You might also like
- Applied Thermal Engineering: Chuanjin Lan, Jian Xu, Yu Qiao, Yanbao MaDocument9 pagesApplied Thermal Engineering: Chuanjin Lan, Jian Xu, Yu Qiao, Yanbao MaRafael MacedoNo ratings yet
- 1 s2.0 S0196890421011778 MainDocument12 pages1 s2.0 S0196890421011778 Mainganfu2976No ratings yet
- Kim2007 OilmineralDocument8 pagesKim2007 OilmineralFatima Ezzahra LaftouhiNo ratings yet
- Optimized Air Cooling Design for Lithium Ion BatteriesDocument7 pagesOptimized Air Cooling Design for Lithium Ion BatteriesdftghsNo ratings yet
- Applied Thermal Engineering 2Document10 pagesApplied Thermal Engineering 2dima2000No ratings yet
- Numerical Study On The Thermal Performance of A Composite Board inDocument10 pagesNumerical Study On The Thermal Performance of A Composite Board inPedro MuttoniNo ratings yet
- Energies 16 02196Document23 pagesEnergies 16 02196antony johnNo ratings yet
- 1 s2.0 S0017931016337139 MainDocument10 pages1 s2.0 S0017931016337139 MainAnıl TAŞKINNo ratings yet
- Battery Thermal Management System For Electric Vehicle Using Heat Pipes-Smith2018Document13 pagesBattery Thermal Management System For Electric Vehicle Using Heat Pipes-Smith2018Stacy WilsonNo ratings yet
- IET Energy Syst Integration - 2022 - Bastida - Dynamic Modelling of Ice Based Thermal Energy Storage For CoolingDocument18 pagesIET Energy Syst Integration - 2022 - Bastida - Dynamic Modelling of Ice Based Thermal Energy Storage For CoolingPatel Amit R.No ratings yet
- Research Article: Optimizing The Heat Dissipation of An Electric Vehicle Battery PackDocument25 pagesResearch Article: Optimizing The Heat Dissipation of An Electric Vehicle Battery PackMohan PadiyarNo ratings yet
- J2022 JES TES Optimization James Et AlDocument14 pagesJ2022 JES TES Optimization James Et AlabhijeetNo ratings yet
- 10.1016 J.applthermaleng.2022.118417 6pjaDocument11 pages10.1016 J.applthermaleng.2022.118417 6pjaAlirezaNo ratings yet
- Energy Conversion and Management: R.W. Van Gils, D. Danilov, P.H.L. Notten, M.F.M. Speetjens, H. NijmeijerDocument9 pagesEnergy Conversion and Management: R.W. Van Gils, D. Danilov, P.H.L. Notten, M.F.M. Speetjens, H. NijmeijerAbid HussainNo ratings yet
- Articulo Heidy BateriaDocument12 pagesArticulo Heidy Bateriaheidy paola del castillo carrilloNo ratings yet
- Applied Thermal Engineering: Joaquim M. Gonçalves, Cláudio Melo, Christian J.L. HermesDocument9 pagesApplied Thermal Engineering: Joaquim M. Gonçalves, Cláudio Melo, Christian J.L. HermesMonowarul IslamNo ratings yet
- Design and Performance Evaluation of Liquid-Cooled Heat Dissipation Structure For Lithium Battery ModuleDocument18 pagesDesign and Performance Evaluation of Liquid-Cooled Heat Dissipation Structure For Lithium Battery Module赵一霏No ratings yet
- Cheralathan Et Al-2007-International Journal of Energy ResearchDocument16 pagesCheralathan Et Al-2007-International Journal of Energy ResearchFranciscoNo ratings yet
- Journal of Energy Storage: Mohammed N. Ajour, Ahmad H. Milyani, Nidal H. Abu-Hamdeh, Arash KarimipourDocument17 pagesJournal of Energy Storage: Mohammed N. Ajour, Ahmad H. Milyani, Nidal H. Abu-Hamdeh, Arash KarimipourKK HPRNo ratings yet
- 1 s2.0 S2352152X22001499 Main - &&Document12 pages1 s2.0 S2352152X22001499 Main - &&tahreem hussainNo ratings yet
