You might also like
- ChasisDocument6 pagesChasisScott ReedNo ratings yet
- Animales FantasticosDocument3 pagesAnimales FantasticosScott ReedNo ratings yet
- Word ImagenesDocument10 pagesWord ImagenesScott ReedNo ratings yet
- Reaccion Alcali AgregadoDocument115 pagesReaccion Alcali AgregadoHypatia RiverosNo ratings yet
- Imprimir DVDDocument2 pagesImprimir DVDScott ReedNo ratings yet
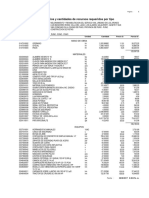
- Insumos PistasDocument2 pagesInsumos PistasScott ReedNo ratings yet
- Junio 2018 Sandia EdsilDocument23 pagesJunio 2018 Sandia EdsilScott ReedNo ratings yet
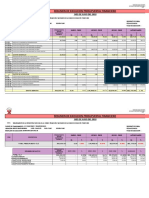
- Plan de Trabajo de Plan Mantenimiento de Vias Vecinales Del Distrito de ChucuitoDocument5 pagesPlan de Trabajo de Plan Mantenimiento de Vias Vecinales Del Distrito de ChucuitoScott Reed100% (1)
- Mision Vision EpicDocument1 pageMision Vision EpicScott ReedNo ratings yet
- Apuntes de FerrocarrilesDocument41 pagesApuntes de FerrocarrilesScott ReedNo ratings yet
- Perfilde Tesis AcoraDocument9 pagesPerfilde Tesis AcoraScott ReedNo ratings yet
- Formato Proy Tesis 2016Document3 pagesFormato Proy Tesis 2016Percy M. SucariNo ratings yet
- Sumak Kawsay o Buen VivirDocument6 pagesSumak Kawsay o Buen VivirScott ReedNo ratings yet
- Romanticism oDocument7 pagesRomanticism oScott ReedNo ratings yet
- Harry Potter y La Camara SecretaDocument13 pagesHarry Potter y La Camara SecretaScott Reed20% (5)
- Literatura: ÍndiceDocument2 pagesLiteratura: ÍndiceJohana RuizNo ratings yet
- Año Del Buen Servicio Al CiudadanoDocument1 pageAño Del Buen Servicio Al CiudadanoScott ReedNo ratings yet
- La Renuncia Del Papa Benedicto XVIDocument2 pagesLa Renuncia Del Papa Benedicto XVIScott ReedNo ratings yet
- ETICADocument8 pagesETICAScott ReedNo ratings yet
- Imprimir Proyecto Lizbeth MarilynDocument13 pagesImprimir Proyecto Lizbeth MarilynScott ReedNo ratings yet
- Camarlengo de La Iglesia CatólicaDocument3 pagesCamarlengo de La Iglesia CatólicaScott ReedNo ratings yet
- Harry Potter y La Piedra FilosofalDocument16 pagesHarry Potter y La Piedra FilosofalScott Reed0% (1)
- Harry Potter y El Prisionero de AzkabanDocument17 pagesHarry Potter y El Prisionero de AzkabanScott ReedNo ratings yet
- Harry PotterDocument13 pagesHarry PotterScott ReedNo ratings yet
- EclipseDocument2 pagesEclipseScott ReedNo ratings yet
- AmanecerDocument2 pagesAmanecerScott ReedNo ratings yet
- CrepúsculoDocument1 pageCrepúsculojuanclopez96No ratings yet
- Una Puno 23Document1 pageUna Puno 23Scott ReedNo ratings yet
- Apuntes de FerrocarrilesDocument41 pagesApuntes de FerrocarrilesScott ReedNo ratings yet
- TEORÍA DE MÁQUINAS - Semana 02bDocument24 pagesTEORÍA DE MÁQUINAS - Semana 02bMigue Saenz QuispeNo ratings yet
- Metodo de FlexibilidadesDocument16 pagesMetodo de Flexibilidadesluisal88No ratings yet
- 14 MecanismosDocument19 pages14 MecanismosSantiago ÁlvarezNo ratings yet
