You might also like
- Assesment of ROCPAD RelayDocument8 pagesAssesment of ROCPAD RelayChamod KariyawasamNo ratings yet
- Inc ConductanceDocument6 pagesInc Conductanceelif denizNo ratings yet
- A Pc-Cluster Based Fully Digital Real-Time Simulation of A Field-Oriented Speed Controller For An Induction MotorDocument25 pagesA Pc-Cluster Based Fully Digital Real-Time Simulation of A Field-Oriented Speed Controller For An Induction MotorSahabat SimatupangNo ratings yet
- Regular Paper Stand-Alone PV System Simulation For DG Applications, Part I: PV Module Modeling and Inverters Adel El ShahatDocument19 pagesRegular Paper Stand-Alone PV System Simulation For DG Applications, Part I: PV Module Modeling and Inverters Adel El Shahatyong_fanNo ratings yet
- 1 s2.0 S1876610215005342 Main PDFDocument9 pages1 s2.0 S1876610215005342 Main PDFVinod KohliNo ratings yet
- Implementation in Arduino of MPPT Using Variable SDocument10 pagesImplementation in Arduino of MPPT Using Variable SHassen BrahimNo ratings yet
- Output Power Maximization of Partially Shaded 44 PDocument12 pagesOutput Power Maximization of Partially Shaded 44 PMARTIN TIRKEYNo ratings yet
- Position Sensorless Control of PMSM Based on MRASDocument4 pagesPosition Sensorless Control of PMSM Based on MRAShaithamNo ratings yet
- Density Based Traffic Light ControllingDocument39 pagesDensity Based Traffic Light Controllingsantosh426No ratings yet
- SEPIC Converter Based Photovoltaic Syste PDFDocument6 pagesSEPIC Converter Based Photovoltaic Syste PDFRahardian TristantoNo ratings yet
- Condition Assessment of Transformer by Park's Vector and Symmetrical Components To Detect Inter Turn FaultDocument6 pagesCondition Assessment of Transformer by Park's Vector and Symmetrical Components To Detect Inter Turn FaultdimasairlanggaNo ratings yet
- An Efficient Differential Conditional Capturing Energy Recovery Flip-Flop DesignDocument6 pagesAn Efficient Differential Conditional Capturing Energy Recovery Flip-Flop DesignRaghul RamasamyNo ratings yet
- Automatic Control System of Speed of Synchronous Motor: SciencedirectDocument6 pagesAutomatic Control System of Speed of Synchronous Motor: SciencedirectRedkit ofFootHillNo ratings yet
- Maximum Power Point Tracking Using Fuzzy Logic Controller Under Partial ConditionsDocument14 pagesMaximum Power Point Tracking Using Fuzzy Logic Controller Under Partial Conditionsaravindan476No ratings yet
- Over Load Protection For TransformerDocument45 pagesOver Load Protection For Transformerupender_kalwaNo ratings yet
- A Comparative Analysis of Power Efficient Flip Flops IJERTV1IS3048Document8 pagesA Comparative Analysis of Power Efficient Flip Flops IJERTV1IS3048Rao MallikarjunNo ratings yet
- Content ServerDocument18 pagesContent Serverayoub reseauNo ratings yet
- Fuzzy and P&O Based MPPT Controllers Under Different ConditionsDocument8 pagesFuzzy and P&O Based MPPT Controllers Under Different ConditionsAlhandasy 80No ratings yet
- To Study, Analyse and Implement MPPT PandO Based Photovoltaic PV System Using PID ControllerDocument4 pagesTo Study, Analyse and Implement MPPT PandO Based Photovoltaic PV System Using PID ControllerEditor IJTSRDNo ratings yet
- Know Any Question Atleast Try To Write Relevant AnswerDocument2 pagesKnow Any Question Atleast Try To Write Relevant AnswerjayakumarNo ratings yet
