You might also like
- FireShot Capture 034 - What Is MCB, Construction, Working, Types of MCB B, C, D, K - ElectDocument1 pageFireShot Capture 034 - What Is MCB, Construction, Working, Types of MCB B, C, D, K - ElectDINESHNo ratings yet
- FireShot Capture 037 - Forward & Reverse Direction of Induction Motor and DC Motor - ElectriDocument1 pageFireShot Capture 037 - Forward & Reverse Direction of Induction Motor and DC Motor - ElectriDINESHNo ratings yet
- FireShot Capture 035 - Why PT Burden Is High Compare With CT Burden - Electrical4uDocument1 pageFireShot Capture 035 - Why PT Burden Is High Compare With CT Burden - Electrical4uDINESHNo ratings yet
- FireShot Capture 026 - Earthing Procedure For Electrical Panel & Home Appliances - ElectricaDocument1 pageFireShot Capture 026 - Earthing Procedure For Electrical Panel & Home Appliances - ElectricaDINESHNo ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- FireShot Capture 036 - Why Capacitor Is Required For Single Phase Motor - Electrical4uDocument1 pageFireShot Capture 036 - Why Capacitor Is Required For Single Phase Motor - Electrical4uDINESHNo ratings yet
- FireShot Capture 029 - What Is Normally Open & What Is Normally Closed (Video Included) - ElDocument1 pageFireShot Capture 029 - What Is Normally Open & What Is Normally Closed (Video Included) - ElDINESHNo ratings yet
- FireShot Capture 032 - What Is Busbar Current Carrying Capacity Calculation 5 Types of BusbaDocument1 pageFireShot Capture 032 - What Is Busbar Current Carrying Capacity Calculation 5 Types of BusbaDINESHNo ratings yet
- FireShot Capture 031 - What Is MPCB, Working, Construction, Selection, AdvantageDocument1 pageFireShot Capture 031 - What Is MPCB, Working, Construction, Selection, AdvantageDINESHNo ratings yet
- FireShot Capture 028 - Top 6 Difference Between Copper and Aluminium Cables - Electrical4uDocument1 pageFireShot Capture 028 - Top 6 Difference Between Copper and Aluminium Cables - Electrical4uDINESHNo ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- FireShot Capture 032 - What Is Busbar Current Carrying Capacity Calculation 5 Types of BusbaDocument1 pageFireShot Capture 032 - What Is Busbar Current Carrying Capacity Calculation 5 Types of BusbaDINESHNo ratings yet
- Electrical Earthing - Definition, Types of Electrical Earthing & GroundingDocument8 pagesElectrical Earthing - Definition, Types of Electrical Earthing & GroundingDINESHNo ratings yet
- FireShot Capture 028 - Top 6 Difference Between Copper and Aluminium Cables - Electrical4uDocument1 pageFireShot Capture 028 - Top 6 Difference Between Copper and Aluminium Cables - Electrical4uDINESHNo ratings yet
- FireShot Capture 031 - What Is MPCB, Working, Construction, Selection, AdvantageDocument1 pageFireShot Capture 031 - What Is MPCB, Working, Construction, Selection, AdvantageDINESHNo ratings yet
- CN Unit 5Document19 pagesCN Unit 5GokulakrishnanNo ratings yet
- FireShot Capture 029 - What Is Normally Open & What Is Normally Closed (Video Included) - ElDocument1 pageFireShot Capture 029 - What Is Normally Open & What Is Normally Closed (Video Included) - ElDINESHNo ratings yet
- FireShot Capture 026 - Earthing Procedure For Electrical Panel & Home Appliances - ElectricaDocument1 pageFireShot Capture 026 - Earthing Procedure For Electrical Panel & Home Appliances - ElectricaDINESHNo ratings yet
- Ibps Po' PDF: 25 Important Questions of Spotting The Error (English Language)Document7 pagesIbps Po' PDF: 25 Important Questions of Spotting The Error (English Language)DINESHNo ratings yet
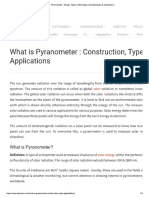
- Pyranometer - Design, Types, Advantages, Disadvantages & ApplicationsDocument8 pagesPyranometer - Design, Types, Advantages, Disadvantages & ApplicationsDINESHNo ratings yet
- Earthing Bonding Variable Speed DrivesDocument3 pagesEarthing Bonding Variable Speed DrivesDINESHNo ratings yet
- Drift Current and Diffusion Current and Their DifferencesDocument6 pagesDrift Current and Diffusion Current and Their DifferencesDINESHNo ratings yet
- Earthing Bonding Variable Speed DrivesDocument26 pagesEarthing Bonding Variable Speed Drivesmitesh.rivonkarNo ratings yet
- Blood Relation Questions For IBPS PO 2017Document7 pagesBlood Relation Questions For IBPS PO 2017sanjay shuklaNo ratings yet