- 1 s2.0 S0196890419311823 MainDocument13 pages1 s2.0 S0196890419311823 Mainzhaocr2018No ratings yet
- Refrigerant Based Cooling BatteriesDocument12 pagesRefrigerant Based Cooling Batteriesrosca raulNo ratings yet
- FluidsDocument21 pagesFluidsSikander Ahmed JahangirNo ratings yet
- Energies: Direct Comparison of Immersion and Cold-Plate Based Cooling For Automotive Li-Ion Battery ModulesDocument19 pagesEnergies: Direct Comparison of Immersion and Cold-Plate Based Cooling For Automotive Li-Ion Battery ModulesNour Aldeen YassenNo ratings yet
- Battery Cooling SystemDocument26 pagesBattery Cooling Systemmagnus 801No ratings yet
- Investigation of The Effectiveness of Thermoelectric Cooler With Stirling Engine Heat Pump For The Cooling of Lithium-Ion Battery ModuleDocument7 pagesInvestigation of The Effectiveness of Thermoelectric Cooler With Stirling Engine Heat Pump For The Cooling of Lithium-Ion Battery ModuleJoshua Roberto GrutaNo ratings yet
- Structural Optimization of Lithium-Ion Battery For Improving Thermal Performance Based On A Liquid Cooling SystemDocument9 pagesStructural Optimization of Lithium-Ion Battery For Improving Thermal Performance Based On A Liquid Cooling SystemSrikanthNo ratings yet
- Prismatic Comprehensive Cell AnalysisDocument16 pagesPrismatic Comprehensive Cell AnalysisHemrajNo ratings yet
- Bahiraei 2016Document9 pagesBahiraei 2016yourspajjuNo ratings yet
- OPR Report (Edited)Document12 pagesOPR Report (Edited)kumarisakhi471No ratings yet
- Batteries: Thermal Analysis of Cold Plate With Di Configurations For Thermal Management of A Lithium-Ion BatteryDocument11 pagesBatteries: Thermal Analysis of Cold Plate With Di Configurations For Thermal Management of A Lithium-Ion BatteryHarshaNo ratings yet
- Design and Experimentali Nvestigation o Fa Novel Thermoelectric Water Dispenser UnitDocument14 pagesDesign and Experimentali Nvestigation o Fa Novel Thermoelectric Water Dispenser UnitJohn Fredy Muñoz BuitragoNo ratings yet
- 22-06!28!3 Thermal Analysis and Management of PEM Fuel CellDocument11 pages22-06!28!3 Thermal Analysis and Management of PEM Fuel CellEduardus Galih PutrantoNo ratings yet
- (Asce) Ey 1943-7897 0000648Document10 pages(Asce) Ey 1943-7897 0000648rajkumar.kNo ratings yet
- Chiller Plant Operation Optimization: Energy-Efficient Primary-Only and Primary-Secondary SystemsDocument15 pagesChiller Plant Operation Optimization: Energy-Efficient Primary-Only and Primary-Secondary Systems1305619200ljwNo ratings yet
- Applied Thermal Engineering: Sepehr Mousavi, Majid Siavashi, Amirhosein ZadehkabirDocument14 pagesApplied Thermal Engineering: Sepehr Mousavi, Majid Siavashi, Amirhosein ZadehkabirGouri G KrishnanNo ratings yet
- 1 s2.0 S037877531730959X MainDocument13 pages1 s2.0 S037877531730959X MainGabriel AraujoNo ratings yet
- Thermal Management of Li-Ion Batteries With Single-Phase Liquid Immersion CoolingDocument11 pagesThermal Management of Li-Ion Batteries With Single-Phase Liquid Immersion Cooling1SI20EE028 Rakshith H SNo ratings yet
- Numerical Model of A Thermoelectric GeneDocument9 pagesNumerical Model of A Thermoelectric GeneMes BenNo ratings yet
- Thermo-Economic Optimization of An Ice Thermal Energy Storage System For Air-Conditioning ApplicationsDocument10 pagesThermo-Economic Optimization of An Ice Thermal Energy Storage System For Air-Conditioning Applicationshassan aliNo ratings yet
