You might also like
- Stability Enhancement of DFIG-Based Offshore Wind Farm Fed To A Multi-Machine System Using A STATCOMDocument8 pagesStability Enhancement of DFIG-Based Offshore Wind Farm Fed To A Multi-Machine System Using A STATCOMAhmed WestministerNo ratings yet
- SVC STATCOM Wind FirmDocument8 pagesSVC STATCOM Wind FirmFAIYAJ limonNo ratings yet
- Ijetr022670 PDFDocument6 pagesIjetr022670 PDFerpublicationNo ratings yet
- Application of STATCOM For Improved Reliability of Power Grid Containing A Wind TurbineDocument7 pagesApplication of STATCOM For Improved Reliability of Power Grid Containing A Wind TurbineWajahat Ullah Khan TareenNo ratings yet
- Poland - Field - Experience - With - Statcom - in - Application - To - Wind - FarmsDocument5 pagesPoland - Field - Experience - With - Statcom - in - Application - To - Wind - FarmsFeras ObeidNo ratings yet
- 2804 Submission 3203 1 10 20220630Document17 pages2804 Submission 3203 1 10 20220630Mohamed Riyad BoudallaaNo ratings yet
- A Combined Approach of Using An SDBR and A Statcom To Enhance The Stability of A Wind FarmDocument14 pagesA Combined Approach of Using An SDBR and A Statcom To Enhance The Stability of A Wind FarmrajapandiyaNo ratings yet
- Dynamic Voltage Stability Enhancement of A Grid-Connected Wind Power System by ANFIS Controlled Static Var CompensatorDocument4 pagesDynamic Voltage Stability Enhancement of A Grid-Connected Wind Power System by ANFIS Controlled Static Var CompensatorEngr GM SialNo ratings yet
- International Journal of EngineeringDocument9 pagesInternational Journal of EngineeringDéjàvu ChongNo ratings yet
- Performance and Analysis of STATCOM For Damping Power System Disturbances Using Fuzzy Logic ControllerDocument11 pagesPerformance and Analysis of STATCOM For Damping Power System Disturbances Using Fuzzy Logic ControllerBerhanu ZelalemNo ratings yet
- A New Fuzzy Logic Based Control Strategy For Variable Speed Wind Generator To Enhance The Transient Stability of Fixed Speed Wind GeneratorDocument6 pagesA New Fuzzy Logic Based Control Strategy For Variable Speed Wind Generator To Enhance The Transient Stability of Fixed Speed Wind GeneratorSagiraju DileepNo ratings yet
- PPT of Sona CLGDocument24 pagesPPT of Sona CLGRam kumarNo ratings yet
- An Adaptive Power Oscillation Damping Controller by STATCOM With Energy StorageDocument10 pagesAn Adaptive Power Oscillation Damping Controller by STATCOM With Energy StorageB. Vikram AnandNo ratings yet
- 2nd Reference PaperDocument4 pages2nd Reference PaperTeja BhogadiNo ratings yet
- IEEEDocument9 pagesIEEESagiraju DileepNo ratings yet
- Autonomous Hybrid System Using Pmsgs For Hydro and Wind Power GenerationDocument6 pagesAutonomous Hybrid System Using Pmsgs For Hydro and Wind Power GenerationVineet P ChandranNo ratings yet
- Rating Requirements of The Unified Power Quality Conditioner To Integrate The Fixed-Speed Induction Generator-Type Wind Generation To The GridDocument11 pagesRating Requirements of The Unified Power Quality Conditioner To Integrate The Fixed-Speed Induction Generator-Type Wind Generation To The GridPoulomi GangulyNo ratings yet
