You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Empirical Formulas For Ballistic Re-Entry TrajectoriesDocument6 pagesEmpirical Formulas For Ballistic Re-Entry TrajectoriesMatthew AustinNo ratings yet
- Modeling of Launch Vehicle During The Lift-Off Phase in AtmosphereDocument61 pagesModeling of Launch Vehicle During The Lift-Off Phase in AtmosphereMatthew AustinNo ratings yet
- PETAL Sentence StartersDocument1 pagePETAL Sentence StartersSnip x Hunt manNo ratings yet
- Registration ListDocument5 pagesRegistration ListGnanesh Shetty BharathipuraNo ratings yet
- CHP 1 HypersonicsDocument76 pagesCHP 1 HypersonicsMatthew AustinNo ratings yet
- Conducting Focus GroupsDocument4 pagesConducting Focus GroupsOxfam100% (1)
- Matthew Austin Cover LetterDocument1 pageMatthew Austin Cover LetterMatthew AustinNo ratings yet
- Ian Johnston PHD Thesis Jan 1999 ExportDocument228 pagesIan Johnston PHD Thesis Jan 1999 ExportMatthew AustinNo ratings yet
- Midterm SolDocument7 pagesMidterm SolMatthew AustinNo ratings yet
- Basics of Reentry Vehicle Flight DynamicsDocument65 pagesBasics of Reentry Vehicle Flight DynamicsMatthew AustinNo ratings yet
- HW4 Sol 2018Document2 pagesHW4 Sol 2018Matthew AustinNo ratings yet
- Rana Dissertation 2017Document239 pagesRana Dissertation 2017Matthew Austin100% (1)
- Final Report Robert PanishDocument15 pagesFinal Report Robert PanishMatthew AustinNo ratings yet
- Spaceport Graduate Center Florida Institute of Technology SPC 5011: Human Space Systems Summer Semester 2017 SyllabusDocument11 pagesSpaceport Graduate Center Florida Institute of Technology SPC 5011: Human Space Systems Summer Semester 2017 SyllabusMatthew AustinNo ratings yet
- Fayol'S 14 Principles of ManagementDocument1 pageFayol'S 14 Principles of ManagementMatthew AustinNo ratings yet
- Managing in A Global Environment: Publishing As Prentice HallDocument19 pagesManaging in A Global Environment: Publishing As Prentice HallMatthew AustinNo ratings yet
- 0012 Mergers and Acquisitions Current Scenario andDocument20 pages0012 Mergers and Acquisitions Current Scenario andJuke LastNo ratings yet
- BBL PR Centralizer Rig Crew Handout (R1.1 2-20-19)Document2 pagesBBL PR Centralizer Rig Crew Handout (R1.1 2-20-19)NinaNo ratings yet
- Origin ManualDocument186 pagesOrigin ManualmariaNo ratings yet
- Boundary Value Analysis 2Document13 pagesBoundary Value Analysis 2Raheela NasimNo ratings yet
- Case Study - Suprema CarsDocument5 pagesCase Study - Suprema CarsALFONSO PATRICIO GUERRA CARVAJALNo ratings yet
- Li JinglinDocument3 pagesLi JinglincorneliuskooNo ratings yet
- Contemporary Strategic ManagementDocument2 pagesContemporary Strategic ManagementZee Dee100% (1)
- WWW Studocu Com in N 29646569 Sid 01682568219Document1 pageWWW Studocu Com in N 29646569 Sid 01682568219Nivetha SelvamuruganNo ratings yet
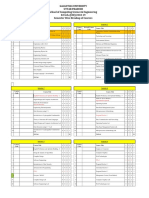
- Galgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesDocument2 pagesGalgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesRohit Singh BhatiNo ratings yet
- Alfa Week 1Document13 pagesAlfa Week 1Cikgu kannaNo ratings yet
- Song Book Inner PagesDocument140 pagesSong Book Inner PagesEliazer PetsonNo ratings yet
- Mathmatcs Joint Form TwoDocument11 pagesMathmatcs Joint Form TwoNurudi jumaNo ratings yet
- SIVACON 8PS - Planning With SIVACON 8PS Planning Manual, 11/2016, A5E01541101-04Document1 pageSIVACON 8PS - Planning With SIVACON 8PS Planning Manual, 11/2016, A5E01541101-04marcospmmNo ratings yet
- Niveshdaily: From Research DeskDocument53 pagesNiveshdaily: From Research DeskADNo ratings yet
- MFE Module 1 .Document15 pagesMFE Module 1 .Adarsh KNo ratings yet
- Engleza Referat-Pantilimonescu IonutDocument13 pagesEngleza Referat-Pantilimonescu IonutAilenei RazvanNo ratings yet
- Enlightened ExperimentationDocument8 pagesEnlightened ExperimentationRaeed HassanNo ratings yet
- Dialectical Relationship Between Translation Theory and PracticeDocument5 pagesDialectical Relationship Between Translation Theory and PracticeEverything Under the sunNo ratings yet
- Chapter 1 - Main Hydrological ConceptsDocument16 pagesChapter 1 - Main Hydrological ConceptsWhy Merah0% (1)
- Carnegie Mellon Thesis RepositoryDocument4 pagesCarnegie Mellon Thesis Repositoryalisonreedphoenix100% (2)
- Lodge at The Ancient City Information Kit / Great ZimbabweDocument37 pagesLodge at The Ancient City Information Kit / Great ZimbabwecitysolutionsNo ratings yet
- 8 A - 1615864446 - 1605148379 - 1579835163 - Topic - 8.A.EffectiveSchoolsDocument9 pages8 A - 1615864446 - 1605148379 - 1579835163 - Topic - 8.A.EffectiveSchoolsYasodhara ArawwawelaNo ratings yet
- 220245-MSBTE-22412-Java (Unit 1)Document40 pages220245-MSBTE-22412-Java (Unit 1)Nomaan ShaikhNo ratings yet
- Pathophysiology of Myocardial Infarction and Acute Management StrategiesDocument11 pagesPathophysiology of Myocardial Infarction and Acute Management StrategiesnwabukingzNo ratings yet
- EMD Question Bank II 2Document4 pagesEMD Question Bank II 2Soham MisalNo ratings yet
- Word CountDocument3 pagesWord CountLeo LonardelliNo ratings yet
- PostScript Quick ReferenceDocument2 pagesPostScript Quick ReferenceSneetsher CrispyNo ratings yet