You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- SoR 2020-21 Final PDFDocument667 pagesSoR 2020-21 Final PDFRaviraju Uddarraju100% (2)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Atlas Africa Energy ResourcesDocument342 pagesAtlas Africa Energy ResourcesGajendra SinghNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- 2019 Electricity Supply Plan GhanaDocument87 pages2019 Electricity Supply Plan GhanaGajendra SinghNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- EHV Catalogue PDFDocument29 pagesEHV Catalogue PDFvineets058No ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Unit Cost of Survey by CTAG On 21-Nov-2011Document7 pagesUnit Cost of Survey by CTAG On 21-Nov-2011Gajendra SinghNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Raychem: Ajit Power Solutions Private LimitedDocument1 pageRaychem: Ajit Power Solutions Private LimitedGajendra SinghNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Drafting Transmission Plan and Profile Drawings Directly From PLS-CADDDocument41 pagesDrafting Transmission Plan and Profile Drawings Directly From PLS-CADDGajendra SinghNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Table 5-3 - (Standards Table 146-F) Area Category Method - Lighting Power Density Values (Watts/ft )Document2 pagesTable 5-3 - (Standards Table 146-F) Area Category Method - Lighting Power Density Values (Watts/ft )Gajendra SinghNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- 12v 40w High Lumen Stand Alone Smart Led Solar Power Street Light - Buy Stand Alone Solar Street Light, Solar Power Street Light, Led Solar Street Light Product On AlibabaDocument18 pages12v 40w High Lumen Stand Alone Smart Led Solar Power Street Light - Buy Stand Alone Solar Street Light, Solar Power Street Light, Led Solar Street Light Product On AlibabaGajendra SinghNo ratings yet
- Contractor Quality Control Plan For Electrical Equipment InstallationDocument7 pagesContractor Quality Control Plan For Electrical Equipment Installationhasan_676489616No ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- 3.0 - Part-II Tender Tech SpecificationDocument289 pages3.0 - Part-II Tender Tech SpecificationGajendra SinghNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Technical Specifications and GTP For 11KV XLPE Cable SP 574Document13 pagesTechnical Specifications and GTP For 11KV XLPE Cable SP 574hafizrahimmitNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Voyants Solutions Pvt. LTD.: Capability Profile (Power System)Document29 pagesVoyants Solutions Pvt. LTD.: Capability Profile (Power System)Gajendra SinghNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Guidelines Network DesignDocument3 pagesGuidelines Network DesignsachinoilNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- 3.0 - Part-II Tender Tech SpecificationDocument289 pages3.0 - Part-II Tender Tech SpecificationGajendra SinghNo ratings yet
- Short Circuit Current CalculationDocument7 pagesShort Circuit Current CalculationKalyan RanjanNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- How Much Roof Area Do I Require To Install A Rooftop Solar PV System - Solar Mango - #1 Guide For SolarDocument8 pagesHow Much Roof Area Do I Require To Install A Rooftop Solar PV System - Solar Mango - #1 Guide For SolarGajendra SinghNo ratings yet
- HD - 5.6 Schedule of Electrical RequirementsDocument83 pagesHD - 5.6 Schedule of Electrical RequirementsGajendra SinghNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- 7 TechnicalspecificationforelectricalworkDocument147 pages7 TechnicalspecificationforelectricalworkGajendra SinghNo ratings yet
- Electrical Installations in High Rise BuildingsDocument10 pagesElectrical Installations in High Rise BuildingsAhmedRaafat75% (8)
- 859 PDFDocument356 pages859 PDFSAMICDPNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Relay Symbols and Fuction NumDocument14 pagesRelay Symbols and Fuction NumPrasanna DharmapriyaNo ratings yet
- Power MapsDocument53 pagesPower MapsGajendra SinghNo ratings yet
- Eenergy Efficency Transformer Losses PDFDocument1 pageEenergy Efficency Transformer Losses PDFGajendra SinghNo ratings yet
