer OrganizationacapNo ratings yet
- Lab Report: Name: Abdul Rehman Khan STD No: 184311 Lab Assistant: MR Oluwatayomi Rereloluwa AdegboyeDocument20 pagesLab Report: Name: Abdul Rehman Khan STD No: 184311 Lab Assistant: MR Oluwatayomi Rereloluwa AdegboyeSikandar AliNo ratings yet
- CoaDocument1 pageCoaAbhishek BhallaNo ratings yet
- Verilog Modules For Common Digital FunctionsDocument30 pagesVerilog Modules For Common Digital Functionssudarshan poojaryNo ratings yet
- Digital Design Using VHDL: Using Xilinx'S Tool For Synthesis and Modelsim For Verification Part (Iv)Document17 pagesDigital Design Using VHDL: Using Xilinx'S Tool For Synthesis and Modelsim For Verification Part (Iv)Rakesh Kumar DNo ratings yet
- Udp VerilogDocument23 pagesUdp VerilogHarsimranNo ratings yet
- Verilog User Defined PrimitivesDocument8 pagesVerilog User Defined PrimitivesSurya PrakashNo ratings yet
- Tutorial: Modeling and Testing Finite State Machines (FSM)Document5 pagesTutorial: Modeling and Testing Finite State Machines (FSM)rajesh4172003No ratings yet
- Week 10 - Datapath Sequential LogicDocument27 pagesWeek 10 - Datapath Sequential Logic서종현No ratings yet
- Universidad Nacional Tecnologica de Lima SurDocument5 pagesUniversidad Nacional Tecnologica de Lima SurJoseph JesusNo ratings yet
- Universidad Nacional Tecnologica de Lima SurDocument5 pagesUniversidad Nacional Tecnologica de Lima SurJoseph JesusNo ratings yet
- Arm ProcessorDocument9 pagesArm ProcessorRahul AgarwalNo ratings yet
- Digital System DesignDocument41 pagesDigital System DesignMohit VermaNo ratings yet
- CD Lab - Anubhav PDFDocument47 pagesCD Lab - Anubhav PDFRNo ratings yet
- Bai 15 - ADC and DAC On Spartan 3E Starter BoardDocument6 pagesBai 15 - ADC and DAC On Spartan 3E Starter BoardNguyễn Hữu DuyNo ratings yet
- El5067 13 Lec03 FSM and HLSM in VHDLDocument28 pagesEl5067 13 Lec03 FSM and HLSM in VHDLhasbiiieNo ratings yet
- Write The VHDL Code That Describe: Bit CountDocument31 pagesWrite The VHDL Code That Describe: Bit CountMad Hatter MercuryNo ratings yet
- Prog New VHDLDocument7 pagesProg New VHDLRjeevNo ratings yet
- Week #6 - Verilog Behavioural Modeling (Part 4) FSMDocument21 pagesWeek #6 - Verilog Behavioural Modeling (Part 4) FSMKhayrinNajmiNo ratings yet
- 8 Bit Hex To Decimal ConversionDocument20 pages8 Bit Hex To Decimal ConversionManoj Kavedia100% (1)
- Finite State Machine (FSM) : ExampleDocument22 pagesFinite State Machine (FSM) : Examplehaseeb tNo ratings yet
- VHDL 4 RTL ModelsDocument33 pagesVHDL 4 RTL ModelsNguyễn Minh NghĩaNo ratings yet
- ARM Instruction SetDocument29 pagesARM Instruction SetNeeshank MahajanNo ratings yet
- Verilog Coding ExamplesDocument11 pagesVerilog Coding ExamplesbhargavNo ratings yet
- Verilog ProgramsDocument40 pagesVerilog ProgramssundaraiahNo ratings yet
- Create ASCII Files Using Utl - File PackageDocument2 pagesCreate ASCII Files Using Utl - File Packagevrbala100% (3)
- SSC07 2004 eDocument19 pagesSSC07 2004 eDragosFlorinLismanNo ratings yet
- Mipsx 21Document16 pagesMipsx 21hayoula3No ratings yet
- INFORME PRACTICA No 2Document30 pagesINFORME PRACTICA No 2MAURICIO REYES ROSERONo ratings yet
- PIC18F4520 Instruction SetDocument4 pagesPIC18F4520 Instruction SetCongtan94No ratings yet
- ZadatciDocument22 pagesZadatciTakticar100% (1)
- Digital VlsiDocument18 pagesDigital Vlsiwww.chandangowda1128No ratings yet
- EEE3096S Formula SheetDocument3 pagesEEE3096S Formula SheetLesley ShonhiwaNo ratings yet
- Verilog-Based Case Study of D-FlipFlopDocument7 pagesVerilog-Based Case Study of D-FlipFlopPritam BhattacharjeeNo ratings yet
- Maxpool SimulationDocument10 pagesMaxpool SimulationMahela EkanayakeNo ratings yet
- Experiment No.5, Simulation of DPSK Aim: To Plot The Bit Error Rate (BER) of Differential Phase Shift Keying (DPSK) Signal Using OCTAVEDocument5 pagesExperiment No.5, Simulation of DPSK Aim: To Plot The Bit Error Rate (BER) of Differential Phase Shift Keying (DPSK) Signal Using OCTAVEvanitha100% (2)
- Finite State Machine (FSM) : ExampleDocument22 pagesFinite State Machine (FSM) : ExamplemanudzinerNo ratings yet
- סיכום תמציתי של פקודות ותחביר ב-VHDLDocument4 pagesסיכום תמציתי של פקודות ותחביר ב-VHDLRonNo ratings yet