- M ErginSahinDocument9 pagesM ErginSahinbbb bbbNo ratings yet
- SensorlessSlowdown IEEE-EnCv24-1 2009Document8 pagesSensorlessSlowdown IEEE-EnCv24-1 2009DineshkumarrrrNo ratings yet
- Thakran 2018Document4 pagesThakran 2018ShubhamNo ratings yet
- Fuzzy Logic Controller To Improve Photovoltaic Water Pumping System PerformanceDocument5 pagesFuzzy Logic Controller To Improve Photovoltaic Water Pumping System PerformanceDhinu LalNo ratings yet
- Sirigu 2016Document13 pagesSirigu 2016veepekayNo ratings yet
- A Project Report On Bridge RectifierDocument44 pagesA Project Report On Bridge RectifierTirthankar Mohanty43% (14)
- Rodriguez 2019 IOP Conf. Ser. Mater. Sci. Eng. 707 012003Document8 pagesRodriguez 2019 IOP Conf. Ser. Mater. Sci. Eng. 707 012003abhinavparkheNo ratings yet
- International Journal of Integrated Sciences & Technology SimulationDocument10 pagesInternational Journal of Integrated Sciences & Technology SimulationKhangBomNo ratings yet
- High Overhead Flip-Flop Alert Dependent On Time Slack Control Charge SharingDocument12 pagesHigh Overhead Flip-Flop Alert Dependent On Time Slack Control Charge SharingIJRASETPublicationsNo ratings yet
- 92 C 5 CDD 990 Aef 1 BaDocument7 pages92 C 5 CDD 990 Aef 1 Bamisbahrajpoot875No ratings yet
- Backstepping_control_for_an_induction_moDocument6 pagesBackstepping_control_for_an_induction_moNguyễn Văn HoàNo ratings yet
- The Use of Genetic Algorithms For Speed and Current Controller Designs For IPMSM DriveDocument6 pagesThe Use of Genetic Algorithms For Speed and Current Controller Designs For IPMSM DrivebarbieNo ratings yet
- Fractional Order Extremum Seeking Approach For MPPTDocument11 pagesFractional Order Extremum Seeking Approach For MPPTMohamed Ali ElshehamyNo ratings yet
- Modularized Control Strategy and Performance Analysis of DFIG System Under Unbalanced and Harmonic Grid VoltageDocument12 pagesModularized Control Strategy and Performance Analysis of DFIG System Under Unbalanced and Harmonic Grid VoltageRajesh KannanNo ratings yet
- Experimental Test Bench of Photovoltaic Systems Using Backstepping MPPT AlgorithmDocument9 pagesExperimental Test Bench of Photovoltaic Systems Using Backstepping MPPT AlgorithmMokhlis MohcineNo ratings yet
- Step-Size: ImplementationDocument4 pagesStep-Size: Implementationyousaf hameedNo ratings yet
- Low-cost potentiostat construction and testingDocument9 pagesLow-cost potentiostat construction and testingDhammika RathnayakeNo ratings yet
- STATCOMs Contribution To The ImprovementDocument12 pagesSTATCOMs Contribution To The ImprovementNavjot SinghNo ratings yet
- Output Power Maximization of Partially Shaded 4 4 PV Field by Altering Its TopologyDocument11 pagesOutput Power Maximization of Partially Shaded 4 4 PV Field by Altering Its Topologypalpandian.mNo ratings yet
- The Simulation and Experimental Results of Dynamic Behaviour of Torque Motor Having Permanent MagnetsDocument7 pagesThe Simulation and Experimental Results of Dynamic Behaviour of Torque Motor Having Permanent MagnetsessameldinNo ratings yet
- Design and Implementation of S R Flip Flop For Efficient Power Using CMOS 90nm TechnologyDocument4 pagesDesign and Implementation of S R Flip Flop For Efficient Power Using CMOS 90nm TechnologyijsretNo ratings yet