- Drafting Transmission Plan and Profile Drawings Directly From PLS-CADDDocument41 pagesDrafting Transmission Plan and Profile Drawings Directly From PLS-CADDGajendra SinghNo ratings yet
- Thirumalayapalem Mandal: Warangal DistrictDocument1 pageThirumalayapalem Mandal: Warangal DistrictInapanuri Nageshwara RaoNo ratings yet
- Aircraft Communication and NavigationDocument14 pagesAircraft Communication and NavigationShakil Mahmud60% (5)
- Steel Unity CheckDocument63 pagesSteel Unity CheckKyle CasanguanNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- HEGN (Hurghada Intl)Document10 pagesHEGN (Hurghada Intl)Seyi WilliamsNo ratings yet
- Latitude and Longitude:: Finding Locations On Planet EarthDocument17 pagesLatitude and Longitude:: Finding Locations On Planet EarthJan Marlon GoritNo ratings yet
- Modern Air Traffic ControlDocument12 pagesModern Air Traffic Controlnikhilesh waldeNo ratings yet
- Visual Navigation For Mobile Robots: A SurveyDocument26 pagesVisual Navigation For Mobile Robots: A Surveyb_siscoNo ratings yet
- Cartas MonteriaDocument11 pagesCartas MonteriaDIEGO RICARDO CARRIAZO NIMISICANo ratings yet
- Military Map Reading: Version 2.0 Dated December 2010Document44 pagesMilitary Map Reading: Version 2.0 Dated December 2010Ron FisherNo ratings yet
- 2016 Subaru Outback 76Document308 pages2016 Subaru Outback 76Armands AuzinsNo ratings yet
- Map Skills BookletDocument32 pagesMap Skills BookletFareen S Fareen100% (1)
- Navaid For Jetty Mast Data SheetDocument2 pagesNavaid For Jetty Mast Data SheetbenNo ratings yet
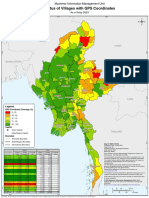
- Status of Villages With GPS Coordinates MIMU1136v08 03may2023 A3Document1 pageStatus of Villages With GPS Coordinates MIMU1136v08 03may2023 A3thethtet28No ratings yet
- Irs InsDocument6 pagesIrs Insadrian hNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Monday Tuesday Wednesday Thursday Friday: GRADES 1 To 12 Daily Lesson LogDocument5 pagesMonday Tuesday Wednesday Thursday Friday: GRADES 1 To 12 Daily Lesson LogNorolyn SantosNo ratings yet
- Gyro Compass The Free GyroscopeDocument7 pagesGyro Compass The Free GyroscopeJJohn GGnanavelu100% (2)
- GUIDANCE and NAVIGATION For Rendezvous With Uncooperative TargetDocument18 pagesGUIDANCE and NAVIGATION For Rendezvous With Uncooperative TargetSethurajan ShanmugamNo ratings yet
- Science 7 TimeZone Students Copy CompressedDocument87 pagesScience 7 TimeZone Students Copy Compressedstarrynx1No ratings yet
- IPD 10 Soal Plan ADocument3 pagesIPD 10 Soal Plan Aoctavian ekaNo ratings yet
- SimradPro 2014 Global BDocument44 pagesSimradPro 2014 Global Bwanderson1974No ratings yet
- Review Weekly Persentation PT. HillconjayasaktiDocument18 pagesReview Weekly Persentation PT. HillconjayasaktiEnos PaembonanNo ratings yet
- Decca Navigator - HistoryDocument17 pagesDecca Navigator - HistoryadulphusjuhnosNo ratings yet
- Tug Insurance Survey FormDocument15 pagesTug Insurance Survey FormAnonymous ycFeyuLAtNo ratings yet
- India DG Shipping - 2nd Mates SyllabusDocument9 pagesIndia DG Shipping - 2nd Mates SyllabusJayesh SolaskarNo ratings yet
- Garmin G3X TouchDocument480 pagesGarmin G3X TouchGustavo MacedoNo ratings yet
- L2 - Angle and Bearing Measurement PDFDocument32 pagesL2 - Angle and Bearing Measurement PDFsyahir imanNo ratings yet
- Deck Procedures Manual (DPM)Document344 pagesDeck Procedures Manual (DPM)Gogita Jaiani100% (2)
- GPSDocument12 pagesGPSMosiour RahmanNo ratings yet
- LCC & UtmDocument5 pagesLCC & Utmali_bse2301No ratings yet
- CW ReadingsnmDocument79 pagesCW ReadingsnmAbdul SaboorkhanNo ratings yet
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- Water to the Angels: William Mulholland, His Monumental Aqueduct, and the Rise of Los AngelesFrom EverandWater to the Angels: William Mulholland, His Monumental Aqueduct, and the Rise of Los AngelesRating: 4 out of 5 stars4/5 (21)
- Periodic Tales: A Cultural History of the Elements, from Arsenic to ZincFrom EverandPeriodic Tales: A Cultural History of the Elements, from Arsenic to ZincRating: 3.5 out of 5 stars3.5/5 (137)