You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Study Course PDFDocument295 pagesStudy Course PDFSiv BibiNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Questions and Answers: February 2004Document5 pagesQuestions and Answers: February 2004ocigranNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Study Course PDFDocument295 pagesStudy Course PDFSiv BibiNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Ableton Shortcuts PDFDocument9 pagesAbleton Shortcuts PDFlucasNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Robert Lederman, The Human Genome Project and EugenicsDocument5 pagesRobert Lederman, The Human Genome Project and EugenicsocigranNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Meyl Micro To Macrocosm CertDocument7 pagesMeyl Micro To Macrocosm CertocigranNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Thez ELKS Magazine 1956-08CDocument60 pagesThez ELKS Magazine 1956-08CocigranNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- NSSM 200 Kissinger Genocide Report 1974Document123 pagesNSSM 200 Kissinger Genocide Report 1974Guy Razer100% (12)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Act400011975eng PDFDocument125 pagesAct400011975eng PDFocigran100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Summary of The Invisible Rainbow A History of Electricity and Life - Arthur FirstenbergDocument17 pagesSummary of The Invisible Rainbow A History of Electricity and Life - Arthur FirstenbergKaVO88% (8)
- Technocracy, Social Engineering, and The Good Life in 20th-Century AmericaDocument23 pagesTechnocracy, Social Engineering, and The Good Life in 20th-Century AmericaocigranNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- 0000969741Document17 pages0000969741ocigranNo ratings yet
- Bloomberg Central BanksDocument31 pagesBloomberg Central BanksocigranNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Day 10 - Technocracy and EducationDocument4 pagesDay 10 - Technocracy and EducationocigranNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Day 6 - Technocracy's Necessary RequirementsDocument5 pagesDay 6 - Technocracy's Necessary RequirementsocigranNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Global 2000 Report To The PresidentDocument11 pagesThe Global 2000 Report To The PresidentocigranNo ratings yet
- Day 11 - Technocracy and The Rise of Techno-PopulismDocument4 pagesDay 11 - Technocracy and The Rise of Techno-PopulismocigranNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Day 8 - Technocracy and Central BanksDocument4 pagesDay 8 - Technocracy and Central Banksocigran100% (1)
- Day 3 - Technocracy in Europe and AmericaDocument4 pagesDay 3 - Technocracy in Europe and AmericaocigranNo ratings yet
- Day 12 - Rejecting TechnocracyDocument4 pagesDay 12 - Rejecting TechnocracyocigranNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Day 7 - China Is A TechnocracyDocument5 pagesDay 7 - China Is A TechnocracyocigranNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Day 5 - The Fitting of Technocracy and TranshumanismDocument5 pagesDay 5 - The Fitting of Technocracy and TranshumanismocigranNo ratings yet
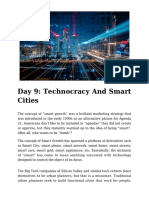
- Day 9 - Technocracy and Smart CitiesDocument5 pagesDay 9 - Technocracy and Smart CitiesocigranNo ratings yet
- Day 4 - Technocracy vs. Communism - Socialism, FascismDocument6 pagesDay 4 - Technocracy vs. Communism - Socialism, FascismocigranNo ratings yet
- 4 710d ManualDocument43 pages4 710d ManualocigranNo ratings yet
- How To Mix A Pop Song From Scratch - Ver 2.0Document64 pagesHow To Mix A Pop Song From Scratch - Ver 2.0Sebi Ivan100% (1)
- Day 1 - We Were Warned About TechnocracyDocument3 pagesDay 1 - We Were Warned About TechnocracyocigranNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
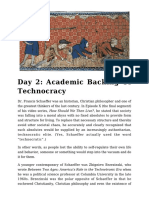
