Professional Documents
Culture Documents
Technique Sujet Technologie SC 2016
Uploaded by
Nadia Dridi0 ratings0% found this document useful (0 votes)
22 views15 pagesBAC TECHNIQUE
Original Title
Technique Sujet Technologie Sc 2016
Copyright
© © All Rights Reserved
Available Formats
PDF or read online from Scribd
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentBAC TECHNIQUE
Copyright:
© All Rights Reserved
Available Formats
Download as PDF or read online from Scribd
0 ratings0% found this document useful (0 votes)
22 views15 pagesTechnique Sujet Technologie SC 2016
Uploaded by
Nadia DridiBAC TECHNIQUE
Copyright:
© All Rights Reserved
Available Formats
Download as PDF or read online from Scribd
You are on page 1of 15
REPUBLIQUE TUNISIENNE preuve :_ TECHNOLOGIE
SSE cane “Section : Sciences Techni
EXAMEN DU BACCALAUREAT
SESSION 2016 Session de contréle
CONSTITUTION DU SUJET
- Un dossier technique pages : 1/7, 2/7, 3/7, 4/7, 5/7, 6/7 et 7/7.
- Un dossier réponses pages : 1/8, 2/8, 3/8, 4/8, 5/8, 6/8, 7/8 et 8/8.
TRAVAIL DEMANDE
A. Partie mécanique pages : 1/8, 2/8, 3/8 et 4/8. (10 points)
B. Partie électricité pages : 5/8, 6/8, 7/8 et 8/8. (10 points)
‘Observation : aucune documentation n'est autorisée ; l'utilisation de la calculatrice est permise. ‘J
Caméra mobile pour événements sportifs
|- Présentation
En athlétisme, 'événement qui attire l'attention d'un grand nombre de téléspectateurs est
épreuve du 100m masculin, notamment lors des jeux olympiques.
Afin de retransmettre par vidéo cet événement et d’assurer une meilleure qualité dimage, une
caméra mobile (fig.1) est fixee sur un chariot se dépiagant sur des rails parallélement a la piste
de course (fig.2).
Rails
Camera pivotante
Réducteur
de vitesse
Moteur Mi
Poulie (35)
(225 cm)
Fig.A
DOSSIER TECHNIQUE _| Caméra mobile pour événements sportifs page 1/7,
La caméra doit pouvoir
pivoter d'un angle de 25°
pour permettre de voir &
Tensemble des athiétes
au départ (fig.3) puis
suivre la course de odté eta
(fig.4). v
Angle initial de visée Angle final de visée
:
maa “1
=a
Il - Fonctionnement Fig.3 Fig.4
Le fonctionnement de la caméra mobile est décrit par le GRAFCET suivant :
1
Remettre a zéro le compteur |
Ordre de depart
a Translater le nH ee meee 3 H Filmer
chariot a droite ae pi Gniangio, Fevénement sportif
++ Fin de translation a droite in de pivotement a droite |. Fin de transiation a droite
[12 }Laretere chariot et fin de pivotement a
droite
>
+
a
Chariot a rarrét
r
r
Attendre
8
Attendre
Attendre
ds
Attendre pendant 5s
Temps écoulé
>
Pivoter la caméra
24 TF) a gauche d'un
Translater le
45 T1 chariot a gauche
angle de 25°
Fin de translation a gauche
+. Fin de pivotement gauche
Arréter le chariot
Chariot a rarrét
[Attendee Altendre
N.B : Pour des raisons de simplification du GRAFCET, le cas d'un faux départ des coureurs ne
fera pas l'objet de cette étude.
DOSSIER TECHNIQUE | Caméra mobile pour événements sportifs page 2/7
Ill - Tableau d’identification des actionneurs, des pré-actionneurs et des
capteurs =
‘Actions Actionneurs Pré-actionneurs | capteurs
Translaterle chariot droite _| Mi : Moteur courant continu
E : Electro-aimant
M; : Moteur a courant continu
it a Farret Eas
Transiater le chariot a gauche
Char
[droite | yy +
Pivoter la caméra |= Es Me: Moteur pas a pas
Filmer 'événement Caméra
Ordre de départ Ei
IV - Asservissement de la vitesse du chariot
Le chariot est entrainé par le moteur M; dont sa vitesse de rotation est asservie comme le
montre le schéma ci-dessous.