- Applied SciencesDocument22 pagesApplied SciencesSoms DesignNo ratings yet
- ValuesDocument20 pagesValuesBS GOURISARANNo ratings yet
- 2 Energies-14-04187Document19 pages2 Energies-14-04187shubhamNo ratings yet
- FGFGHDocument11 pagesFGFGHLiviu BadeaNo ratings yet
- Thermal Management of Lithiumion Batteries For Electric VehiclesDocument12 pagesThermal Management of Lithiumion Batteries For Electric Vehiclestoldo sanalNo ratings yet
- 1456064976_313SDocument8 pages1456064976_313SSam SamNo ratings yet
- 1-s2.0-S2352152X24001750-mainDocument17 pages1-s2.0-S2352152X24001750-mainfabio1199No ratings yet
- 1 s2.0 S2214157X1830128X Main PDFDocument13 pages1 s2.0 S2214157X1830128X Main PDFDonny SetyaNo ratings yet
- Energy Reports: Y. Lyu, A.R.M. Siddique, S.H. Majid, M. Biglarbegian, S.A. Gadsden, S. MahmudDocument6 pagesEnergy Reports: Y. Lyu, A.R.M. Siddique, S.H. Majid, M. Biglarbegian, S.A. Gadsden, S. MahmudVishal ThakurNo ratings yet
- Computational Simulation of The Heat and Fluid Flow Through A Rotary Thermal Regenerator Based On A Porous Media ApproachDocument6 pagesComputational Simulation of The Heat and Fluid Flow Through A Rotary Thermal Regenerator Based On A Porous Media Approachahmedn.alhusseiniNo ratings yet
- Cooling Methods ComparisonDocument9 pagesCooling Methods Comparisonvinay shimpiNo ratings yet
- Experimental Investigation On A Thermoelectric Cooler ForDocument11 pagesExperimental Investigation On A Thermoelectric Cooler ForJoshua Roberto GrutaNo ratings yet
- International Journal of Heat and Mass Transfer: Robert Nacke, Brittany Northcutt, Issam MudawarDocument12 pagesInternational Journal of Heat and Mass Transfer: Robert Nacke, Brittany Northcutt, Issam MudawarCiro Pascarella PrimoNo ratings yet
- Energies 12 01926 PDFDocument17 pagesEnergies 12 01926 PDFlahohiNo ratings yet
- Zonal Thermal Model of Distribution Transformer Cooling EnriqueDocument12 pagesZonal Thermal Model of Distribution Transformer Cooling EnriqueDIEGO ALAN MIRANDA ESCAMILLANo ratings yet
- FoundationDocument6 pagesFoundationOerip DjajasentosaNo ratings yet
- A Computational Multi-Node Electro-Thermal Model For Large Prismatic Lithium-Ion Batteries - Accepted VersionDocument24 pagesA Computational Multi-Node Electro-Thermal Model For Large Prismatic Lithium-Ion Batteries - Accepted VersionmavericksailorNo ratings yet
- Optimization andCFD Analysis of A ShellDocument16 pagesOptimization andCFD Analysis of A ShellErmias AbelnehNo ratings yet
- Thermoelectric Cooling - WikipediaDocument38 pagesThermoelectric Cooling - WikipediaVenkat AlluNo ratings yet
- Effects of Varying Oblique Angles On Flow Boiling H - 2016 - International Journ PDFDocument15 pagesEffects of Varying Oblique Angles On Flow Boiling H - 2016 - International Journ PDFAbdul AzizNo ratings yet
- Fluid flow and heat transfer investigations on enhanced microchannel heat sink using oblique finsDocument12 pagesFluid flow and heat transfer investigations on enhanced microchannel heat sink using oblique finsAbdul AzizNo ratings yet
- Hot Spot Mitigating With Oblique Finned Microchannel Heat SinkDocument8 pagesHot Spot Mitigating With Oblique Finned Microchannel Heat SinkAbdul AzizNo ratings yet
