You might also like
- 30th Annual IEEE Conference on Industrial ElectronicsDocument6 pages30th Annual IEEE Conference on Industrial Electronicsdjoo77No ratings yet
- Simplified SVPWM Algorithm For Neutral Point Clamped 3-Level Inverter Fed DTC-IM DriveDocument6 pagesSimplified SVPWM Algorithm For Neutral Point Clamped 3-Level Inverter Fed DTC-IM DrivePasupuleti SivakumarNo ratings yet
- Direct Torque Control For Induction Motor Using Intelligent Artificial Neural Network TechniqueDocument7 pagesDirect Torque Control For Induction Motor Using Intelligent Artificial Neural Network TechniqueInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Comparative Analysis of Field Oriented Control of BLDC Motor Using SPWM and SVPWM TechniquesDocument6 pagesComparative Analysis of Field Oriented Control of BLDC Motor Using SPWM and SVPWM TechniquesTony starkNo ratings yet
- Virtual Flux Based Direct Power Control of Three-Phase PWM Rectifiers PDFDocument9 pagesVirtual Flux Based Direct Power Control of Three-Phase PWM Rectifiers PDFbensumbbNo ratings yet
- Digital Scalar Pulse Width Modulation Methods For Voltage Source Inverter Fed Ac DriveDocument7 pagesDigital Scalar Pulse Width Modulation Methods For Voltage Source Inverter Fed Ac DriveijsretNo ratings yet
- Generalized Rail Clamping Sequences Based PWM (GRCPWM) Algorithm For Direct Torque Controlled Induction Motor DriveDocument22 pagesGeneralized Rail Clamping Sequences Based PWM (GRCPWM) Algorithm For Direct Torque Controlled Induction Motor DriveHari ReddyNo ratings yet
- Im DTC 20162Document9 pagesIm DTC 20162Muhammad UmarNo ratings yet
- Full Text 302010Document8 pagesFull Text 302010belsebtiNo ratings yet
- Space Vector Pulse Width Modulation-Libre PDFDocument6 pagesSpace Vector Pulse Width Modulation-Libre PDFlongNo ratings yet
- New DTC Control Scheme For Induction Motors Fed With A Three-Level InverterDocument9 pagesNew DTC Control Scheme For Induction Motors Fed With A Three-Level InverterANKIT PRAJAPATINo ratings yet
- Ijrte0205288291 PDFDocument4 pagesIjrte0205288291 PDFPasupuleti SivakumarNo ratings yet
- Direct Torque Control For Induction Motors Based On Minimum Voltage Vector ErrorDocument11 pagesDirect Torque Control For Induction Motors Based On Minimum Voltage Vector ErrorSONU KUMARNo ratings yet
- Induction Motor ControlDocument4 pagesInduction Motor ControlJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Tuning of Control Loops For Grid Connected Voltage Source ConvertersDocument6 pagesTuning of Control Loops For Grid Connected Voltage Source ConvertersThiago Moura GalvãoNo ratings yet
- DC Link Measurements Based Sensorless Induction Motor Variable-Speed DriveDocument14 pagesDC Link Measurements Based Sensorless Induction Motor Variable-Speed DriveNationalinstituteDsnrNo ratings yet
- 245915-FinalDocument13 pages245915-FinalUtkarsh PrakashNo ratings yet
- ReviewofDTC TIE 2004Document15 pagesReviewofDTC TIE 2004MUSAIB UL FAYAZ 2022 17No ratings yet
- Direct Torque Control of PWM Inverter-Fed AC Motors - A SurveyDocument15 pagesDirect Torque Control of PWM Inverter-Fed AC Motors - A SurveyPraful YadavNo ratings yet
- Design and Analysis of General Rotor-Flux-Oriented Vector Control SystemsDocument8 pagesDesign and Analysis of General Rotor-Flux-Oriented Vector Control SystemsLeonardo Solis ZamoraNo ratings yet
