You might also like
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- Principles of DC MotorsDocument14 pagesPrinciples of DC MotorsAravind Raj PandianNo ratings yet
- 3.6 H-BRIDGE Motor Driver (L293D)Document6 pages3.6 H-BRIDGE Motor Driver (L293D)darshan_077No ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- DC Motor Lab: 1.1 The ExperimentDocument9 pagesDC Motor Lab: 1.1 The ExperimentTammanurRaviNo ratings yet
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsFrom EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsNo ratings yet
- Assignment 2 Ac DCDocument15 pagesAssignment 2 Ac DCVincoy JohnlloydNo ratings yet
- Assignment 2 Ac DCDocument15 pagesAssignment 2 Ac DCVincoy JohnlloydNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- TechportDocument6 pagesTechportMaureen TatadNo ratings yet
- A New System of Alternating Current Motors and TransformersFrom EverandA New System of Alternating Current Motors and TransformersRating: 1 out of 5 stars1/5 (1)
- An Introduction To Brushless DC Motor ControlDocument33 pagesAn Introduction To Brushless DC Motor ControlIgor TrimcevskiNo ratings yet
- Ac Motors: AC Electric Motor Family DiagramDocument80 pagesAc Motors: AC Electric Motor Family Diagramthulasi_krishnaNo ratings yet
- Auto-Transformer Design - A Practical Handbook for Manufacturers, Contractors and WiremenFrom EverandAuto-Transformer Design - A Practical Handbook for Manufacturers, Contractors and WiremenRating: 4 out of 5 stars4/5 (2)
- PTC1Document5 pagesPTC1jay shahNo ratings yet
- Brushless DC MotorsDocument7 pagesBrushless DC MotorsRonald LugwireNo ratings yet
- Brushless DC Motors: An Introduction to Their Construction, Working Principles and AdvantagesDocument21 pagesBrushless DC Motors: An Introduction to Their Construction, Working Principles and AdvantagesSRL MECHNo ratings yet
- BLDC Motor Guide: Brushless DC Motor Technology ExplainedDocument8 pagesBLDC Motor Guide: Brushless DC Motor Technology ExplainedSondur LohithNo ratings yet
- Brushless DC (BLDC) Motor FundamentalsDocument20 pagesBrushless DC (BLDC) Motor FundamentalsEdo007100% (1)
- Application of DC Shunt Motor: Lovely Professional University Amit Raj ROLL NO-RB4802A28 Reg. No-10803543 B.Tech - MEDocument5 pagesApplication of DC Shunt Motor: Lovely Professional University Amit Raj ROLL NO-RB4802A28 Reg. No-10803543 B.Tech - MEshailesh singhNo ratings yet
- Scotch Yoke MechanismDocument37 pagesScotch Yoke MechanismSaravanan Viswakarma100% (1)
- DC Motor: Motors Motor Motors Motors Motors MotorDocument6 pagesDC Motor: Motors Motor Motors Motors Motors MotorAvd KishoreNo ratings yet
- Commutator electrical switchDocument12 pagesCommutator electrical switchIhsan MuhammadNo ratings yet
- Stator and rotor of single phase induction motorDocument5 pagesStator and rotor of single phase induction motorjay shahNo ratings yet
- EES (Lec20)Document16 pagesEES (Lec20)Muhammad SagheerNo ratings yet
- Brushless DC MotorsDocument6 pagesBrushless DC Motorssheela lNo ratings yet
- Brushed DC Electric MotorDocument14 pagesBrushed DC Electric MotorSadeep MadhushanNo ratings yet
- Experiment No. 2.4 - The Squirrel-Cage Induction Motor ObjectiveDocument3 pagesExperiment No. 2.4 - The Squirrel-Cage Induction Motor ObjectiveKristine AldayNo ratings yet
- Reluctance MotorDocument14 pagesReluctance Motortheodorakis017781No ratings yet
- Assignment Ac DCDocument10 pagesAssignment Ac DCKamil KhairiNo ratings yet
- Workshop II ManualDocument76 pagesWorkshop II Manualzelalem walie100% (1)
- Motor & Thermistor FundaDocument10 pagesMotor & Thermistor Fundajay shahNo ratings yet
- Chapter-3 Induction Machines: I E M & P SDocument112 pagesChapter-3 Induction Machines: I E M & P SLim Kai XuanNo ratings yet
- Tema1 - 4 - Otras Maquinas - 2020 - 21Document82 pagesTema1 - 4 - Otras Maquinas - 2020 - 21airtonNo ratings yet
- Solar Grass Cutter MechanismDocument38 pagesSolar Grass Cutter MechanismAakash DindigulNo ratings yet