- MEHB503 04 RE Support and Overcoming BarriersDocument38 pagesMEHB503 04 RE Support and Overcoming BarriersAbdul AzizNo ratings yet
- Chapter 1Document39 pagesChapter 1Firdaus JulaihiNo ratings yet
- Peninsular Malaysia Electricity Supply Industry Outlook 2014Document73 pagesPeninsular Malaysia Electricity Supply Industry Outlook 2014adzli maherNo ratings yet
- Pole climbing robot connects distribution lines safelyDocument46 pagesPole climbing robot connects distribution lines safelyAbdul AzizNo ratings yet
- Experimental Investigation On The Dynamic Performance of A Hybri - 2011 - Applie PDFDocument9 pagesExperimental Investigation On The Dynamic Performance of A Hybri - 2011 - Applie PDFAbdul AzizNo ratings yet
- PDFDocument19 pagesPDFjfhmjmhfcnjcnNo ratings yet
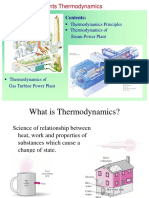
- Ch1-1 Power Plants - ThermodynamicsDocument32 pagesCh1-1 Power Plants - ThermodynamicsAbdul Aziz100% (1)
- Design of a mini radiant cooling systemDocument2 pagesDesign of a mini radiant cooling systemAbdul AzizNo ratings yet
- College of Engineering IT Presentation 20162017Document44 pagesCollege of Engineering IT Presentation 20162017Abdul AzizNo ratings yet
- Power Generation Sources in Malaysia Sta PDFDocument18 pagesPower Generation Sources in Malaysia Sta PDFAbdul AzizNo ratings yet
- Linear DC Machine PDFDocument21 pagesLinear DC Machine PDFAbdul Aziz0% (1)
- Energy Commission Annual Report 2010 (ENG)Document143 pagesEnergy Commission Annual Report 2010 (ENG)Abdul AzizNo ratings yet
- Lab 3 MeasurementDocument21 pagesLab 3 MeasurementAbdul AzizNo ratings yet
- Tutorial Questions On Thermo 1Document1 pageTutorial Questions On Thermo 1MuhammadAizatNo ratings yet
- Chap 8 Second Order Natural Response Examples PDFDocument13 pagesChap 8 Second Order Natural Response Examples PDFAbdul AzizNo ratings yet
- Machine Design and CAD Lab ManualDocument45 pagesMachine Design and CAD Lab ManualPraviin Jayakumar100% (3)
- Arduino ManualDocument40 pagesArduino ManualDaniela Cardenas LuboNo ratings yet
- Arduino ManualDocument40 pagesArduino ManualDaniela Cardenas LuboNo ratings yet
- Tutorial Questions On Thermo 1Document1 pageTutorial Questions On Thermo 1MuhammadAizatNo ratings yet
- Introduction and Basic ConceptsDocument45 pagesIntroduction and Basic ConceptsSorna KailashNo ratings yet
- Arduino ManualDocument40 pagesArduino ManualDaniela Cardenas LuboNo ratings yet
- Answer s1n2 s1314Document2 pagesAnswer s1n2 s1314Abdul AzizNo ratings yet
- Chapter 6 Open MethodsDocument58 pagesChapter 6 Open MethodsAbdul AzizNo ratings yet
- Introduction and Basic ConceptsDocument45 pagesIntroduction and Basic ConceptsSorna KailashNo ratings yet
- Introduction and Basic ConceptsDocument45 pagesIntroduction and Basic ConceptsSorna KailashNo ratings yet
- Engineering Mechanics: Statics in SI Units, 12e: Equilibrium of A Rigid BodyDocument35 pagesEngineering Mechanics: Statics in SI Units, 12e: Equilibrium of A Rigid BodyAbdul AzizNo ratings yet
- Business Ethics and Social ResponsibilityDocument16 pagesBusiness Ethics and Social Responsibilitytitan abcdNo ratings yet
- BiotinDocument10 pagesBiotinMohamed Aslam ANo ratings yet
- William Gilpin On Picturesque TravelDocument7 pagesWilliam Gilpin On Picturesque Travelcordia ghoshNo ratings yet
