You might also like
- Demand Response by Aggregates of Domestic Water Heaters With Adaptive Model Predictive ControlDocument5 pagesDemand Response by Aggregates of Domestic Water Heaters With Adaptive Model Predictive ControlJaspreetSinghNo ratings yet
- Srls (Smart Residential Load Simulator)Document8 pagesSrls (Smart Residential Load Simulator)Dulal MannaNo ratings yet
- Energy and Buildings: Heejin Cho, Rogelio Luck, Sandra D. Eksioglu, Louay M. ChamraDocument7 pagesEnergy and Buildings: Heejin Cho, Rogelio Luck, Sandra D. Eksioglu, Louay M. ChamrapantoleNo ratings yet
- Adaptive Prediction Model Accuracy in The Control of Residential Energy ResourcesDocument6 pagesAdaptive Prediction Model Accuracy in The Control of Residential Energy ResourcesMario SammyNo ratings yet
- Applied Energy: A. Vaghefi, M.A. Jafari, Emmanuel Bisse, Y. Lu, J. BrouwerDocument11 pagesApplied Energy: A. Vaghefi, M.A. Jafari, Emmanuel Bisse, Y. Lu, J. Brouwernavas1972No ratings yet
- Documento - A Novel Pump Thermal Electricity Storage - Ptes - System With Thermal Integration - G Frate M Antonelli U Desideri - 2017Document8 pagesDocumento - A Novel Pump Thermal Electricity Storage - Ptes - System With Thermal Integration - G Frate M Antonelli U Desideri - 2017Hugo MNo ratings yet
- Modeling of Internal Combustion Engine Based CogenerationDocument14 pagesModeling of Internal Combustion Engine Based CogenerationALEJANDRO CADENA DAZANo ratings yet
- Analysis of Wind Power Integration Capacity in Wind-Hydro-Thermal Hybrid Power SystemDocument8 pagesAnalysis of Wind Power Integration Capacity in Wind-Hydro-Thermal Hybrid Power SystemTaimur KhanNo ratings yet
- 1 s2.0 S0360544212000989 Main PDFDocument14 pages1 s2.0 S0360544212000989 Main PDFhidrobhNo ratings yet
- Fuzzy Logic Controller For Hybrid Renewable Energy SystemDocument6 pagesFuzzy Logic Controller For Hybrid Renewable Energy SystemAMIT SHARMANo ratings yet
- Renewable Energy: Yang Liu, Heng Zhang, Haiping ChenDocument13 pagesRenewable Energy: Yang Liu, Heng Zhang, Haiping ChenMathiyazhagan SNo ratings yet
- Electrodynamical Modelling of Bidirectional Fuel Cell Systems For HIL Simulations of Combined Grid SystemsDocument6 pagesElectrodynamical Modelling of Bidirectional Fuel Cell Systems For HIL Simulations of Combined Grid SystemsSIMIŞKACINo ratings yet
- Review of Related Literature: 2.1.1 Indoor Light Energy HarvestingDocument14 pagesReview of Related Literature: 2.1.1 Indoor Light Energy HarvestingGillian AmbaNo ratings yet
- Optimal Scheduling of Smart Homes AppliancesDocument4 pagesOptimal Scheduling of Smart Homes Appliancesjorbol827No ratings yet
- 2008 Torres-Hernandez CIEPDocument9 pages2008 Torres-Hernandez CIEPArif Hakam HidayatNo ratings yet
- Heussen Et Al ISGT2010 Public 4Document10 pagesHeussen Et Al ISGT2010 Public 4sebaa haddiNo ratings yet
- Journal of Power Sources: Martin Lenz, Tobias Hoehl, Lukas Zanger, Stefan PischingerDocument12 pagesJournal of Power Sources: Martin Lenz, Tobias Hoehl, Lukas Zanger, Stefan PischingerpolkafNo ratings yet
- DHC Load Management Using Demand Forecast: SciencedirectDocument10 pagesDHC Load Management Using Demand Forecast: Sciencedirectbeauty xuNo ratings yet
- Radd3131 PDFDocument5 pagesRadd3131 PDFperic_vedranNo ratings yet
- Method For Estimating Energy Savings Potential of Chilled-Water Plant Retro-CommissioningDocument13 pagesMethod For Estimating Energy Savings Potential of Chilled-Water Plant Retro-CommissioningjoasobralNo ratings yet