- 4 Motors: D.C. Motors Principles of D.C. MotorsDocument10 pages4 Motors: D.C. Motors Principles of D.C. MotorsmanjunathagNo ratings yet
- What is the function of commutator in DC motorDocument4 pagesWhat is the function of commutator in DC motorSovanNo ratings yet
- Commutator (Electric) : From Wikipedia, The Free EncyclopediaDocument11 pagesCommutator (Electric) : From Wikipedia, The Free Encyclopediagelo_17100% (1)
- Application of DC Shunt MotorDocument5 pagesApplication of DC Shunt MotorPrajwal Deep RaiNo ratings yet
- Brushless DC Electric Motor - Wikipedia, The Free EncyclopediaDocument14 pagesBrushless DC Electric Motor - Wikipedia, The Free EncyclopediaSailesh ReddyNo ratings yet
- EPO640 Electrical Drives: BLDC and Stepper MotorsDocument36 pagesEPO640 Electrical Drives: BLDC and Stepper MotorsZariz ZakianNo ratings yet
- Electromagnetic Clutch SystemDocument10 pagesElectromagnetic Clutch SystemALAGANDULA NIKHILNo ratings yet
- Induction, Squirrel Cage Motor - Torque CalculationDocument10 pagesInduction, Squirrel Cage Motor - Torque CalculationAlexandra100% (1)
- Motors and DrivesDocument23 pagesMotors and DrivesharishkumarsinghNo ratings yet
- DC MotorDocument21 pagesDC MotorSameera MadhushankaNo ratings yet
- Experiment # 7 Load Test of A Three Phase Induction MotorDocument22 pagesExperiment # 7 Load Test of A Three Phase Induction MotorKumar shantanu BasakNo ratings yet
- CuuterDocument42 pagesCuuterHari KishorNo ratings yet
- Complete Presentation by MUNEEBDocument35 pagesComplete Presentation by MUNEEBburhankh1No ratings yet
- Electrical MotorDocument55 pagesElectrical Motorabdulkadhir100% (1)
- SChapter13 The Adams MotorGeneratorDocument14 pagesSChapter13 The Adams MotorGeneratorpranalar100% (1)
- DC MotorDocument7 pagesDC MotorSusan BayleNo ratings yet
- Eee-233 R1Document14 pagesEee-233 R1ArifNo ratings yet
- ELE290 Chapter 6Document21 pagesELE290 Chapter 6imfendiNo ratings yet
- Brushed DC Electric Motor - WikipediaDocument63 pagesBrushed DC Electric Motor - WikipediaKISHORE PERUMALLANo ratings yet
- AC MotorDocument22 pagesAC MotorMoise CristinaNo ratings yet
- PM BDC Motor - For MinorDocument13 pagesPM BDC Motor - For MinorVaibhav KhokharNo ratings yet
- Brushless DC MotorDocument13 pagesBrushless DC MotorYova PrameswariNo ratings yet
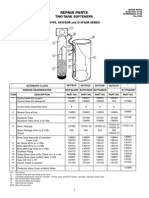
- Star S07FS32DR Water Softener Repair PartsDocument1 pageStar S07FS32DR Water Softener Repair PartsBillNo ratings yet
- Grade 6 Science PuzzleDocument4 pagesGrade 6 Science Puzzlemargie riveraNo ratings yet
- CNC Meldas 60-60sDocument300 pagesCNC Meldas 60-60schidambaram kasiNo ratings yet
- Design Rules CMOS Transistor LayoutDocument7 pagesDesign Rules CMOS Transistor LayoututpalwxyzNo ratings yet
- Search Engine Collocations Frequency PhrasesDocument2 pagesSearch Engine Collocations Frequency PhrasesDinda NoviarmachdaNo ratings yet
- Process Thermodynamic Steam Trap PDFDocument9 pagesProcess Thermodynamic Steam Trap PDFhirenkumar patelNo ratings yet
- DTOcean - Optimal Design Tools For Ocean Energy ArraysDocument94 pagesDTOcean - Optimal Design Tools For Ocean Energy ArraysWilson NevesNo ratings yet
- Applying The Haar Wavelet Transform To Time Series InformationDocument27 pagesApplying The Haar Wavelet Transform To Time Series InformationJohn LemonNo ratings yet
- System Engineering Management Plan (SEMPDocument2 pagesSystem Engineering Management Plan (SEMPKatie WestNo ratings yet
- Software Hardware Tech x86 VirtDocument9 pagesSoftware Hardware Tech x86 VirtwyfwongNo ratings yet
- Budget EstimatesDocument251 pagesBudget EstimatesMUHAMMAD QASIM RAJPARNo ratings yet
- B737-B787 QRH Differences: 787 NNC Includes Emergency DescentDocument13 pagesB737-B787 QRH Differences: 787 NNC Includes Emergency DescentUfuk AydinNo ratings yet
- Jotafloor SL UniversalDocument6 pagesJotafloor SL UniversalrogandatambunanNo ratings yet