- Residential Wiring Guide IntroductionDocument32 pagesResidential Wiring Guide Introductionfree bird100% (1)
- Unit 3Document32 pagesUnit 3RK KNo ratings yet
- 03 Slights Electrical Wiring PDFDocument39 pages03 Slights Electrical Wiring PDFDINESHNo ratings yet
- Electric Machinery Fundamentals-1Document28 pagesElectric Machinery Fundamentals-1AmaniDarwishNo ratings yet
- Unit 4Document67 pagesUnit 4RK KNo ratings yet
- CN Unit 2 - 2Document55 pagesCN Unit 2 - 2bhuvi2312No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Commissioner of Internal Revenue V CaDocument3 pagesCommissioner of Internal Revenue V CaJimenez LorenzNo ratings yet
- En 12485Document184 pagesEn 12485vishalmisalNo ratings yet
- Design and Construction of Water Supply SchemeDocument126 pagesDesign and Construction of Water Supply SchemeShreyansh SharmaNo ratings yet
- Why Delegate Authority and Empower EmployeesDocument5 pagesWhy Delegate Authority and Empower EmployeesHarold MaribojocNo ratings yet
- 8 - Vibration - F22-Vibration Isolation and AbsorptionDocument26 pages8 - Vibration - F22-Vibration Isolation and Absorptionالأردني JordanianNo ratings yet
- 3G Ardzyka Raka R 1910631030065 Assignment 8Document3 pages3G Ardzyka Raka R 1910631030065 Assignment 8Raka RamadhanNo ratings yet
- Marine Products Systems CatalogueDocument97 pagesMarine Products Systems CatalogueJhonnatan Quispe Franco100% (1)
- Essay 5 Practice Activities - DBS IntroductionsDocument6 pagesEssay 5 Practice Activities - DBS IntroductionsLeyla IsayevaNo ratings yet
- Business Analysis-Xiaomi 30.8.15Document8 pagesBusiness Analysis-Xiaomi 30.8.15ocgNo ratings yet
- Djiwandono, Indonesian Financial Crisis After Ten Years: Some Notes On Lessons Learned and ProspectsDocument12 pagesDjiwandono, Indonesian Financial Crisis After Ten Years: Some Notes On Lessons Learned and ProspectsMuhammad Arief Billah100% (1)
- MCB, MCCB, ElcbDocument3 pagesMCB, MCCB, ElcbMonirul Islam0% (1)
- Francisco v. Boiser PDFDocument12 pagesFrancisco v. Boiser PDFPia Christine BungubungNo ratings yet
- April 10, 2015 Strathmore TimesDocument28 pagesApril 10, 2015 Strathmore TimesStrathmore TimesNo ratings yet
- Aaliyah Lachance Resume - DecDocument2 pagesAaliyah Lachance Resume - Decapi-240831551No ratings yet
- Vda. de Consuegra v. Government Service Insurance System (1971)Document1 pageVda. de Consuegra v. Government Service Insurance System (1971)Andre Philippe RamosNo ratings yet
- Ipocc User Interface enDocument364 pagesIpocc User Interface enMarthaGutnaraNo ratings yet
- Time Division Muliple AccessDocument4 pagesTime Division Muliple AccessAbhishek RanaNo ratings yet
- Marie Campbell: Web DesignerDocument1 pageMarie Campbell: Web DesignerAli hossain AkashNo ratings yet
- Good Story Company Submission Cheat SheetDocument28 pagesGood Story Company Submission Cheat SheetRoseNo ratings yet
- RTC Ruling on Land Ownership Upheld by CADocument12 pagesRTC Ruling on Land Ownership Upheld by CAGladys BantilanNo ratings yet
- The Bedford Clanger May 2013 (The Beer Issue)Document12 pagesThe Bedford Clanger May 2013 (The Beer Issue)Erica RoffeNo ratings yet
- DTC CommandDocument3 pagesDTC CommandAod CsgNo ratings yet
- Planning For Good AcousticsDocument1 pagePlanning For Good Acousticsa_j_sanyal259No ratings yet
- Generator Exciter & Voltage ExciterDocument34 pagesGenerator Exciter & Voltage ExciterYasir MehmoodNo ratings yet
- January 2023: Top 10 Cited Articles in Computer Science & Information TechnologyDocument32 pagesJanuary 2023: Top 10 Cited Articles in Computer Science & Information TechnologyAnonymous Gl4IRRjzNNo ratings yet
- Masonry Design and DetailingDocument21 pagesMasonry Design and DetailingKIMBERLY ARGEÑALNo ratings yet
- A Case Study On Design of Ring Footing For Oil Storage Steel TankDocument6 pagesA Case Study On Design of Ring Footing For Oil Storage Steel Tankknight1729No ratings yet
- Office of The Integrity Commissioner - Investigation Report Regarding The Conduct of Councillor Mark Grimes (July 05, 2016)Document44 pagesOffice of The Integrity Commissioner - Investigation Report Regarding The Conduct of Councillor Mark Grimes (July 05, 2016)T.O. Nature & DevelopmentNo ratings yet
- Data Sheet 3VA2225-5HL32-0AA0: ModelDocument7 pagesData Sheet 3VA2225-5HL32-0AA0: ModelJENNYNo ratings yet
- Pe 1997 01Document108 pagesPe 1997 01franciscocampoverde8224No ratings yet