You might also like
- I. Translate The Following FragmentsDocument3 pagesI. Translate The Following Fragmentsbelsim7No ratings yet
- Claytronics: Scalable Matter Programmable Code C Atoms Synthetic Principle Design 3d Movement of MatterDocument3 pagesClaytronics: Scalable Matter Programmable Code C Atoms Synthetic Principle Design 3d Movement of MatterAjay KumarNo ratings yet
- The Open Mechanical Engineering JournalDocument8 pagesThe Open Mechanical Engineering JournalSrinivas ReddyNo ratings yet
- A Rtificial Intelligence and Robotics: Contributi ScientificiDocument7 pagesA Rtificial Intelligence and Robotics: Contributi Scientificibiswa217No ratings yet
- Singularities of Robot MechanismsDocument201 pagesSingularities of Robot MechanismsAnonymous BW9mIv22N100% (1)
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFrom EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNo ratings yet
- Soft Robots Modeling A Structured OverviewDocument21 pagesSoft Robots Modeling A Structured Overview维尔No ratings yet
- AMR 2010/2011: Final Projects: 0. General InformationDocument4 pagesAMR 2010/2011: Final Projects: 0. General InformationIvan AvramovNo ratings yet
- Quantum Computing for Programmers and Investors: with full implementation of algorithms in CFrom EverandQuantum Computing for Programmers and Investors: with full implementation of algorithms in CRating: 5 out of 5 stars5/5 (1)
- Robotic Forklifts For Intelligent Warehouses: Routing, Path Planning, and Auto-LocalizationDocument7 pagesRobotic Forklifts For Intelligent Warehouses: Routing, Path Planning, and Auto-LocalizationKhoa Nguyễn AnhNo ratings yet
- Design and Kinematic Modeling of Constant Curvature Continuum Robots A ReviewDocument57 pagesDesign and Kinematic Modeling of Constant Curvature Continuum Robots A ReviewAkshyaNo ratings yet
- Applications and Safety Issues in An EmergencyDocument48 pagesApplications and Safety Issues in An Emergencyuditsingh665No ratings yet
- Past 50 Yers of RoboticsDocument6 pagesPast 50 Yers of RoboticsIvan AvramovNo ratings yet
- Root PDFDocument17 pagesRoot PDFralfvandoormaalNo ratings yet
- Rajeev Gandhi Memorial College of Engineering &technology (Autonomous)Document27 pagesRajeev Gandhi Memorial College of Engineering &technology (Autonomous)Shaikshavali ShaikNo ratings yet
- Research Paper On Space RoboticsDocument4 pagesResearch Paper On Space Roboticssmltlfrif100% (1)
- 3D Simulation of N Particles Randomly DispersedDocument5 pages3D Simulation of N Particles Randomly DispersedJose C. Garcia RNo ratings yet
- Abstract. Nowadays Space Robotics As A Science and Technology BecomesDocument5 pagesAbstract. Nowadays Space Robotics As A Science and Technology BecomesRahul SunnyNo ratings yet
- Swarmbot HardwaresssDocument40 pagesSwarmbot HardwaresssFaiza FatimaNo ratings yet
- Proceedings of Spie: The Analysis of Projective Transformation Algorithms For Image Recognition On Mobile DevicesDocument9 pagesProceedings of Spie: The Analysis of Projective Transformation Algorithms For Image Recognition On Mobile DevicesMdSalahUddinYusufNo ratings yet
- Swarm Robotics Design and ImplementationDocument9 pagesSwarm Robotics Design and ImplementationMUHAMMAD AMMARNo ratings yet