B : Féquivalent binaire a8
bits de vitesse du chariot.
Vitesse |CaPtow de vitesse} Compteur | A,|
(Rader Doppiee) |i! | modulo 256 Comparateur Moteur
' binaire | —»| Hacheur du chariot
: t B | te bits série Ms
Osciloteur + t
(G0 Kit) H
: Compteur | py, | Rous codeuse
A: Véquivalent binaire a8} modulo 256 fe le
bits de vitesse de lathiéte. | (Capteur de vitesse)
Asservissement de la vitesse du chariot
Les deux capteurs mesurent en permanence les vitesses de l'athléte et du chariot pour
pouvoir les comparer. Le résultat de la comparaison est utilisé pour agir sur la vitesse de
rotation du moteur My.
Un oscillateur non représenté délivre, en autonomie, un signa! rectangulaire. Le niveau haut
de ce signal permet la commande du radar Doppler. Le niveau bas permet I'arrét du radar et la
remise a zéro des deux compteurs.
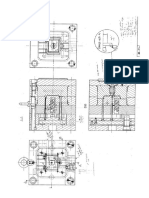
V- Description du mécanisme de déplacement de la caméra sur les rails
Le dessin d'ensemble (page 7/7 du dossier technique) représente le mécanisme qui permet
le déplacement de la caméra sur les rails.
Le déplacement de la caméra est assuré par le moteur électrique M; accouplé au réducteur
de vitesse (49, 11, 16, 25, 42) qui, a son tour, transmet le mouvement au renvoi d’angle
(26,26’). L'arbre de sortie (36) lié a la poulie (35) entraine le cable-courroie (38) auquel est
accroché le chariot porteur de la caméra provoquant ainsi son roulement sur les rails.
Le mouvement de rotation a la sortie du renvoi d’angle est transmis a la poulie (35) suivant
deux vitesses a sens inversés :
¥ Vitesse lente pour la phase de poursuite : la bobine (61), non excitée, libére le levier (56)
qui est alors attiré & droite par le ressort (60) provoquant ainsi le crabotage du baladeur (45,
46, 54) avec la roue (42).
Y Vitesse rapide pour la phase de retour (position du baladeur sur le dessin d'ensemble p. 7/7):
la bobine (61), excitée, attire le levier (56) @ gauche permettant le crabotage du baladeur
avec le pignon arbré (49).
DOSSIER TECHNIQUE _| Caméra mobile pour événements sportifs page 3/7
VI- Nomenclature
32 [Cales de réglage ls
31 | 74 _[Bague entretoise 63 | 1 |Coussinet a colleretie_
30 | 2 [Roulement a billes BC 62 | 2 [Tampon = |
29 | 4 [Arbre intermédiaire 61 | 1 [Bobine |
28 | 1 (Plaque 60 |_1 |Ressort de rappel |
27 | 2 [Clavette paralléle 59 | 1 |VisQ m4
26 | 2 |Pignon conique 58 | 1 |Ecrou hexagonal M6 |
25 | 1 [Pignonm=1.25 __Zo5=24 57 | 1 |Vis sans tate a téton long M6 |
24 | 4 [Arbre intermédiaire 56 | 1 [Levier |
23 | 1 [Vis a téte hexagonale M6 55 | 1 |Coussinet _ |
22 | 1 |Rondelle plate 54 | 4 |Coussinet
21 | 4 |Roulement a deux rangées debilies_| [53] 4 |Vis € téte hexagonale M8
20 | 1 [Anneau élastique pour alésage 52 | 4 |[Couvercle
19 | 3_|Clavette paralléle forme A 51 | 4 [oint a lévre
18 | 4 [Arbre intermédiaire 50 | 2 |Roulement a une rangée de billes BC
17 | 4 |Coussinet & collerette —_| [4911 [Pignon arbré m=1.25 — Zip=60