- ANALYSIS OF PWM TECHNIQUES APPLIED TO HALF BRIDGE ANPC INVERTER CONNECTED TO GRID Ijariie3291Document11 pagesANALYSIS OF PWM TECHNIQUES APPLIED TO HALF BRIDGE ANPC INVERTER CONNECTED TO GRID Ijariie3291fgokcegozNo ratings yet
- FPGA-based solar tracking system with fuzzy controlDocument5 pagesFPGA-based solar tracking system with fuzzy controlMilton Andre MarzzNo ratings yet
- Design and Development of Maximum Power Point Tracking (MPPT) For 100 Watt Solar Panel Base On Buck Boost ConverterDocument10 pagesDesign and Development of Maximum Power Point Tracking (MPPT) For 100 Watt Solar Panel Base On Buck Boost ConverterOle Johan BondahlNo ratings yet
- Compact Maximum Power Point Tracking of Solar Photovoltaic Systems Using Analog IcsDocument7 pagesCompact Maximum Power Point Tracking of Solar Photovoltaic Systems Using Analog Icsسعيد ابوسريعNo ratings yet
- UPFC Control Based On New IP Type Controller: Mojtaba Shirvani, Babak Keyvani, Mostafa Abdollahi and Ahmad MemaripourDocument8 pagesUPFC Control Based On New IP Type Controller: Mojtaba Shirvani, Babak Keyvani, Mostafa Abdollahi and Ahmad MemaripourMmillion AlemayehuNo ratings yet
- Design and Realization of An Autonomous Solar Syst PDFDocument10 pagesDesign and Realization of An Autonomous Solar Syst PDFashish kumarNo ratings yet
- Optim 2014 BanuDocument7 pagesOptim 2014 BanuAliza SharifNo ratings yet
- SEPIC Converter Based Photovoltaic System With Particle Swarm Optimization MPPTDocument6 pagesSEPIC Converter Based Photovoltaic System With Particle Swarm Optimization MPPTWARSE JournalsNo ratings yet
- Simulation of Photovoltaic Cell Using Matlab: Vijay Garg, Sandeep SainiDocument4 pagesSimulation of Photovoltaic Cell Using Matlab: Vijay Garg, Sandeep SainitheijesNo ratings yet
- Design and Development of Maximum Power Point Tracking (MPPT) For 100 Watt Solar Panel Base On Buck Boost ConverterDocument10 pagesDesign and Development of Maximum Power Point Tracking (MPPT) For 100 Watt Solar Panel Base On Buck Boost ConverterFajar MaulanaNo ratings yet
- Design of Fault Tolerant System For The On-Board Computer of Studsat-2Document1 pageDesign of Fault Tolerant System For The On-Board Computer of Studsat-2ShrinivasPaiNo ratings yet
- By Robert Prieto, Associate Professor, Universidad: Power Electronics Technology March 2005Document5 pagesBy Robert Prieto, Associate Professor, Universidad: Power Electronics Technology March 2005Constantin DorinelNo ratings yet
- Improved Operation of DFIG Based Wind Generation Systems Under Network UnbalanceDocument8 pagesImproved Operation of DFIG Based Wind Generation Systems Under Network UnbalanceR0B0T2013No ratings yet
- Photo Volt 111Document5 pagesPhoto Volt 111makroumNo ratings yet
- TESEMUITOIMPDocument5 pagesTESEMUITOIMProgeriocorrea601No ratings yet
- Single Phase Fault DetectorDocument23 pagesSingle Phase Fault DetectoriykedigitalNo ratings yet
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsFrom EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNo ratings yet
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsFrom EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsRating: 1 out of 5 stars1/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Dr. Saeed TableDocument2 pagesDr. Saeed Tableسعيد ابوسريعNo ratings yet