- The Future of Humanoid Robots - Research and ApplicationsDocument310 pagesThe Future of Humanoid Robots - Research and ApplicationsJosé RamírezNo ratings yet
- AStar 1Document11 pagesAStar 1truhtNo ratings yet
- Robotic Path Planning and Fuzzy Neural NDocument6 pagesRobotic Path Planning and Fuzzy Neural Nfaith_khp73301No ratings yet
- Using Artificial Neural Networks for Analog Integrated Circuit Design AutomationFrom EverandUsing Artificial Neural Networks for Analog Integrated Circuit Design AutomationNo ratings yet
- Tese Carlos Eduardo Elmadjian RevisadaDocument152 pagesTese Carlos Eduardo Elmadjian RevisadaFelipe LageNo ratings yet
- Review of Related Literature CathDocument10 pagesReview of Related Literature CathCathlyn AbionNo ratings yet
- Introduction to Quantum Computing & Machine Learning Technologies: 1, #1From EverandIntroduction to Quantum Computing & Machine Learning Technologies: 1, #1No ratings yet
- ClaytronicsDocument43 pagesClaytronicsBharathJagadeeshNo ratings yet
- Encoder Con Mouse OpticoDocument9 pagesEncoder Con Mouse OpticoJorge Hernán Osorio SánchezNo ratings yet
- Parallel Processing for Artificial Intelligence 1From EverandParallel Processing for Artificial Intelligence 1Rating: 5 out of 5 stars5/5 (1)
- Sensors 22 04022Document27 pagesSensors 22 04022Nikhil AhirwarNo ratings yet
- Claytronic SeminarDocument25 pagesClaytronic SeminarsexncityNo ratings yet
- Sensors 20 05409Document19 pagesSensors 20 05409mezianeNo ratings yet
- Research Paper On Pick and Place RobotDocument7 pagesResearch Paper On Pick and Place Robotgvzwyd4n100% (1)
- Robot Manipulators - 9789537619060 PDFDocument556 pagesRobot Manipulators - 9789537619060 PDF楊宗棠No ratings yet
- Experiences in Deploying Test Arenas For Autonomous Mobile RobotsDocument8 pagesExperiences in Deploying Test Arenas For Autonomous Mobile RobotsCarlos RamirezNo ratings yet
- A Reconfiguration Method For Muti-Robot Monitoring Patrols: Cybernetics and SystemsDocument27 pagesA Reconfiguration Method For Muti-Robot Monitoring Patrols: Cybernetics and SystemsPablo Sari CedilloNo ratings yet
- Kouretes 2010 SPL Team Description PaperDocument8 pagesKouretes 2010 SPL Team Description PaperUmer HuzaifaNo ratings yet
- Bachelor Thesis Informatik PDFDocument8 pagesBachelor Thesis Informatik PDFCynthia King100% (2)
- Path Planning For An Industrial Robotic ArmDocument7 pagesPath Planning For An Industrial Robotic ArmZahid IqbalNo ratings yet
- Objective & Outcome of RoboticsDocument3 pagesObjective & Outcome of RoboticsMechanicalNo ratings yet
- A 3D Fax Machine Based On ClaytronicsDocument8 pagesA 3D Fax Machine Based On ClaytronicsSiya VermaNo ratings yet
- 30 Inverse PDFDocument8 pages30 Inverse PDFIJAERS JOURNALNo ratings yet
- 2005 Path Planning Protocol For Collaborative Multi-Robot SystemsDocument6 pages2005 Path Planning Protocol For Collaborative Multi-Robot SystemsEx6TenZNo ratings yet
- WebCamAppl WisarnDocument15 pagesWebCamAppl WisarnRafael Sánchez VillaltaNo ratings yet
- Collaboration RobotsDocument19 pagesCollaboration RobotsMohaman GonzaNo ratings yet
- Graph Theoretic Methods in Multiagent NetworksFrom EverandGraph Theoretic Methods in Multiagent NetworksRating: 5 out of 5 stars5/5 (1)