16 | 1 [Pignonm=1.25 — Z15=24 48 | 1 |Cage a aiguilles
15 | 1 [Corps 47 |_7_|Vis a tte cylindrique a six pans creux M6
44 | 2 |Bouchon 46 | 1 |Crabot
13 [1 |Bagueentretoise 45 | 4 |Crémailiére
12 |1 [Pied de positionnement 44 [4 [Axe
11 [1 |Roue dentée m=1.25 —Zu=... 43 [4 [Pignon
10 [4 |Carter 42 | 1 [Rove dentéem=125 Z=48
8 | 1 |Roulement 4 deux rangées de biles_| [41 | 1 |Ecrou a encoches
8 | 2 Plateau 40 | 4 |Rondelle frein
7 | 6 |Broche 39 | 2 _[Roulement a rouleaux coniques
6 [4 |Gaine en caoutchouc 38 |_1 |CAble-courroie
5 | 2 |Rondelle plate 37 \Vis @ téte hexagonale M10
4 | 2 |Visa téte cylindrique & six pans creux MS 36 | 1 [Arbre de sortie
3-|1 Arbre moteur 35 | 1 [Poulie D=250 mm
2 | 2 |Clavette paraliéie forme A 34 | 1 |Couvercie
1 _| 4 [Moteur électrique M; 33 | 1 Joint deux lavres
Rp [Nb Désignation [Rp [Nb Désignation
Vil - Caractéristiques du moteur d’entrainement du chariot M,
Le moteur utilisé est 4 courant continu a excitation indépendante du type LAK 2112MA de la
série FR 154 code 241-BB ayant les caractéristiques nominales suivantes :
Un = 500V ; Iy=13,4A ; Pun = SKW ; Tn = 70,9% ; Tuy = 29Nm ; ny = 1660tr/min.
La puissance d'excitation considérée comme pertes par effet joule inducteurs Pje= 420W.
DOSSIER TECHNIQUE
Caméra mobile pour événements sportifs
page 4/7
Vill - Schéma de principe du radar Doppler
Une carte électronique 4 base d'un radar Doppler délivre un signal de fréquence "Af"
proportionnelle 2 la vitesse de l'athlate affichée par un LCD.
Antenne 2 | Fréquence proportionnelie &
‘Signal de fréquence proportionnelle
Ba vitesse de Tathiete
IX - Circuit d’affichage de la vitesse de l’athléte
Laffichage de 'événement sportif et de la vitesse de |'athléte est réalisé par un afficheur LCD
commandé par un microcontrdleur du type PIC16F876A. La broche RAO/ANO est reliée a la
sortie du convertisseur fréquence/tension délivrant une tension proportionnelle a la vitesse de
rathiate.
got
‘Sous Olympiques 2016
Viton Atte om
388 23. noonsene
AA
3 z
g 3
i=
Fr Fréquence Tension i hs ee
3 3 mere ES
§ Sen
Exemples d’instructions spaciBcqine au mikroPascal Pro
Led_Out(1, 3, ‘Bonjour’ ; // Ecriture de «Bonjour» sur LCD a partir de la ligne 1, colonne 3
valeur_affichage : string[3]; // Chane de 3 caractéres
byteToStr(vitesse,valeur_affichage); // Conversion d'un octet « vitesse » en texte
adc_value:= ADC_Read(1); // Lecture sur le canal 1 aprés initialisation de la conversion
DOSSIER TECHNIQUE _| Caméra mobile pour événements sportifs page 5/7
X - Document constructeur des circuits intégrés utilisés
Brochage de C.1 74HC191 Brochage de C.1 7485
FP
TaRCTOT
Chronogramme de fonctionnement du C.1 74HC191
PL
ox UPL Lr Lr Lr Lp LL Lr i
-—
2 “ww oO 1 2 P+ 0 we 4 8
ta |} aor tae | cin sd “4
Table de fonctionnement du C.1 7485
—__
oo
eemzrrrereeree
DOSSIER TECHNIQUE _| Caméra mobile pour évenements sportifs page 6/7
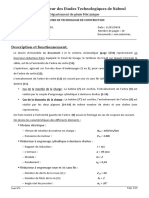
Systéme de commande
du baladeur
depp
‘1 See -
ally
‘ -.