- Learn Digital and Microprocessor Techniques On Your Smartphone: Portable Learning, Reference and Revision Tools.From EverandLearn Digital and Microprocessor Techniques On Your Smartphone: Portable Learning, Reference and Revision Tools.No ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Semester Schedule SP22Document1 pageSemester Schedule SP22shoaibkhaliqNo ratings yet
- PC To PC by 05DEC313 & 343Document40 pagesPC To PC by 05DEC313 & 343Pravin Gareta100% (2)
- Nadra Sample Marraige Registration CertificateDocument1 pageNadra Sample Marraige Registration CertificateshoaibkhaliqNo ratings yet
- ETEA GuideDocument30 pagesETEA Guideshoaibkhaliq0% (1)
- Dottorato Di Ricerca in Ingegneria Elettrica, Elettronica e Delle ComunicazioniDocument1 pageDottorato Di Ricerca in Ingegneria Elettrica, Elettronica e Delle ComunicazionishoaibkhaliqNo ratings yet
- Digital Design: An Embedded Systems Approach Using Verilog: Sequential BasicsDocument73 pagesDigital Design: An Embedded Systems Approach Using Verilog: Sequential Basicsavinash_yuvarajNo ratings yet
- Fixed-Point Multiplication and Division in The Logarithmic Number System: A Way To Low-Power DesignDocument9 pagesFixed-Point Multiplication and Division in The Logarithmic Number System: A Way To Low-Power DesignAnjuJoseTomKarukappallilNo ratings yet
- Midrange 8-Bit PIC Microcontrollers: MGR, RJ 1Document115 pagesMidrange 8-Bit PIC Microcontrollers: MGR, RJ 1Mohan Kumar NNo ratings yet
- DSP Using FpgaDocument10 pagesDSP Using FpgaAbdulhussain AmravatiwalaNo ratings yet
- CHINT Industrial Control Instruments Catalogue PDFDocument38 pagesCHINT Industrial Control Instruments Catalogue PDFChint BoliviaNo ratings yet
- Azuro ClockDocument20 pagesAzuro ClockPradeep Manigandan100% (1)
- SAR ADC TutorialDocument13 pagesSAR ADC Tutorialvigneshk100% (3)
- AM335x Schematic Checklist: Application ReportDocument11 pagesAM335x Schematic Checklist: Application ReportN PNo ratings yet
- P89C51RB2/P89C51RC2/P89C51RD2: 80C51 8-Bit Flash Microcontroller FamilyDocument52 pagesP89C51RB2/P89C51RC2/P89C51RD2: 80C51 8-Bit Flash Microcontroller FamilyÁrpád HimpliNo ratings yet
- Asynchronous FIFO FinalDocument16 pagesAsynchronous FIFO FinalAyush Katyal100% (1)
- Chapter8 CompleteDocument39 pagesChapter8 CompletegrieverslhNo ratings yet
- E-Series Troubleshooting GuideDocument18 pagesE-Series Troubleshooting GuideHamilton GutierrezNo ratings yet
- PIC16C84: EEPROM Memory Programming SpecificationDocument14 pagesPIC16C84: EEPROM Memory Programming SpecificationMekkati MekkatiNo ratings yet
- CDN DDR CTRL 16ffc Datasheet v1.0Document40 pagesCDN DDR CTRL 16ffc Datasheet v1.0JanakiramanRamanathanNo ratings yet
- EMC Guidelines For MPC5500-Based Systems: 1 DisclaimersDocument16 pagesEMC Guidelines For MPC5500-Based Systems: 1 DisclaimersfengheNo ratings yet
- Unit - 1 and 2: B.E.,/B.Tech., Electronics and Communication Engineering Reg 2008Document6 pagesUnit - 1 and 2: B.E.,/B.Tech., Electronics and Communication Engineering Reg 2008D Geetha DuraiNo ratings yet
- Clock Domain ClockingDocument12 pagesClock Domain Clockingarunsrl100% (1)
- Basic Performance EquationDocument2 pagesBasic Performance EquationComputer NotesNo ratings yet
- ASIC DesignDocument32 pagesASIC DesignAhsan MalikNo ratings yet
- Signaltap II Embedded Logic AnalyzerDocument82 pagesSignaltap II Embedded Logic AnalyzerAmit JainNo ratings yet
- Advanced Microprocessors: Dr. Hetal PatelDocument29 pagesAdvanced Microprocessors: Dr. Hetal PatelAnasNo ratings yet
- Vestel STB: Service ManualDocument67 pagesVestel STB: Service ManualnaughtybigboyNo ratings yet
- At Speed OccDocument5 pagesAt Speed OccAdhi SuruliNo ratings yet
- CH 8Document25 pagesCH 8eyobeshete01No ratings yet
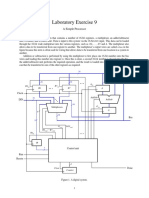
- Laboratory Exercise 9: A Simple ProcessorDocument8 pagesLaboratory Exercise 9: A Simple ProcessorhxchNo ratings yet
- Toyocom Cristal OscillatorsDocument58 pagesToyocom Cristal Oscillatorsb33g33100% (1)
- MdriveDocument104 pagesMdriveAlejandroSosaVieraNo ratings yet
- Timing Diagram PDFDocument8 pagesTiming Diagram PDFSneha SinghNo ratings yet
- DCEPFDocument11 pagesDCEPFkanishkhatanaNo ratings yet