- Contributor Role InstructionDocument1 pageContributor Role InstructionDevendra Reddy BandiNo ratings yet
- A Distributed SPICE-model of A Solar Cell: IEEE Transactions On Electron Devices June 1996Document11 pagesA Distributed SPICE-model of A Solar Cell: IEEE Transactions On Electron Devices June 1996سعيد ابوسريعNo ratings yet
- ESP532Document1 pageESP532سعيد ابوسريعNo ratings yet
- نونوDocument11 pagesنونوسعيد ابوسريعNo ratings yet
- LinksDocument3 pagesLinksسعيد ابوسريعNo ratings yet
- LinksDocument3 pagesLinksسعيد ابوسريعNo ratings yet
- Read MeDocument2 pagesRead Meسعيد ابوسريعNo ratings yet
- LinksDocument3 pagesLinksسعيد ابوسريعNo ratings yet
- Indoor Localization System Using Wireless Sensor NetworkDocument10 pagesIndoor Localization System Using Wireless Sensor Networkسعيد ابوسريعNo ratings yet
- LinksDocument3 pagesLinksسعيد ابوسريعNo ratings yet
- ESP32Document1 pageESP32سعيد ابوسريعNo ratings yet
- Efficient battery power for wearable sensor nodesDocument3 pagesEfficient battery power for wearable sensor nodesسعيد ابوسريعNo ratings yet
- If You Are Charging A Battery of 3000-3800 Mah Capacity, The Current Offered Is Approximately 1000ma Which Is GoodDocument1 pageIf You Are Charging A Battery of 3000-3800 Mah Capacity, The Current Offered Is Approximately 1000ma Which Is Goodسعيد ابوسريعNo ratings yet
- If You Are Charging A Battery of 3000-3800 Mah Capacity, The Current Offered Is Approximately 1000ma Which Is GoodDocument1 pageIf You Are Charging A Battery of 3000-3800 Mah Capacity, The Current Offered Is Approximately 1000ma Which Is Goodسعيد ابوسريعNo ratings yet
- HTRYDocument7 pagesHTRYسعيد ابوسريعNo ratings yet
- If You Are Charging A Battery of 3000-3800 Mah Capacity, The Current Offered Is Approximately 1000ma Which Is GoodDocument1 pageIf You Are Charging A Battery of 3000-3800 Mah Capacity, The Current Offered Is Approximately 1000ma Which Is Goodسعيد ابوسريعNo ratings yet
- TP4056 English DocumentationDocument3 pagesTP4056 English DocumentationsuocNo ratings yet
- Efficient battery power for wearable sensor nodesDocument3 pagesEfficient battery power for wearable sensor nodesسعيد ابوسريعNo ratings yet
- Efficient battery power for wearable sensor nodesDocument3 pagesEfficient battery power for wearable sensor nodesسعيد ابوسريعNo ratings yet
- Efficient battery power for wearable sensor nodesDocument3 pagesEfficient battery power for wearable sensor nodesسعيد ابوسريعNo ratings yet
- Sheet PowerDocument2 pagesSheet Powerسعيد ابوسريعNo ratings yet
- Efficient battery power for wearable sensor nodesDocument3 pagesEfficient battery power for wearable sensor nodesسعيد ابوسريعNo ratings yet
- Uoyhuadaptive Fuzzy Proportional Integral Derivative CoDocument9 pagesUoyhuadaptive Fuzzy Proportional Integral Derivative Coسعيد ابوسريعNo ratings yet
- Efficient battery power for wearable sensor nodesDocument3 pagesEfficient battery power for wearable sensor nodesسعيد ابوسريعNo ratings yet
- TewDocument13 pagesTewسعيد ابوسريعNo ratings yet
- Efficient battery power for wearable sensor nodesDocument3 pagesEfficient battery power for wearable sensor nodesسعيد ابوسريعNo ratings yet
- PSIM HelpDocument8 pagesPSIM HelpFayyaz KashifNo ratings yet
- EMDDocument7 pagesEMDAnonymous 7X8q2fTb8dNo ratings yet