- Day 2 - Academic Backing of TechnocracyDocument4 pagesDay 2 - Academic Backing of TechnocracyocigranNo ratings yet
- Pros Guide To CompressionDocument3 pagesPros Guide To CompressionCatalin FilipNo ratings yet
- C l2 - Hands-On AssignmentDocument8 pagesC l2 - Hands-On AssignmentRitu Singh BhadauriaNo ratings yet
- Asst Programmer QuestionDocument7 pagesAsst Programmer Questionsajid_391No ratings yet
- Practical FileDocument64 pagesPractical FileSoumalya RoyNo ratings yet
- CS125 - Lab 01 - Programing BasicsDocument4 pagesCS125 - Lab 01 - Programing BasicsasadhppyNo ratings yet
- Oops ProgrammingDocument312 pagesOops ProgrammingSweetsoulUroojMalikNo ratings yet
- BCA-101: Communicative EnglishDocument23 pagesBCA-101: Communicative EnglishmkpbhuNo ratings yet
- JavaDocument143 pagesJavaPramod SinghNo ratings yet
- Java Full NotesDocument92 pagesJava Full NotesChandan Kumar JhaNo ratings yet
- Java NotesDocument71 pagesJava Notesmallareddy_pindiNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- A Python Book - Beginning Python, Advanced Python, and Python Exercises PDFDocument246 pagesA Python Book - Beginning Python, Advanced Python, and Python Exercises PDFSandeep NayalNo ratings yet
- C and C++ ReportDocument29 pagesC and C++ Reportsumitbatra203100% (2)
- Free Fingerprint Verification SDKDocument92 pagesFree Fingerprint Verification SDKniluxerNo ratings yet
- 1.FP201-1.Intro To C++ProgrammingDocument21 pages1.FP201-1.Intro To C++ProgrammingArun GanesanNo ratings yet
- PF - Lab - 11 - PointersDocument22 pagesPF - Lab - 11 - PointersIrtaza Ali NasirNo ratings yet
- r16 Syllabus Cse JntuhDocument58 pagesr16 Syllabus Cse Jntuhramakanth83No ratings yet
- Data Structure Using C++ - Elective IIIDocument2 pagesData Structure Using C++ - Elective IIIsneha_eceNo ratings yet
- Vamshi C++ 3Document15 pagesVamshi C++ 3Pragnya RajNo ratings yet
- Fundamentals of Programming II Course ContentDocument41 pagesFundamentals of Programming II Course ContentSamuel AwgichewNo ratings yet
- Mysql Connector/C++ Developer GuideDocument76 pagesMysql Connector/C++ Developer GuidePedro BazóNo ratings yet
- Vector Cast PIC Controller FeasibilityDocument23 pagesVector Cast PIC Controller FeasibilityyusuphsterNo ratings yet
- Fundamentals of ProgrammingDocument29 pagesFundamentals of ProgrammingJustine May POSTUDANNo ratings yet
- Jinendra Major ProjectDocument127 pagesJinendra Major ProjectArham KhanNo ratings yet
- HP Vertica 7.1.x ExtendingHPVerticaDocument256 pagesHP Vertica 7.1.x ExtendingHPVerticaRahul VishwakarmaNo ratings yet
- Happy Foaming With Py FoamDocument66 pagesHappy Foaming With Py FoamivanmatijevicNo ratings yet
- Transition From C++ To JavaDocument37 pagesTransition From C++ To JavaVinay Kumar BollineniNo ratings yet
- COS1512 501 - 2010 - 3 - BDocument40 pagesCOS1512 501 - 2010 - 3 - BLina Slabbert-van Der WaltNo ratings yet
- Atm (Shiv Kumar)Document122 pagesAtm (Shiv Kumar)Amit VermaNo ratings yet
- BPLCK 205d Module 1 Introduction To C++Document27 pagesBPLCK 205d Module 1 Introduction To C++Mohammed owaisNo ratings yet
- Object Oriented Technic Notes (Unit4)Document69 pagesObject Oriented Technic Notes (Unit4)Amir KhanNo ratings yet
- TXSeries For Multiplatforms Application Programming Guide Version 6.2Document351 pagesTXSeries For Multiplatforms Application Programming Guide Version 6.2deisecairoNo ratings yet
- Computer Science: A Concise IntroductionFrom EverandComputer Science: A Concise IntroductionRating: 4.5 out of 5 stars4.5/5 (14)
- CompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)From EverandCompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)Rating: 5 out of 5 stars5/5 (1)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (227)
- Chip War: The Fight for the World's Most Critical TechnologyFrom EverandChip War: The Fight for the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (82)