- Esearch Tatement Pratik Chaudhari: Pratikac@ucla - Edu Pratikac - InfoDocument4 pagesEsearch Tatement Pratik Chaudhari: Pratikac@ucla - Edu Pratikac - InfoNguyễn Xuân KhảiNo ratings yet
- Novel Mobile Robot Path Planning Algorithm: Hachour OuardaDocument10 pagesNovel Mobile Robot Path Planning Algorithm: Hachour Ouarday.yusofNo ratings yet
- Modeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Document8 pagesModeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Georgiana BunghiuzNo ratings yet
- Sensors: Path Planning For Autonomous Mobile Robots: A ReviewDocument29 pagesSensors: Path Planning For Autonomous Mobile Robots: A Review21P410 - VARUN MNo ratings yet
- Self-Organizing Map and Cellular Automata CombinedDocument8 pagesSelf-Organizing Map and Cellular Automata CombinedMarco Antonio Reséndiz DíazNo ratings yet
- Motion Planning For Multiple Mobile Robot Systems Using Dynamic NetworksDocument6 pagesMotion Planning For Multiple Mobile Robot Systems Using Dynamic Networkseocv20No ratings yet
- Robot Control ThesisDocument5 pagesRobot Control Thesisafloaaffbkmmbx100% (1)
- NL 150400Document4 pagesNL 150400JafarNo ratings yet
- Kelvion Plate Heat Exchanger: Thermal Data For: NT100X CDL-10Document2 pagesKelvion Plate Heat Exchanger: Thermal Data For: NT100X CDL-10JafarNo ratings yet
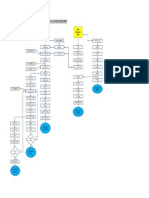
- Process Flow Diagram: Raw Material RiceDocument1 pageProcess Flow Diagram: Raw Material RiceJafarNo ratings yet
- Phe Spec For HR 81 91Document2 pagesPhe Spec For HR 81 91JafarNo ratings yet
- Waste Heat RecoveryDocument12 pagesWaste Heat RecoveryJafarNo ratings yet
- Heat ExchangerDocument7 pagesHeat ExchangerJafarNo ratings yet
- Applied Thermal Engineering: Jian Song, Chun-Wei Gu, Xue-Song LiDocument9 pagesApplied Thermal Engineering: Jian Song, Chun-Wei Gu, Xue-Song LiJafarNo ratings yet
- Business CommunicationsDocument13 pagesBusiness CommunicationsJafarNo ratings yet
- Additive Manufacturing: Frederick Lia, Joshua Park, Jay Tressler, Richard MartukanitzDocument9 pagesAdditive Manufacturing: Frederick Lia, Joshua Park, Jay Tressler, Richard MartukanitzJafarNo ratings yet
- Experimental Study On The Radiant Cooling Load of Floor Based On The Radiant Time Series MethodDocument7 pagesExperimental Study On The Radiant Cooling Load of Floor Based On The Radiant Time Series MethodJafarNo ratings yet
- Research PaperDocument7 pagesResearch PaperJafarNo ratings yet
- IoT Workshop ManualDocument36 pagesIoT Workshop ManualJafarNo ratings yet
- Braided Composites ModellingDocument33 pagesBraided Composites ModellingaamirmubNo ratings yet
- Financial Analysis of OGDCLDocument16 pagesFinancial Analysis of OGDCLsehrish_sadaqat7873100% (1)
- Sinamics gm150 sm150 Catalog d12 02 2020 enDocument238 pagesSinamics gm150 sm150 Catalog d12 02 2020 enGo andWatchNo ratings yet
- David-Huynh Indeed ResumeDocument3 pagesDavid-Huynh Indeed Resumeapi-546353822No ratings yet
- LOVDocument43 pagesLOVMei FadillahNo ratings yet
- Latitude 5424 Rugged Spec SheetDocument5 pagesLatitude 5424 Rugged Spec SheetHaitemNo ratings yet
- Title To The ProjectDocument14 pagesTitle To The ProjectJatinChadhaNo ratings yet