- Analysis and Design of Three-Phase AC-to-DC Converters With High Power Factor and Near-Optimum FeedforwardDocument10 pagesAnalysis and Design of Three-Phase AC-to-DC Converters With High Power Factor and Near-Optimum FeedforwardTalha SadiqNo ratings yet
- Mathematical Analysis of SVPWM For Inverter Fed DTC of Induction Motor DriveDocument6 pagesMathematical Analysis of SVPWM For Inverter Fed DTC of Induction Motor DriveNicola Claudiu-IonelNo ratings yet
- DTC-SVM Scheme For Induction Motors Fed With A Three-Level InverterDocument5 pagesDTC-SVM Scheme For Induction Motors Fed With A Three-Level Inverterdam_dar666No ratings yet
- SPWM-based D - Digital Control For Paralleled 3 - Grid-Connected Inverters PDFDocument7 pagesSPWM-based D - Digital Control For Paralleled 3 - Grid-Connected Inverters PDF张明No ratings yet
- Speed Control of PMSM by Using DSVM - DTC TechniqueDocument5 pagesSpeed Control of PMSM by Using DSVM - DTC TechniqueKushagra KhamesraNo ratings yet
- Direct Torque Control of Brushless Doubly Fed Induction MachineDocument12 pagesDirect Torque Control of Brushless Doubly Fed Induction Machinejagarov4954No ratings yet
- FPGA Implementation On SVPWM MLIDocument5 pagesFPGA Implementation On SVPWM MLISheetal VermaNo ratings yet
- A Grid-Compatible Virtual Oscillator Controller Analysis and DesignDocument7 pagesA Grid-Compatible Virtual Oscillator Controller Analysis and DesignAdnan KutsiNo ratings yet
- Direct Torque ControlDocument5 pagesDirect Torque Controlvineeth kumarNo ratings yet
- Ijaiem 2013 08 25 054Document11 pagesIjaiem 2013 08 25 054International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Direct Power Control of An AFE Using Predictive ControlDocument8 pagesDirect Power Control of An AFE Using Predictive Controlknighthood4allNo ratings yet
- Education DTC 380 PDFDocument6 pagesEducation DTC 380 PDFНебојша МитровићNo ratings yet
- MPC Rizado TorqueDocument6 pagesMPC Rizado TorquesebastianG1995No ratings yet
- Ac/Dc/Ac: Control SystemDocument6 pagesAc/Dc/Ac: Control SystemFrancisco JimenezNo ratings yet
- Sensorless Three-Phase Induction Motor Direct TorqDocument7 pagesSensorless Three-Phase Induction Motor Direct TorqSakthivelNo ratings yet
- Direct Torque Control of PWM Inverter-FeDocument14 pagesDirect Torque Control of PWM Inverter-FeMarco ParedesNo ratings yet
- Comparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveDocument8 pagesComparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveMatanAbutbulNo ratings yet
- SVM-DTC induction motor controlDocument7 pagesSVM-DTC induction motor controlmaheswaranNo ratings yet
- A Variable-Speed, Sensorless, Induction Motor Drive Using DC Link MeasurementsDocument6 pagesA Variable-Speed, Sensorless, Induction Motor Drive Using DC Link Measurementsgowtam_raviNo ratings yet
- F11290486S319 PDFDocument8 pagesF11290486S319 PDFHari ReddyNo ratings yet
- Performance Analysis of Direct Torque Control of 3-Phase Induction MotorDocument6 pagesPerformance Analysis of Direct Torque Control of 3-Phase Induction MotormaheswaranNo ratings yet
- DC MotorDocument6 pagesDC MotoroshyenNo ratings yet
- A Method For Constructing Reduced Order Transformer Models For System Studies From Detailed Lumped Parameter ModelsDocument7 pagesA Method For Constructing Reduced Order Transformer Models For System Studies From Detailed Lumped Parameter ModelsIlona Dr. SmunczNo ratings yet
- Mahmud 2021Document14 pagesMahmud 2021Tiến ĐạttNo ratings yet