- Wind Farms Fault Ride Through Using DFIG With New Protection SchemeDocument13 pagesWind Farms Fault Ride Through Using DFIG With New Protection SchemetissatomNo ratings yet
- Kumar 2021Document17 pagesKumar 2021FAIYAJ limonNo ratings yet
- IJETR031160Document5 pagesIJETR031160erpublicationNo ratings yet
- Impact of Large Offshore Wind Farms On Power System Transient StabilityDocument8 pagesImpact of Large Offshore Wind Farms On Power System Transient StabilityMadhusudhan SrinivasanNo ratings yet
- Elearnica Ir SSR Damping in WindDocument10 pagesElearnica Ir SSR Damping in WindGanesh DuraisamyNo ratings yet
- Power Quality Improvement of PMSG Based DG Set Feeding Three-Phase LoadsDocument6 pagesPower Quality Improvement of PMSG Based DG Set Feeding Three-Phase LoadsHitesh JoshiNo ratings yet
- Enhancing Power System Stability of Wind Farm Equipped With Permanent Magnet Synchronous Generator Using Back To Back ConvertorDocument6 pagesEnhancing Power System Stability of Wind Farm Equipped With Permanent Magnet Synchronous Generator Using Back To Back ConvertorMahendiran CrNo ratings yet
- Voltage Stability For Hybrid Power System Feeding Loads in IsolationDocument4 pagesVoltage Stability For Hybrid Power System Feeding Loads in IsolationerpublicationNo ratings yet
- IJETR021123Document5 pagesIJETR021123erpublicationNo ratings yet
- Electric Power Systems Research: Hossein Ali Mohammadpour, Amin Ghaderi, Hassan Mohammadpour, Enrico SantiDocument3 pagesElectric Power Systems Research: Hossein Ali Mohammadpour, Amin Ghaderi, Hassan Mohammadpour, Enrico SantiNDA BandNo ratings yet
- A Novel DVR-ESS Embedded Wind Energy Conversion System Abstract - This Paper Proposes A NovelDocument8 pagesA Novel DVR-ESS Embedded Wind Energy Conversion System Abstract - This Paper Proposes A NovelGreenCornerTech NlrNo ratings yet
- Optimization of Power Factor and Energy Management in Wind Energy StationDocument8 pagesOptimization of Power Factor and Energy Management in Wind Energy StationNishant AnandNo ratings yet
- 4 Jaras Mar 2020Document8 pages4 Jaras Mar 2020Ravikumaar RayalaNo ratings yet
- Static Synchronous Compensator (SATACOM) Performance For Grid - Connected Wind TurbinesDocument6 pagesStatic Synchronous Compensator (SATACOM) Performance For Grid - Connected Wind TurbinesIJOCAASNo ratings yet
- DFIG Weak Grid 2020Document9 pagesDFIG Weak Grid 2020ALI BOUKHRISSNo ratings yet
- Electric Power Systems ResearchDocument9 pagesElectric Power Systems Researchhussein assiNo ratings yet
- Tahir 2016Document16 pagesTahir 2016khaledNo ratings yet
- 1 s2.0 S0142061523000674 MainDocument10 pages1 s2.0 S0142061523000674 MainjamesNo ratings yet
- Enhancement of Voltage Profile by The Performance of PMSG-Based Wind Power Generator by Using The Fuzzy Logic ControllerDocument7 pagesEnhancement of Voltage Profile by The Performance of PMSG-Based Wind Power Generator by Using The Fuzzy Logic ControllerMadhava ReddyNo ratings yet
- Control of Grid Side Converter in Wind Power Based PMSG With PLL MethodDocument10 pagesControl of Grid Side Converter in Wind Power Based PMSG With PLL MethodItran AzalNo ratings yet
- Dynamic CompensationDocument6 pagesDynamic Compensationhiabhijit29No ratings yet