- Reading - Zeeshan UsmaniDocument25 pagesReading - Zeeshan UsmaniHanif AbbasNo ratings yet
- Nipas Act, Ipra, LGC - Atty. Mayo-AndaDocument131 pagesNipas Act, Ipra, LGC - Atty. Mayo-AndaKing Bangngay100% (1)
- Silver Bells Convent School Annual Examination 2021-22: Duration:2hours Subject: Science M. M.: 40 Class: IXDocument2 pagesSilver Bells Convent School Annual Examination 2021-22: Duration:2hours Subject: Science M. M.: 40 Class: IXAnkit SharmaNo ratings yet
- Behold The Lamb of GodDocument225 pagesBehold The Lamb of GodLinda Moss GormanNo ratings yet
- International Journal of Organizational Innovation Final Issue Vol 5 Num 4 April 2013Document233 pagesInternational Journal of Organizational Innovation Final Issue Vol 5 Num 4 April 2013Vinit DawaneNo ratings yet
- Why the Seventh Day, Not the First, Should Be Observed as the SabbathDocument8 pagesWhy the Seventh Day, Not the First, Should Be Observed as the SabbathMarcos Silva100% (1)
- Name CompilationDocument490 pagesName CompilationMark Taylor100% (1)
- Centre of Mass ProblemsDocument10 pagesCentre of Mass ProblemsazsaNo ratings yet
- Classroom Management StrategiesDocument19 pagesClassroom Management Strategiesalmors0% (1)
- Interventional Radiology & AngiographyDocument45 pagesInterventional Radiology & AngiographyRyBone95No ratings yet
- GUIDE FOR ROOM EXAMINER - 2023-05 Revised (CSE-Pen & Paper Test) - ModifiedDocument14 pagesGUIDE FOR ROOM EXAMINER - 2023-05 Revised (CSE-Pen & Paper Test) - ModifiedLeilani BacayNo ratings yet
- Significance of Six SigmaDocument2 pagesSignificance of Six SigmaShankar RajkumarNo ratings yet
- Graphical Machining Process SimulatorDocument37 pagesGraphical Machining Process SimulatorFrodoNo ratings yet
- TPS6 LecturePowerPoint 11.1 DT 043018Document62 pagesTPS6 LecturePowerPoint 11.1 DT 043018Isabelle TorresNo ratings yet
- Past Progressive WorksheetDocument3 pagesPast Progressive WorksheetSantiago VargasNo ratings yet
- Parameter ranges and attenuation values for RRH configurationsDocument121 pagesParameter ranges and attenuation values for RRH configurationscharantejaNo ratings yet
- Test Booklet Primary-1 PDFDocument53 pagesTest Booklet Primary-1 PDFReynold Morales Libato100% (1)
- Engrase SKF PDFDocument52 pagesEngrase SKF PDFTecnico AnzizarNo ratings yet
- Lineshaft Turbine Pump 1800 RPM 60 HZDocument156 pagesLineshaft Turbine Pump 1800 RPM 60 HZFayez Al-ahmadiNo ratings yet
- Data & InformationDocument48 pagesData & InformationDave DearingNo ratings yet
- Metamorphic differentiation explainedDocument2 pagesMetamorphic differentiation explainedDanis Khan100% (1)
- MSS Command ReferenceDocument7 pagesMSS Command Referencepaola tixeNo ratings yet
- Enclosure No. 6.7: Parental ConsentDocument3 pagesEnclosure No. 6.7: Parental ConsentRhea CarinoNo ratings yet
- Shariese-Moore-Resume NonumberDocument1 pageShariese-Moore-Resume Nonumberapi-404271214No ratings yet
- Detect3D Fire and Gas Mapping Report SAMPLEDocument29 pagesDetect3D Fire and Gas Mapping Report SAMPLEAnurag BholeNo ratings yet
- Study Guide For Kawabata's "Of Birds and Beasts"Document3 pagesStudy Guide For Kawabata's "Of Birds and Beasts"BeholdmyswarthyfaceNo ratings yet
- Globalisation Shobhit NirwanDocument12 pagesGlobalisation Shobhit NirwankrshraichandNo ratings yet