- Introducing The Low Switching Frequency Space Vector Modulated Multi-Modular Three-Level Converters For High Power Applications Switching StrategiesDocument6 pagesIntroducing The Low Switching Frequency Space Vector Modulated Multi-Modular Three-Level Converters For High Power Applications Switching StrategiesmaheshwareshwarNo ratings yet
- 2018 A Fast Model Predictive Control With Fixed Switching Frequency Based On Virtual Space Vector For Three-Phase InvertersDocument7 pages2018 A Fast Model Predictive Control With Fixed Switching Frequency Based On Virtual Space Vector For Three-Phase Invertersdaiduongxanh14113No ratings yet
- Model predictive control for multilevel invertersDocument12 pagesModel predictive control for multilevel invertersNassima BekhouchaNo ratings yet
- Adaptive Speed Identification For Vector Control of Induction Motors Without Rotational TransducersDocument18 pagesAdaptive Speed Identification For Vector Control of Induction Motors Without Rotational Transducersrudi tabutiNo ratings yet
- Performance Analysis On Direct Torque Controlled Induction Motor Drive With Varying Hysteresis Controller BandwidthDocument10 pagesPerformance Analysis On Direct Torque Controlled Induction Motor Drive With Varying Hysteresis Controller Bandwidthaswardi8756No ratings yet
- An Analysis On Switching Loss Optimized PWM Strategies For Three Phase PWM Voltage Source ConvertersDocument6 pagesAn Analysis On Switching Loss Optimized PWM Strategies For Three Phase PWM Voltage Source ConvertersGanesh ChallaNo ratings yet
- Simulation of PMSM Vector Control System Based On Non-Linear PID and Its Easy DSP RealizationDocument5 pagesSimulation of PMSM Vector Control System Based On Non-Linear PID and Its Easy DSP RealizationHarshali WavreNo ratings yet
- Paper 24Document6 pagesPaper 24Daniel G Canton PuertoNo ratings yet
- Fict Axis Emulation IeeeDocument10 pagesFict Axis Emulation IeeedevchandarNo ratings yet
- Sensorless Vector Controller for Synchronous Reluctance MotorsDocument9 pagesSensorless Vector Controller for Synchronous Reluctance MotorsUma SathyadevanNo ratings yet
- Modeling and simulation of speed control of induction motor using space vector modulationDocument9 pagesModeling and simulation of speed control of induction motor using space vector modulationMauricio LeañoNo ratings yet
- Simulation and Comparison of SPWM and SVPWM Techniques for InvertersDocument6 pagesSimulation and Comparison of SPWM and SVPWM Techniques for InvertersIkram RidhoNo ratings yet
- Untitled 1Document9 pagesUntitled 1sarita kumariNo ratings yet
- Different PWM Modulation Techniques Indexes Performance Evaluation, 1993.Document7 pagesDifferent PWM Modulation Techniques Indexes Performance Evaluation, 1993.Ali H. NumanNo ratings yet
- High Performance Digital Current Control in Three Phase Electrical Drives Ljiljana S. Peric, Slobodan N. VukosavicDocument22 pagesHigh Performance Digital Current Control in Three Phase Electrical Drives Ljiljana S. Peric, Slobodan N. Vukosavicankur rathiNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Space Vector Pulse Width Modulation Schemes For Two-Level Voltage Source InverterDocument5 pagesSpace Vector Pulse Width Modulation Schemes For Two-Level Voltage Source InverterIDESNo ratings yet
- SagDocument6 pagesSagLava KumarNo ratings yet
- Jifs 179406Document8 pagesJifs 179406Lava KumarNo ratings yet
- Spec Fuji Igbt600v150aDocument4 pagesSpec Fuji Igbt600v150aLava KumarNo ratings yet