- Advances in Remediation-eBookDocument88 pagesAdvances in Remediation-eBookalinerlfNo ratings yet
- Battery Testing and MaintenanceDocument23 pagesBattery Testing and MaintenanceMormor Omerta0% (1)
- E12817 GT AC5300 Manual EnglishDocument152 pagesE12817 GT AC5300 Manual Englishlegato1984No ratings yet
- JonWeisseBUS450 04 HPDocument3 pagesJonWeisseBUS450 04 HPJonathan WeisseNo ratings yet
- Brake Pedals and ValveDocument4 pagesBrake Pedals and Valveala17No ratings yet
- Strength of A440 Steel Joints Connected With A325 Bolts PublicatDocument52 pagesStrength of A440 Steel Joints Connected With A325 Bolts Publicathal9000_mark1No ratings yet
- Touch Panel Debug Info Register ValuesDocument17 pagesTouch Panel Debug Info Register ValuesAlghazyNo ratings yet
- Stock Register StoreDocument1,218 pagesStock Register StoreSantanu Kumar SahuNo ratings yet
- 1HD-T - 1 Land Cruiser Engine Service ManualDocument26 pages1HD-T - 1 Land Cruiser Engine Service ManualMichael Dzidowski86% (7)
- TNB AR 2022 Corporate StructureDocument2 pagesTNB AR 2022 Corporate StructureZamzuri P AminNo ratings yet
- Engineering Data, Summary of Productivity 2022Document2 pagesEngineering Data, Summary of Productivity 2022Listya AnggrainiNo ratings yet
- GPT 1-15 LineBackerDocument4 pagesGPT 1-15 LineBackerazadeazNo ratings yet
- Strategic Information Systems Planning: Course OverviewDocument18 pagesStrategic Information Systems Planning: Course OverviewEmmy W. RosyidiNo ratings yet
- 1893 Shadow RunDocument6 pages1893 Shadow RungibbamonNo ratings yet
- Human Plus Machine A New Era of Automation in ManufacturingDocument8 pagesHuman Plus Machine A New Era of Automation in ManufacturingDuarte CRosaNo ratings yet
- Air Pak SCBA Ordering Specifications (HS 6701)Document8 pagesAir Pak SCBA Ordering Specifications (HS 6701)QHSE ManagerNo ratings yet
- General Ledger Senior Accountant in Charlotte NC Resume Diana ShipeDocument1 pageGeneral Ledger Senior Accountant in Charlotte NC Resume Diana ShipeDianaShipeNo ratings yet
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (542)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsFrom EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsRating: 4 out of 5 stars4/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemFrom EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNo ratings yet
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsFrom EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsRating: 5 out of 5 stars5/5 (2)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowFrom EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowNo ratings yet
- Understanding Automotive Electronics: An Engineering PerspectiveFrom EverandUnderstanding Automotive Electronics: An Engineering PerspectiveRating: 3.5 out of 5 stars3.5/5 (16)
- Build Your Own Electric Vehicle, Third EditionFrom EverandBuild Your Own Electric Vehicle, Third EditionRating: 4.5 out of 5 stars4.5/5 (3)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- The Rare Metals War: the dark side of clean energy and digital technologiesFrom EverandThe Rare Metals War: the dark side of clean energy and digital technologiesRating: 5 out of 5 stars5/5 (2)
- Operational Amplifier Circuits: Analysis and DesignFrom EverandOperational Amplifier Circuits: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (2)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- Digital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsFrom EverandDigital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsRating: 5 out of 5 stars5/5 (3)
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- The Graphene Revolution: The Weird Science of the Ultra-thinFrom EverandThe Graphene Revolution: The Weird Science of the Ultra-thinRating: 4.5 out of 5 stars4.5/5 (4)
- Electrical Principles and Technology for EngineeringFrom EverandElectrical Principles and Technology for EngineeringRating: 4 out of 5 stars4/5 (4)