- A Versatile Resonant Tank Identification Methodology For Induction Heating SystemsDocument5 pagesA Versatile Resonant Tank Identification Methodology For Induction Heating SystemsArsalan AtharNo ratings yet
- Virtual power plant management considering energy storageDocument6 pagesVirtual power plant management considering energy storagePierre Narcisse MASSOMA BILLENo ratings yet
- Applied Thermal Engineering: Jackson Braz Marcinichen, Jonathan Albert Olivier, John Richard ThomeDocument16 pagesApplied Thermal Engineering: Jackson Braz Marcinichen, Jonathan Albert Olivier, John Richard Thomeshivakumar bairojuNo ratings yet
- Line-Interactive UPS Using A Fuel Cell As The Primary SourceDocument11 pagesLine-Interactive UPS Using A Fuel Cell As The Primary Sourcefikry 119130009No ratings yet
- Yeh 2012Document8 pagesYeh 2012Luis PerdomoNo ratings yet
- Modelling and Simulation of Concentrating Photovoltaic System With Earth Water Heat Exchanger CoolingDocument8 pagesModelling and Simulation of Concentrating Photovoltaic System With Earth Water Heat Exchanger CoolingElie BaradhyNo ratings yet
- HYBRID ENERGY STORAGE SYSTEMS(HESS)- AN OVERVIEWDocument6 pagesHYBRID ENERGY STORAGE SYSTEMS(HESS)- AN OVERVIEWKumarswamyNo ratings yet
- 2012 - PNNL - An Evaluation of The HVAC Load Potential For Providing Load Balancing ServiceDocument8 pages2012 - PNNL - An Evaluation of The HVAC Load Potential For Providing Load Balancing ServiceBeltus NkwawirNo ratings yet
- Sum JurnalDocument9 pagesSum JurnalAdlina MohamedNo ratings yet
- LAB View Based Smart Washing Machine Analyzer For Energy Consumption FeaturesDocument6 pagesLAB View Based Smart Washing Machine Analyzer For Energy Consumption FeaturesFadly ShafiqNo ratings yet
- VB Commercial Control FinalDocument12 pagesVB Commercial Control Finalfazly rahmanNo ratings yet
- Ac To DC Power Supply 5Document28 pagesAc To DC Power Supply 5gudurusrideviNo ratings yet
- Power ElectronicsDocument27 pagesPower ElectronicsAnand Pon KumarNo ratings yet
- Coordinated Control of Distributed Energy Storage System With Tap Changer Transformers For Voltage Rise Mitigation Under High Photovoltaic PenetrationDocument10 pagesCoordinated Control of Distributed Energy Storage System With Tap Changer Transformers For Voltage Rise Mitigation Under High Photovoltaic PenetrationEvellyne ChrisNo ratings yet
- Energy Management and Operational Planning of A Microgrid With A PV-Based Active Generator For Smart Grid ApplicationsDocument10 pagesEnergy Management and Operational Planning of A Microgrid With A PV-Based Active Generator For Smart Grid ApplicationsAhmed WestministerNo ratings yet
- 1 s2.0 S037877880900084X MainDocument9 pages1 s2.0 S037877880900084X MainPS KingNo ratings yet
- TsoEtal2007 - Predicting Electricity Energy ConsumptionDocument8 pagesTsoEtal2007 - Predicting Electricity Energy ConsumptionĐặng Khánh Hưng LêNo ratings yet
- Energies 09 00592Document21 pagesEnergies 09 00592Ahmed KorichiNo ratings yet
- Model Predictive Control of Central Chiller Plant With Thermal Energy Storage Via Dynamic Programming and Mixed-Integer Linear ProgrammingDocument15 pagesModel Predictive Control of Central Chiller Plant With Thermal Energy Storage Via Dynamic Programming and Mixed-Integer Linear Programmingranjeet_ranjitdonNo ratings yet
- 6b4f PDFDocument12 pages6b4f PDFGanesh RNo ratings yet
- Minimizing Building Electricity Costs with Thermal Storage OptimizationDocument11 pagesMinimizing Building Electricity Costs with Thermal Storage OptimizationRene Daniel Rolon FleitasNo ratings yet