- Dstatcom BessDocument7 pagesDstatcom BessSYAHRUN MUBAROKNo ratings yet
- Raviraju Published PaperDocument10 pagesRaviraju Published Paperraviraju2498No ratings yet
- A Fuzzy Based Improved Control Strategy of DynamicDocument27 pagesA Fuzzy Based Improved Control Strategy of DynamicMatlab IEEENo ratings yet
- Integration: Comparison of Using and For Wind FarmDocument7 pagesIntegration: Comparison of Using and For Wind FarmjorgeNo ratings yet
- Adrc PMSG JeetDocument14 pagesAdrc PMSG JeetDileep VarmaNo ratings yet
- Experimental Research and Control of PMSG Based Wind Turbine Connected To GridDocument10 pagesExperimental Research and Control of PMSG Based Wind Turbine Connected To Grid65Priya YadavNo ratings yet
- STATCOM Based Power Quality Improvement in Hybrid Power SystemDocument5 pagesSTATCOM Based Power Quality Improvement in Hybrid Power System20bee084No ratings yet
- Psat Wind FactDocument6 pagesPsat Wind FactSandeep KumarNo ratings yet
- Improving The Voltage Stability of The Nigeria 44 - Bus 330KV Power Transmission Network Using ANN Based Adaptive STATCOM DeviceDocument12 pagesImproving The Voltage Stability of The Nigeria 44 - Bus 330KV Power Transmission Network Using ANN Based Adaptive STATCOM DeviceIJAERS JOURNAL100% (1)
- Mitigation of Voltage Sag, Swell in Hybrid Power System Using DstatcomDocument12 pagesMitigation of Voltage Sag, Swell in Hybrid Power System Using DstatcomNeerajNo ratings yet
- IJETR021123Document5 pagesIJETR021123Binda MridulabalakrishnanNo ratings yet
- Ap PL Ica Io of Statcoms Wind Farms: B. E KaDocument6 pagesAp PL Ica Io of Statcoms Wind Farms: B. E KaBHARADWAJ CHIVUKULANo ratings yet
- STATCOM-Based Voltage Regulation in Grid Integrated Wind Farm Under Variable Loading ConditionsDocument6 pagesSTATCOM-Based Voltage Regulation in Grid Integrated Wind Farm Under Variable Loading ConditionsIman AminiNo ratings yet
- (1339309X - Journal of Electrical Engineering) Voltage Regulation and Power Losses Reduction in A Wind Farm Integrated MV Distribution NetworkDocument8 pages(1339309X - Journal of Electrical Engineering) Voltage Regulation and Power Losses Reduction in A Wind Farm Integrated MV Distribution NetworkDivyansh Singh ChauhanNo ratings yet
- Modeling of A Droop-Controlled Grid-Connected DFIG Wind TurbineDocument12 pagesModeling of A Droop-Controlled Grid-Connected DFIG Wind Turbine196c1a0214 Mohammad Farheen SiddiqahNo ratings yet
- Conroy2008 PDFDocument8 pagesConroy2008 PDFPedro SCNo ratings yet
- Voltage Profile Improvement For Distributed Wind Generation Using D-STATCOMDocument6 pagesVoltage Profile Improvement For Distributed Wind Generation Using D-STATCOMIman AminiNo ratings yet
- Statcom ApplicationDocument5 pagesStatcom ApplicationJournalNX - a Multidisciplinary Peer Reviewed Journal100% (1)
- Mat LabDocument74 pagesMat LabA RakeshNo ratings yet
- JIMMA UNIVERSITY ReviewDocument19 pagesJIMMA UNIVERSITY Reviewgadisa fayeraNo ratings yet
- Chapter - 6 Conclusion and Scope For Future WorkDocument4 pagesChapter - 6 Conclusion and Scope For Future WorkHamxa AmeerNo ratings yet
- Upgrading The ProtectionDocument4 pagesUpgrading The ProtectionMukesh KumarNo ratings yet