- CPE PRACTICE TEST 2 READINGDocument4 pagesCPE PRACTICE TEST 2 READINGHong Anh0% (1)
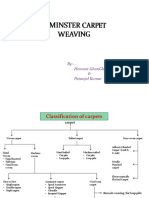
- Axminster CarpetDocument19 pagesAxminster Carpetrohit sinhaNo ratings yet
- Data Sheet 2.07 Issue A: Water Flow Detector Model: WFDENDocument2 pagesData Sheet 2.07 Issue A: Water Flow Detector Model: WFDENOvidiu GavrilasNo ratings yet
- Oneccc Detection Assignment Grupo1.Ipynb - ColaboratoryDocument9 pagesOneccc Detection Assignment Grupo1.Ipynb - ColaboratoryAna VelezNo ratings yet
- JASA 1st Anniversary Issue 2012 PDFDocument103 pagesJASA 1st Anniversary Issue 2012 PDFSuresh NatarajanNo ratings yet
- Manual CastingDocument64 pagesManual CastingDjRacksNo ratings yet
- Product Information: Traffic Management AccessoryDocument12 pagesProduct Information: Traffic Management AccessoryCORAL ALONSONo ratings yet
- RFIADocument11 pagesRFIAMary Joy TorresNo ratings yet
- Me 6401 Kom - Uti Ans KeyDocument11 pagesMe 6401 Kom - Uti Ans Keylogeshboy007100% (1)
- Introduction: Use Chapter 2 Section 2 in Your Flexbook To Define The FollowingDocument5 pagesIntroduction: Use Chapter 2 Section 2 in Your Flexbook To Define The FollowingNathalieNo ratings yet
- Science Technologyand International RelationsDocument20 pagesScience Technologyand International RelationsMuhammad HussainNo ratings yet
- College of Nursing: Assignment ON Nursing ClinicDocument5 pagesCollege of Nursing: Assignment ON Nursing ClinicPriyaNo ratings yet
- GPS Navigator: ModelDocument99 pagesGPS Navigator: ModelMain UddinNo ratings yet
- BS en 10108-2004Document14 pagesBS en 10108-2004Martijn GrootNo ratings yet
- AC Circuit 2 (Three-Phase)Document2 pagesAC Circuit 2 (Three-Phase)marlon desaculaNo ratings yet
- Crusher Type Part Number Description Weight (KG)Document3 pagesCrusher Type Part Number Description Weight (KG)Juvenal CorreiaNo ratings yet
- AbstractsDocument224 pagesAbstractsFrankmerced Emerzon Farfan HuancaNo ratings yet
- Output Configurations and Connections: NPN Open CollectorDocument2 pagesOutput Configurations and Connections: NPN Open Collectordorin serbanNo ratings yet
- CHM4943 Wastewater TreatmentDocument7 pagesCHM4943 Wastewater TreatmentUsman GhaniNo ratings yet
- Soal Big A Tukpd 2011-2012 RevisiDocument5 pagesSoal Big A Tukpd 2011-2012 RevisiTriana WatiNo ratings yet
- Incorrect Fuel Level Indication RepairDocument3 pagesIncorrect Fuel Level Indication RepairBogdan StefanNo ratings yet
- A Project Report On: "Recreation Club"Document80 pagesA Project Report On: "Recreation Club"Appz100% (2)
- Megger FORMDocument1 pageMegger FORMCOSMOPOLITAN M&ENo ratings yet
- Application of Operations Research in Banking FinanceDocument13 pagesApplication of Operations Research in Banking FinanceInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Intelligence, Reasoning, Creativity, and WisdomDocument3 pagesIntelligence, Reasoning, Creativity, and WisdomSammy DeeNo ratings yet
- Connorized Classical CatalogDocument37 pagesConnorized Classical CatalogPablo Olea RodríguezNo ratings yet
- English Idea BookDocument2 pagesEnglish Idea Bookapi-551731988No ratings yet
- Rec2009 025 PDFDocument172 pagesRec2009 025 PDFEkaStaVTVNo ratings yet
- World Ranking For Industrial Trucks DHF 2015Document2 pagesWorld Ranking For Industrial Trucks DHF 2015MA TotalforkliftNo ratings yet