- Smart Heating and Air Conditioning Scheduling Method Incorporating Customer Convenience For Home Energy Management SystemDocument7 pagesSmart Heating and Air Conditioning Scheduling Method Incorporating Customer Convenience For Home Energy Management Systemsulthan_81No ratings yet
- Scientific Paper Title3Document8 pagesScientific Paper Title3mohammedagag18No ratings yet
- Renewable Hybrid SystemDocument6 pagesRenewable Hybrid SystemGhayas Ud-din DarNo ratings yet
- J Apenergy 2013 01 088Document11 pagesJ Apenergy 2013 01 088Faleh FatmaNo ratings yet
- Palma Behnke2013Document11 pagesPalma Behnke2013Itamar Peñaloza MoránNo ratings yet
- Biomechanical Energy Harvesting From Human Motion: Theory, State of The Art, Design Guidelines, and Future DirectionsDocument13 pagesBiomechanical Energy Harvesting From Human Motion: Theory, State of The Art, Design Guidelines, and Future DirectionsOmar MohamedNo ratings yet
- Rule The Joule An Energy Management Design Guide For Self-Powered SensorsDocument10 pagesRule The Joule An Energy Management Design Guide For Self-Powered SensorsstnaooqkqppgyiqewrNo ratings yet
- Electric Energy Storage Technologies ComparedDocument7 pagesElectric Energy Storage Technologies ComparedJohnny TestNo ratings yet
- IEEE Economic DispatchDocument10 pagesIEEE Economic Dispatchتبارك النوريNo ratings yet
- Renewable EnergyDocument9 pagesRenewable EnergyjavierNo ratings yet
- 1 s2.0 S0142061522006597 MainDocument9 pages1 s2.0 S0142061522006597 MainĐức HoàngNo ratings yet
- 2Document21 pages2Anand Pon KumarNo ratings yet
- A Concept For Dual Gaseous and Electric Energy Transmission: P. Favre-Perrod, Student Member, IEEE, and A. BitschiDocument7 pagesA Concept For Dual Gaseous and Electric Energy Transmission: P. Favre-Perrod, Student Member, IEEE, and A. BitschisunitharajababuNo ratings yet
- Evaluating Impacts of Battery Energy Storage System Functionalities On Distribution Systems Using Power Hardware-in-the-Loop SimulationDocument7 pagesEvaluating Impacts of Battery Energy Storage System Functionalities On Distribution Systems Using Power Hardware-in-the-Loop SimulationChaitanya DeshpandeNo ratings yet
- Electrical Power and Energy SystemsDocument12 pagesElectrical Power and Energy SystemsMariam MugheesNo ratings yet
- Yu 2013Document12 pagesYu 2013marvincabalesNo ratings yet
- Applied Thermal Engineering: N. Pardo, Á. Montero, J. Martos, J.F. UrchueguíaDocument5 pagesApplied Thermal Engineering: N. Pardo, Á. Montero, J. Martos, J.F. UrchueguíaMatías Correa AranedaNo ratings yet
- Computationally Efficient Stochastic Model Predictive Controller For Battery Thermal Management of Electric VehicleDocument13 pagesComputationally Efficient Stochastic Model Predictive Controller For Battery Thermal Management of Electric VehicleSriharsha SarmaNo ratings yet
- Tertiary and Secondary Control Levels For Efficiency Optimization and System Damping in Droop Controlled DC-DC ConvertersDocument12 pagesTertiary and Secondary Control Levels For Efficiency Optimization and System Damping in Droop Controlled DC-DC ConvertersRiad TifaNo ratings yet
- An Enhanced Droop Control Method For Accurate Load Sharing and Voltage Improvement of Isolated and Interconnected DC MicrogridsDocument11 pagesAn Enhanced Droop Control Method For Accurate Load Sharing and Voltage Improvement of Isolated and Interconnected DC MicrogridsRiad TifaNo ratings yet
- Homer PaperDocument13 pagesHomer PaperRiad TifaNo ratings yet
- Design of Solar Water Pumping System With FCMA Soft StarterDocument4 pagesDesign of Solar Water Pumping System With FCMA Soft StarterRiad TifaNo ratings yet