- Análisis y Síntesis de Mecanismos 1Document59 pagesAnálisis y Síntesis de Mecanismos 1Omar Negrin Mendez0% (1)
- Introducción A La VibraciónDocument18 pagesIntroducción A La VibraciónChica LunarNo ratings yet
- EMA01 - Ficha Teórica Clase 1. Mecanismos ArticuladosDocument18 pagesEMA01 - Ficha Teórica Clase 1. Mecanismos ArticuladosNaty FumagalliNo ratings yet
- Grados de LibertadDocument5 pagesGrados de LibertadRamiro Alfonzo GomezNo ratings yet
- Clasificación de Los Pares CinematicosDocument4 pagesClasificación de Los Pares Cinematicosjulian veraNo ratings yet
- Tarea 1.Document7 pagesTarea 1.Jesus Franco TorresNo ratings yet
- Tarea 1 U1Document3 pagesTarea 1 U1José Ramón TorresNo ratings yet
- Unidad Nº03 - Equilibrio de Los Cuerpos Vinculados-Chapas-2021Document18 pagesUnidad Nº03 - Equilibrio de Los Cuerpos Vinculados-Chapas-2021Juan ManuelNo ratings yet
- Grados e Libertad - Teoria Sesion 1 de 3Document5 pagesGrados e Libertad - Teoria Sesion 1 de 3Erick González LópezNo ratings yet
- C3 - Cap2 - Indeterminación CinemáticaDocument11 pagesC3 - Cap2 - Indeterminación CinemáticaRoberto Sotomayor MurilloNo ratings yet
- Elementos de Maquinas Grados de LibertadDocument5 pagesElementos de Maquinas Grados de LibertadING. Miguel Angel Sanchez MonzonNo ratings yet
- Cinematica de La VibracionDocument9 pagesCinematica de La Vibracionyamicarrizales100% (2)
- Problemas de Grado de LibertadDocument26 pagesProblemas de Grado de Libertadpaco ruizNo ratings yet
- LECCION3 ClasificacionDocument21 pagesLECCION3 ClasificacionbethsaidjprNo ratings yet
- Foro Sobre EstructurasDocument3 pagesForo Sobre Estructurasrebeca caldera romeroNo ratings yet
- Semana 01 - Conceptos Básicos Sobre Mecanismos y MáquinasDocument20 pagesSemana 01 - Conceptos Básicos Sobre Mecanismos y MáquinasLUIS LAURANo ratings yet
- Documentacion Sobre Proyecto de Silla de Ruedas Con Brazo RoboticoDocument28 pagesDocumentacion Sobre Proyecto de Silla de Ruedas Con Brazo RoboticoEri Sol SolNo ratings yet
- Momento FlectorDocument6 pagesMomento FlectorJosé Felix Centeno InfanteNo ratings yet
- Avello Teoria de Maquinas Edicion 2 Ene 2014 PDFDocument394 pagesAvello Teoria de Maquinas Edicion 2 Ene 2014 PDFGeorgy BotnarenkoNo ratings yet
- Mecanismo de Corredera PDFDocument40 pagesMecanismo de Corredera PDFYajis Eliz Chikit TkmNo ratings yet
- Manual Robótica UTN - 3. Caracteristicas y ComponentesDocument54 pagesManual Robótica UTN - 3. Caracteristicas y ComponenteslucasNo ratings yet
- 1.1 Grados de LibertadDocument4 pages1.1 Grados de LibertadLuis Ramon Ramon CanelaNo ratings yet
- Determinacion EstabilidadDocument1 pageDeterminacion EstabilidadCarmen FigueroaNo ratings yet
- 2017 Guía #06Document23 pages2017 Guía #06Nicolas BallesterNo ratings yet
- Grados de Libertad de MecanismosDocument4 pagesGrados de Libertad de MecanismosFernando HernandezNo ratings yet
- Capitulo 15.1Document7 pagesCapitulo 15.1giussepiNo ratings yet