poo
~
wee
e——
f i f
/ i) ff
/ 47/46/45
1/43/48
- CAMERA MOBILE POUR EVENEMENTS SPORTIFS :
(es
Ech 3:4 |
MECANISME DE TRANSMISSION | —
technique
A- PARTIE MECANIQUE
1- Etude fonctionnelle :
Létude se limite au mécanisme de transmission ; voir le dessin d’ensemble a la page (7/7)
du dossier technique.
4.1.Compléter la chaine cinématique assurant la transmission de mouvement du moteur (1)
la poulie (35) en indiquant le nom et le repere des composants manquants.
Ip |Pignon) lp
Bobine (61) non exatée
aaa Rae
PL ao
sa ‘Les
|>[Aecouplementil ch
Moteur
M1
Baladeur &
29
gauche
Bobine (61) excite Pole Sh aha oe
1.2. Etude technologique :
4.2.4. Donner le type d’accouplement {2, 3, 4, 5, 6, 7, 8}:
4.2.2. Donner le réle
Pea Di8 CS (14) |. oR oct eves ven ns say
-de la pigce (14)... 2...
1.2.3. Donner les noms et les repéres des
translation de la crémaillére (45).
assurant la mise et le maintien en position des assemblages proposés.
Mise en position Maintien en position
Assemblage du carter (10) aver |r 4. a,aaeaaha- Saa-esseamarn [op ->yaeeMie-nesnerAew-n-=
le comps (15)
‘Assemblage du moteur (1) avec
le carter (10)
4.4.Compléter le schéma cinématique ci-dessous selon la position indiquée par le dessin
d'ensemble. Pr ral Pa
gH
at
a a & 35
= We
4/ 46\ 29] >—~
Dossier réponses ‘Caméra mobile pour événements sportifs page 1/8 |
2- Etude du réducteur :
On donne le diamétre de la poulie (35), Das = 250mm.
Phase 4 : Vitesse rapide ; La vitesse de déplacement de la caméra V max = 20m/s.
2.1. Calculer la vitesse de rotation Nasmexi de la poulie (35)
2.2.En déduire la vitesse de rotation du moteur (1).
..trimn,
Phase 2 : Vitesse lente; La vitesse de déplacement de la caméra Vmini = 10m/s.
2.3. Calculer la vitesse de rotation Nssmini de la poulie (35).
. trfmin
2.4, Sachant que la vitesse de rotation du moteur (1) N;=1528 tr/mini, calculer le nombre de
dents de la roue (11).
3- Choix de matériaux de l’arbre de sortie (36) :
L’encombrement et la masse du mécanisme de transmission exigent que le diamétre de
Varbre (36) ne dépasse pas 16mm.
3.4.Sachant que l'arbre (36) transmet un couple maximal Cyai= 40Nm, déterminer la
contrainte tangentielle maximale Taxi due a sa torsion.
Dossier réponses ‘Caméra mobile pour événements sportifs page 2/8
3.2.Le constructeur doit choisir au moins un type d'acier du tableau ci-dessous qui vérifie les
deux conditions de daemau et Cmax avec un coefficient de sécurité s=!
3.2.1. Compléter sur le tableau la valeur de Rpg relative a chaque type d'acier, sachant
que Reg= + Rem
Acier Zi120Mi12 20MS ONCE 25CD4
Remini (N/mm?) 315 490 615 [ 785 |
[Reg (Nimm*) E l |
3.2.2, Citer le ou les types d’acier qui conviennent.
4- Cotation fonctionnelle :
4.1.Le montage du roulement (9) exige un Jeu latéral au niveau de sa bague extérieure.