- 10 1109@tie 2017 2698425 PDFDocument12 pages10 1109@tie 2017 2698425 PDFRiad TifaNo ratings yet
- WSN 672 2017 126 148 2Document24 pagesWSN 672 2017 126 148 2Amit DostNo ratings yet
- Control Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniDocument16 pagesControl Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniRiad TifaNo ratings yet
- 10 1109@tie 2017 2698425 PDFDocument12 pages10 1109@tie 2017 2698425 PDFRiad TifaNo ratings yet
- 74 Adaptive Decentralized Droop ControllerDocument11 pages74 Adaptive Decentralized Droop ControllerRiad TifaNo ratings yet
- Control Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniDocument16 pagesControl Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniRiad TifaNo ratings yet
- ICREEC'2019: International Conference on Renewable Energy and Energy ConversionDocument2 pagesICREEC'2019: International Conference on Renewable Energy and Energy ConversionRiad TifaNo ratings yet
- 3 Maison PDFDocument6 pages3 Maison PDFRiad TifaNo ratings yet
- Solar PV-Battery Based Hybrid Water Pumping System Using BLDC Motor DriveDocument6 pagesSolar PV-Battery Based Hybrid Water Pumping System Using BLDC Motor DriveRiad TifaNo ratings yet
- Economic Comparison of Solar PV and Diesel Water Pumping SystemDocument6 pagesEconomic Comparison of Solar PV and Diesel Water Pumping SystemRiad TifaNo ratings yet
- 07038525Document6 pages07038525Riad TifaNo ratings yet
- 07418710Document4 pages07418710Riad TifaNo ratings yet
- 07041977Document6 pages07041977Riad TifaNo ratings yet
- Solar PV Array Fed Water Pumping Using BLDC Motor Drive With Boost-Buck ConverterDocument8 pagesSolar PV Array Fed Water Pumping Using BLDC Motor Drive With Boost-Buck ConverterRiad TifaNo ratings yet
- Optoacoplador Integrado 4N25Document7 pagesOptoacoplador Integrado 4N25aureliocsNo ratings yet
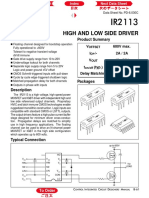
- High and Low Side Driver: Features Product SummaryDocument14 pagesHigh and Low Side Driver: Features Product SummaryMiguel GalvánNo ratings yet
- Supplementary Load Frequency Control by Use of A Number of Both Electric Vehicles and Heat Pump Water HeatersDocument10 pagesSupplementary Load Frequency Control by Use of A Number of Both Electric Vehicles and Heat Pump Water HeatersRiad TifaNo ratings yet
- High and Low Side Driver: Features Product SummaryDocument14 pagesHigh and Low Side Driver: Features Product SummaryMiguel GalvánNo ratings yet
- Air Source Heat Pump A Key Role in The Development of Smart Buildings in Future Energy SystemsDocument6 pagesAir Source Heat Pump A Key Role in The Development of Smart Buildings in Future Energy SystemsRiad TifaNo ratings yet
- IRFP460Document9 pagesIRFP460yusufwpNo ratings yet
- Design and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemDocument8 pagesDesign and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemRiad TifaNo ratings yet
- Performance Analysis of A Directly Coupled Photovoltaic Water-Pumping SystemDocument6 pagesPerformance Analysis of A Directly Coupled Photovoltaic Water-Pumping SystemRiad TifaNo ratings yet
- PDFDocument4 pagesPDFRiad TifaNo ratings yet
- Supplementary Load Frequency Control by Use of A Number of Both Electric Vehicles and Heat Pump Water HeatersDocument10 pagesSupplementary Load Frequency Control by Use of A Number of Both Electric Vehicles and Heat Pump Water HeatersRiad TifaNo ratings yet
- Design and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemDocument8 pagesDesign and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemRiad TifaNo ratings yet