- Fundamentals of Lighting and Lighting DesignDocument3 pagesFundamentals of Lighting and Lighting DesignLava KumarNo ratings yet
- Block Diagram of Signal GeneratorDocument2 pagesBlock Diagram of Signal GeneratorLava KumarNo ratings yet
- SagDocument6 pagesSagLava KumarNo ratings yet
- World's Largest Science, Technology & Medicine Open Access Book PublisherDocument17 pagesWorld's Largest Science, Technology & Medicine Open Access Book PublisherLava KumarNo ratings yet
- PDF Transmission and Distribution U A BakshiDocument1 pagePDF Transmission and Distribution U A BakshiLava Kumar0% (2)
- Special Oscilloscopes IIDocument3 pagesSpecial Oscilloscopes IILava KumarNo ratings yet
- Counselling PolicyDocument6 pagesCounselling PolicyLava KumarNo ratings yet
- Transco Electrical and Electronics Engineering SET ADocument16 pagesTransco Electrical and Electronics Engineering SET Aishak789No ratings yet
- Modeling and Simulation of Matrix Converter in MatlabDocument5 pagesModeling and Simulation of Matrix Converter in MatlabJisha KuruvillaNo ratings yet
- Hall Ticket Number R-15 Code 5G242 II B.Tech. II Semester Supplementary Examinations December 2017 Electrical Circuits-IIDocument8 pagesHall Ticket Number R-15 Code 5G242 II B.Tech. II Semester Supplementary Examinations December 2017 Electrical Circuits-IILava KumarNo ratings yet
- Entrance Examination SyllabusDocument18 pagesEntrance Examination Syllabusstalinrajesh143No ratings yet
- p1 PDFDocument7 pagesp1 PDFmohanNo ratings yet
- Building A Digital Storage OscilloscopeDocument56 pagesBuilding A Digital Storage Oscilloscopeskiziltoprak100% (2)
- PSDC1Document5 pagesPSDC1Lava KumarNo ratings yet
- My PresentationDocument16 pagesMy PresentationLava KumarNo ratings yet
- Speed Control of Induction MotorsDocument7 pagesSpeed Control of Induction MotorsLava KumarNo ratings yet
- 144 791 3 PBDocument16 pages144 791 3 PBLava KumarNo ratings yet
- IV B.Tech. II Semester Regular & Supplementary Examinations April 2017Document4 pagesIV B.Tech. II Semester Regular & Supplementary Examinations April 2017Lava KumarNo ratings yet
- 3deec529625986a5e0 PDFDocument16 pages3deec529625986a5e0 PDFEugineNo ratings yet
- Power Electronics Drives Exam QuestionsDocument4 pagesPower Electronics Drives Exam QuestionsLava KumarNo ratings yet
- 42 As 020517Document3 pages42 As 020517Lava KumarNo ratings yet
- Gun A Balan 2015Document6 pagesGun A Balan 2015Lava KumarNo ratings yet
- PDFDocument69 pagesPDFLava KumarNo ratings yet
- IM ModelingDocument27 pagesIM ModelingIrfan QureshiNo ratings yet
- Computer-Based Harmonic Generator FacilitiesDocument2 pagesComputer-Based Harmonic Generator FacilitiesLava KumarNo ratings yet
- DTC: A Motor Control Technique For All Seasons: Download Our DTC White PaperDocument3 pagesDTC: A Motor Control Technique For All Seasons: Download Our DTC White PaperLava KumarNo ratings yet
- Hunter Quayle - MHD - Annotated BibliographyDocument8 pagesHunter Quayle - MHD - Annotated Bibliographyapi-654030470No ratings yet
- Hotspot Shield VPNDocument3 pagesHotspot Shield VPNtsultimNo ratings yet
- vb8 Portable Data Collector, Analyzer and Balancer Datasheet - 116M5343Document9 pagesvb8 Portable Data Collector, Analyzer and Balancer Datasheet - 116M5343Camilo GutierrezNo ratings yet
- Manual Spg2500firman93dbDocument27 pagesManual Spg2500firman93dbAlexandra StanNo ratings yet
- What Is Meant by WBS Element and in What ScenarioDocument2 pagesWhat Is Meant by WBS Element and in What ScenariokvreddyNo ratings yet