Donner la position de ce jeu dans les cas ol :
= Aest mini
= Aest Maxi:
4,2. Tracer la chaine de cotes relative a la cote condition Amini.
Dossier réponses: ‘Caméra mobile pour événements sportifs page 3/8_)
5- Représentation graphique du couvercle (34) :
Se référer, dans cette partie, au dossier technique page (7/7).
5.1. Compléter la représentation du couvercle (34) a échelle du dessin par :
- la vue de face en coupe C-C sans détails cachés ;
- la vue de gauche.
5.2. Inscrire les tolérances des cotes fonctionnelles et les tolérances géométriques
nécessaires au bon fonctionnement du mécanisme.
Dossier réponses Caméra mobile pour événements sportifs page 4/8,
- PARTIE ELECTRICITE
4 - Synchronisation des différentes taches
En se référant aux pages 2/7 et 3/7 du dossier technique, compléter les grafcets d'un point
vue partie commande des différentes taches.
Grafcet de coordination T&che 1 : translater chariot Tache 2 : pivoter caméra
omi-e |
Tache 3 : filmer
2- Etude du moteur M; au
Le moteur M1, dont les caractéristiques nominales sont indiquées a la page 4/7 du dossier
technique, développe un couple utile Tur = 20Nm a une vitesse de rotation ne = 1528tr/min au
point de fonctionnement Pr.
2-1- Déterminer, pour le point de fonctionnement Pr, la puissance utile Pur.
2- 2- Le courant absorbé Ir = 9,52A et le rendement 1)
fonctionnement "Pe" :
a- la puissance totale absorbée par le moteur Par.
38%. Déterminer pour le point de
b- la tension Ur a appliquer aux bornes de linduit du moteur.
Dossier réponses _
_[___Gaméra mobile pour événements sportifs _ [page 5/8]
3- Etude du hacheur série
La variation de la vitesse du moteur M1 est assurée
par un hacheur série dont le schéma est ci-contre.
3-1- La tension d’alimentation Un du hacheur est égale a
BOOV. Déterminer le rapport cyclique “a” pour que la valeur
moyenne de la tension aux bores de linduit soit égale a
SOV (UFmoy= 450V).
3-2- En tenant compte de la valeur du
rapport cyclique trouvé en 3-1,
représenter, & échelle, le graphe de la
tension ur(t) sur le repére ci-contre. "
4 - Etude du circuit de commande du hacheur
Se référer, dans cette partie, a la page 6/7 du dossier technique.
4--1- Donner l'état logique de lentrée PL et la combinaison des entrées de préchargement
permettant la remise a zéro du circuit intégré 74191.
PL= DoD:D2D3 =
Compléter le schéma du circuit de commande du hacheur :
a- en mettant en cascade les deux circuits intégrés de chaque compteur ;
b- en reliant les entrées de préchargement "DuD1D2Ds" au niveau logique correspondant ;
c- en reliant ies entrées "AB” du comparateur au niveau logique correspondant.
Comptourt Comparatour 16 bits
‘rrrerzees:
Captour de vitesse de Vathiéte
Hieesennz
Captour do vitesse du charfot
Oscillator 1
no
7 __Compteur2
‘Dossier réponses ‘Caméra mobile pour événements sportifs page 6s _|
5.
Etude de la programmation du microcontréleur
En se référant au schéma structurel du circuit d'affichage de la vitesse de l'athléte @ la page
5/7 du dossier technique, compléter ci-dessous le programme en langage mikroPascal Pro
conformément aux commentaires donnés. Les broches non utilisées sont considérées comme
des entrées.