- 6-Ian Baring Gould - BOEM Offshore Wind Plant Electrical Systems CADocument32 pages6-Ian Baring Gould - BOEM Offshore Wind Plant Electrical Systems CADavid MucollariNo ratings yet
- Resume NDocument5 pagesResume NKunal Girish TewaniNo ratings yet
- MSP Report 2022june Final 508 v3Document66 pagesMSP Report 2022june Final 508 v3André LuizNo ratings yet
- Swing Human Powered Generator: For The DC House ProjectDocument4 pagesSwing Human Powered Generator: For The DC House Projectraymond baliteNo ratings yet
- CourseDocument13 pagesCourseJimmyNo ratings yet
- SH5.0 - 6.0 - 8.0 - 10RT User ManualDocument137 pagesSH5.0 - 6.0 - 8.0 - 10RT User ManualGopi Laal BahadurNo ratings yet
- 418000E4422 R0 Write Up On Electro Hydraulic ControllerDocument10 pages418000E4422 R0 Write Up On Electro Hydraulic ControllerkoinsuriNo ratings yet
- .Npadminassetsuploadsannual PublicationsGrid 2076 PDFDocument130 pages.Npadminassetsuploadsannual PublicationsGrid 2076 PDFdocbiswasNo ratings yet
- Afridi CV 2013Document13 pagesAfridi CV 2013seyed mohsen SalehiNo ratings yet
- D4 Frequency and Load SheddingDocument10 pagesD4 Frequency and Load SheddingShailesh ChettyNo ratings yet
- DrtregfDocument376 pagesDrtregfHotib PerwiraNo ratings yet
- Turbine MQP СжатоDocument173 pagesTurbine MQP СжатоАлександр INo ratings yet
- Abb HVDCDocument18 pagesAbb HVDCfiras_atwan100% (1)
- Electrical Power and Energy Systems: Tine L. Vandoorn, Jeroen D.M. de Kooning, Bart Meersman, Brecht ZwaenepoelDocument11 pagesElectrical Power and Energy Systems: Tine L. Vandoorn, Jeroen D.M. de Kooning, Bart Meersman, Brecht ZwaenepoelDulal MannaNo ratings yet
- 4GDH Integrating Smart Thermal Grids Into Future Sustainable Energy SystemsDocument11 pages4GDH Integrating Smart Thermal Grids Into Future Sustainable Energy SystemsDaniel García PérezNo ratings yet
- New Products and Services PoV AccentureDocument84 pagesNew Products and Services PoV AccenturesugadoorNo ratings yet
- Epira LawDocument40 pagesEpira LawBrentNo ratings yet
- XD DTB CatalogueDocument20 pagesXD DTB Cataloguesubidubi99No ratings yet
- Remote Communities in the Nordic Region: A Case Study of Renewable Energy Systems in Nólsoy, Faroe IslandsDocument70 pagesRemote Communities in the Nordic Region: A Case Study of Renewable Energy Systems in Nólsoy, Faroe IslandsTumenjargal MakhbalNo ratings yet
- 4.offshore Wind Plants With VSC-HVDC Connection and Their Impact On The Power System Stability (PDFDrive)Document96 pages4.offshore Wind Plants With VSC-HVDC Connection and Their Impact On The Power System Stability (PDFDrive)le hoai NamNo ratings yet
- Smart Metering ExplainedDocument20 pagesSmart Metering ExplainedNiaz AhmedNo ratings yet
- Electricity Markets (Brown, Schafer)Document65 pagesElectricity Markets (Brown, Schafer)Sebas CorvalánNo ratings yet
- Bulk Supply Interconnection Guideline 2019 PDFDocument36 pagesBulk Supply Interconnection Guideline 2019 PDFXin XiNo ratings yet
- Iegc Grid CodeDocument97 pagesIegc Grid CodelrpatraNo ratings yet
- Distribusi Grid TopologiDocument19 pagesDistribusi Grid Topologienta elektroNo ratings yet
- Nerc Sra 2023Document48 pagesNerc Sra 2023amyjoiNo ratings yet
- E-ISAC SANS Ukraine DUC 5 PDFDocument29 pagesE-ISAC SANS Ukraine DUC 5 PDFartovolastiNo ratings yet
- SechneiderDocument4 pagesSechneiderirfanNo ratings yet
- Problems in power systems related to wind powerDocument24 pagesProblems in power systems related to wind powertstefan88No ratings yet
- InnoCentive - Challenge CenterDocument9 pagesInnoCentive - Challenge CenterLuciano de AlmeidaNo ratings yet