- Mary Slessor of Calabar: Pioneer Missionary by Livingstone, W. P.Document231 pagesMary Slessor of Calabar: Pioneer Missionary by Livingstone, W. P.Gutenberg.orgNo ratings yet
- Bounce Now HSW Level 6 PDFDocument28 pagesBounce Now HSW Level 6 PDFdarketo2280% (5)
- 2nd Quarter 2nd Summative Oral CommunicationDocument2 pages2nd Quarter 2nd Summative Oral CommunicationArthur TalomaNo ratings yet
- Ultrasonic CleaningDocument9 pagesUltrasonic Cleaningfgdgrte gdfsgdNo ratings yet
- ISO 17799 Security Audit Example PWC PDFDocument26 pagesISO 17799 Security Audit Example PWC PDFAndré Luis BusnelloNo ratings yet
- Ties Straps SimpsonDocument12 pagesTies Straps SimpsonmurdicksNo ratings yet
- Furuno SC-50 - 110Document30 pagesFuruno SC-50 - 110etchegarayf100% (1)
- Formulation and Testing of Herbal Syrup For Cough and AsthmaDocument11 pagesFormulation and Testing of Herbal Syrup For Cough and Asthmanaomiesolefack03No ratings yet
- Series: Instruction ManualDocument10 pagesSeries: Instruction Manualjbernal89No ratings yet
- Wages For Electrical Chargeman Johor (Rev. 2023)Document4 pagesWages For Electrical Chargeman Johor (Rev. 2023)mohd aizat mohd sayuthiNo ratings yet
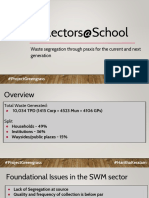
- Collectors@School Waste Segregation ProgramDocument12 pagesCollectors@School Waste Segregation ProgramMir ANo ratings yet
- Sampling and Data CollectionDocument11 pagesSampling and Data CollectionFil Luayon40% (5)
- Correct NLS_LANG Setting in UnixDocument4 pagesCorrect NLS_LANG Setting in UnixluzammNo ratings yet
- Flange Heaters - CX: Application CorrosionDocument12 pagesFlange Heaters - CX: Application CorrosionGustav MolMedNo ratings yet
- Data Teknis Gedung Eksisting 3 - As Build - Pemohon - Jika Tidak Ada Kita Yang BuatDocument29 pagesData Teknis Gedung Eksisting 3 - As Build - Pemohon - Jika Tidak Ada Kita Yang Buatagusta galileoNo ratings yet
- Penilaian Risiko Pada Onshore Pipeline Menggunakan Metode RiskDocument6 pagesPenilaian Risiko Pada Onshore Pipeline Menggunakan Metode RiskAksanul's CreatorNo ratings yet
- SK council discusses urban gardening and clean-up projectsDocument2 pagesSK council discusses urban gardening and clean-up projectsSK PinagsamaNo ratings yet
- Storage Tanks Basic TrainingDocument97 pagesStorage Tanks Basic Traininganouar82100% (8)
- Micropropagation and Microbes DocumentDocument20 pagesMicropropagation and Microbes DocumentRavneet KaurNo ratings yet
- The Economic Impact of Disruptions To Internet Connectivity DeloitteDocument30 pagesThe Economic Impact of Disruptions To Internet Connectivity Deloitteroshan528No ratings yet
- UTI Asset Management Company LTD - Summer Internship Report On Mutual Fund Is The Better Investment PlanDocument110 pagesUTI Asset Management Company LTD - Summer Internship Report On Mutual Fund Is The Better Investment PlanKrishna YadavNo ratings yet
- HDFC Bank loan questionnaire studyDocument2 pagesHDFC Bank loan questionnaire studyParas JainNo ratings yet
- Python Bokeh Cheat Sheet PDFDocument1 pagePython Bokeh Cheat Sheet PDFrakesharumallaNo ratings yet
- Beta12CX Med Vented Cabinet High SPL Mid/High MonitorDocument10 pagesBeta12CX Med Vented Cabinet High SPL Mid/High MonitorMarius GligorNo ratings yet
- Project Requisition Format - Graduation Project - PEOPLE 3Document2 pagesProject Requisition Format - Graduation Project - PEOPLE 3Jashid HameedNo ratings yet