- Project of Consumer BehaviourDocument28 pagesProject of Consumer BehaviourNaveed JuttNo ratings yet
- D.E.I Technical College, Dayalbagh Agra 5 III Semester Electrical Engg. Electrical Circuits and Measurements Question Bank Unit 1Document5 pagesD.E.I Technical College, Dayalbagh Agra 5 III Semester Electrical Engg. Electrical Circuits and Measurements Question Bank Unit 1Pritam Kumar Singh100% (1)
- Unilever Financial PerformanceDocument9 pagesUnilever Financial PerformanceAbdul QayumNo ratings yet
- Vehicle Detection and Identification Using YOLO in Image ProcessingDocument6 pagesVehicle Detection and Identification Using YOLO in Image ProcessingIJRASETPublicationsNo ratings yet
- Burndown Sample ClayDocument64 pagesBurndown Sample ClaybluemaxNo ratings yet
- Aermod - DRM - Course NotesDocument25 pagesAermod - DRM - Course NotesGhulamMustafaNo ratings yet
- SPD eRAN7.0 CSPC Feature Introduction-20140228-A-1.0Document25 pagesSPD eRAN7.0 CSPC Feature Introduction-20140228-A-1.0contact2vikasNo ratings yet
- Nfjpia Mockboard 2011 BLTDocument12 pagesNfjpia Mockboard 2011 BLTVon Wilson AjocNo ratings yet
- Deploying MVC5 Based Provider Hosted Apps For On-Premise SharePoint 2013Document22 pagesDeploying MVC5 Based Provider Hosted Apps For On-Premise SharePoint 2013cilango1No ratings yet
- BW-Africa 2023 BrochureDocument12 pagesBW-Africa 2023 BrochureDanial DarimiNo ratings yet
- Splunk Certification: Certification Exam Study GuideDocument18 pagesSplunk Certification: Certification Exam Study GuidesalemselvaNo ratings yet
- UN-HABITAT Quick Quide Urban Mobility Plans For Review - Fri 01-Feb-2013Document59 pagesUN-HABITAT Quick Quide Urban Mobility Plans For Review - Fri 01-Feb-2013tarekyousryNo ratings yet
- 1 Introduction To Pharmaceutical Dosage Forms Part1Document32 pages1 Introduction To Pharmaceutical Dosage Forms Part1Joanna Carla Marmonejo Estorninos-Walker100% (1)
- Tarlac - San Antonio - Business Permit - NewDocument2 pagesTarlac - San Antonio - Business Permit - Newarjhay llave100% (1)
- Timken Bearing Damage PosterDocument1 pageTimken Bearing Damage Postera04205100% (5)
- Psad - 2Document25 pagesPsad - 2Mary Ann Toni N. RasonabeNo ratings yet
- Shell Omala s2 GX 320 TdsDocument2 pagesShell Omala s2 GX 320 TdsOnie Hammamz OylNo ratings yet
- Modeling Cover Letter No ExperienceDocument7 pagesModeling Cover Letter No Experienceimpalayhf100% (1)
- Spectrochem Chemindex 2016 17Document122 pagesSpectrochem Chemindex 2016 17Nivedita Dube0% (1)
- Fine Fragrances After Shave, Eau de Parfum, Eau de Cologne, Eau de Toilette, Parfume Products (9-08)Document6 pagesFine Fragrances After Shave, Eau de Parfum, Eau de Cologne, Eau de Toilette, Parfume Products (9-08)Mustafa BanafaNo ratings yet
- Exchange Rates JBDocument9 pagesExchange Rates JBboss9921No ratings yet
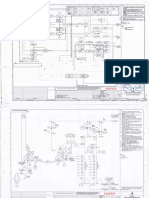
- Attachment 05 - BFD, ELD and P&I Diagrams-PearlDocument77 pagesAttachment 05 - BFD, ELD and P&I Diagrams-Pearlum er100% (1)
- Preventive Maintenance Checklist: Tool Room & Production SawsDocument2 pagesPreventive Maintenance Checklist: Tool Room & Production SawsValerio Ambrocio IsmaelNo ratings yet