- Revision Paper Physics-12, Unit-XiDocument2 pagesRevision Paper Physics-12, Unit-XiroshanvalexNo ratings yet
- PKA-RP2.5FAL Pka-Rp3Fal Pka-Rp4Fal: Technical & Service ManualDocument56 pagesPKA-RP2.5FAL Pka-Rp3Fal Pka-Rp4Fal: Technical & Service ManualMihaela CaciumarciucNo ratings yet
- E101 Lab Report Group 4Document8 pagesE101 Lab Report Group 4Julia LovinoNo ratings yet
- STK0380P: PreliminaryDocument4 pagesSTK0380P: PreliminaryHaider AliNo ratings yet
- Natural Draught and Chimney - 1Document1 pageNatural Draught and Chimney - 1Sam RagNo ratings yet
- HW3 B SolutionsDocument7 pagesHW3 B SolutionsAli Abbas SheriffNo ratings yet
- MARATHON - M12V105FT BatteriesDocument12 pagesMARATHON - M12V105FT BatteriesAntonio Fernandez GonzalezNo ratings yet
- June 2014 (R) MA - M1 EdexcelDocument9 pagesJune 2014 (R) MA - M1 EdexcelKollol KolllolNo ratings yet
- Interference of Light Waves: ObjectivesDocument25 pagesInterference of Light Waves: Objectivesjay singhviNo ratings yet
- Manual PDFDocument750 pagesManual PDFTRONGNo ratings yet
- Natural Science Lab C683Document6 pagesNatural Science Lab C683Alisa Alexandra GatejNo ratings yet
- XQ1475 Lehx0010 01Document8 pagesXQ1475 Lehx0010 01gsantosh06No ratings yet
- Mig Sonic 200 CVCC Service ManualDocument65 pagesMig Sonic 200 CVCC Service Manualbuggy bugger100% (1)
- 06 Dielectrics Capacitance 2018mkDocument41 pages06 Dielectrics Capacitance 2018mkTrần ĐứcAnhNo ratings yet
- CRKTCT - 19. A Capacitor With Capacitance 0.1F in An RC Circuit Is Initially Charged Up ToDocument5 pagesCRKTCT - 19. A Capacitor With Capacitance 0.1F in An RC Circuit Is Initially Charged Up ToWilburNo ratings yet
- Experiment 01Document15 pagesExperiment 01frank samndomiNo ratings yet
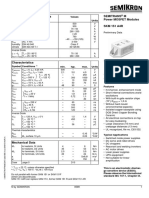
- Absolute Maximum Ratings Semitrans M Power MOSFET Modules SKM 151 A4RDocument5 pagesAbsolute Maximum Ratings Semitrans M Power MOSFET Modules SKM 151 A4RChaovalit Jitsinthu100% (1)
- Unified Power Flow ControllerDocument17 pagesUnified Power Flow ControllerAdeniji Olusegun50% (2)
- The Hall Effect-1Document4 pagesThe Hall Effect-1lewyn.socialNo ratings yet
- Mass Transfer 1 CLB 20804Document54 pagesMass Transfer 1 CLB 20804KumaranNo ratings yet
- MATHS UNIT-2b - 15012019Document43 pagesMATHS UNIT-2b - 15012019Susheel GuptaNo ratings yet
- Bulk Density ("Unit Weight") and Voids in Aggregate: Standard Test Method ForDocument4 pagesBulk Density ("Unit Weight") and Voids in Aggregate: Standard Test Method ForJhon Paul EstopinNo ratings yet
- E2488 092014 Standard Guide ForDocument8 pagesE2488 092014 Standard Guide ForBAN ZANGHANANo ratings yet
- Fundamentals of Electric Circuits Basic ConceptsDocument15 pagesFundamentals of Electric Circuits Basic ConceptsThiruppathy KesavanNo ratings yet
- 26 Solution of TriangleDocument20 pages26 Solution of TriangleSachin KumarNo ratings yet
- 182590-615ASTRO-N7 CHSM72NDGF-BH 2382x1134x30 EN 20230802Document2 pages182590-615ASTRO-N7 CHSM72NDGF-BH 2382x1134x30 EN 20230802Gilberto SousaNo ratings yet
- Smart Power Generation by Wasted HeatDocument5 pagesSmart Power Generation by Wasted HeatVedant ChoudharyNo ratings yet
- Flare Calc Sheet API RP 521Document9 pagesFlare Calc Sheet API RP 521Clarence AG YueNo ratings yet