Programmation en langage Mikropascal
Commentaires
| program Affichage;
var
var_conversion: word;
172 octets car le résultat de conversion est
sur 10 bits
var_calcul:real;
WNariable du type réel
vitesse:byte;
771 octet car la vitesse réelle ne dépasse
pas 15m/s
vitesse_affichee:............
| 1/ Connections de 'LCD
1 Chaine de 3 caractéres pour afficher la
vitesse _
var LCD_RS:sbit at PORTB.O;
var LCD_EN:sbit at PORTB.1;
var LCD_Dé:sbit at PORTB.2;
bit at PORTB.3;
bit at PORTB.4;
var LCD_D7:sbit at PORTB.5;
var LCD_RS_Direction:sbit at TRISB.0;
var LCD_EN_Direction:sbit at TRISB.1;
var LCD_D4_Direction:sbit at TRISB.2;
var LCD_D5_Direction:sbit at TRISB.3;
|__var LCD_D6_Direction:sbit at TRISB.4;
[— var LCD_D7_Direction:sbit at TRISB.5;
[begin
| adcon':=%10001110;
I Choix de RAO/ANO en tant qu’entrée
analogique
(Fade initd; initialisation du module CAN
[LeD_inito: 7 initialisation de LCD.
|-LcD“CMD(LCD_CURSOR_OFF); 1/Désactivation du curseur de TLCD
while true do
_begin
var_conversion: :
T Lecture de la valeur fournie par le CAN
sur le canal 0
var_calcul:=(var_conversion* 30)/1023;
1 Calcul de la vitesse
vitesse:=byte(var_calcul);
1 Transformation de la vitesse en octet
(vitesse vitesse_affichee);
1 Conversion de la vitesse en texte
.,'eux Olympiques 2016");
Vitesse Athlete’);
TTAffchage du texte & partir de la ignet et
colonne2 |
| 1 Affichage du texte & partir de la ligne? et |
| colonnet
(2,24...
11 Affichage de la valeur de la vitesse
T/Affichage de Tunité de la vitesse (1m/S) &
partir de la ligne 2 et la colonne 28
(Dossier reponses
7)
§- Etude de l'oscillateur 1
Loscillateur 1, utilisé dans la carte
d'asservissement de Ia vitesse du chariot (page 3 /7
du dossier technique), est un circuit multivibrateur
astable 4 base d'amplificateur linéaire intégré. Ce
demier est supposé parfait et polarisé par une
alimentation symétrique +9V. ve
5-1: Exprimer la relation Ve* = f(Vs, Rs, Re). ka ‘KO
5-2 : Déduire les expressions des tensions seuils "Vi et Vi" de la tension Ver en fonction de
Ri, Rz et la tension de saturation "Vsa" dans les deux cas suivants
a- SiVd>0=>.
b- SiVd
5-3 : Déterminer les valeurs de Vi et Vi si #Veat = +9V.
5-4 : expression de la période du signal de sortie est T= 2.P.C.n(1 + 2. Rt),
Déterminer alors la valeur de la résistance "P" a choisir pour que la fréquence du signal de
sortie soit égale a 50KHz (f = SOKHz).
5.5 : Représenter, a échelle, allure du signal de sortie sachant que le condensateur est
initialement déchargé.
(Dossier réponses: ‘Caméra mobile pour événements sportifs - page 6/6
You might also like
- Plan de MouleDocument1 pagePlan de MouleNadia DridiNo ratings yet
- Pompe A Pistons Axiaux PDFDocument8 pagesPompe A Pistons Axiaux PDFNadia DridiNo ratings yet
- Calcul Des Boulons Au CisaillementDocument2 pagesCalcul Des Boulons Au CisaillementNadia DridiNo ratings yet
- Designation Materiaux v4Document6 pagesDesignation Materiaux v4Hatem LaajiliNo ratings yet
- Pompe A Pistons Axiaux PDFDocument8 pagesPompe A Pistons Axiaux PDFNadia DridiNo ratings yet
- m14 Sensibilisation A La Qualite Ge EsaDocument75 pagesm14 Sensibilisation A La Qualite Ge EsaNadia DridiNo ratings yet
- Tap PDFDocument248 pagesTap PDFNadia DridiNo ratings yet
- Chapitre.3 Partie.1Document38 pagesChapitre.3 Partie.1Nadia DridiNo ratings yet
- Examen 2013Document4 pagesExamen 2013Brahim MouhcineNo ratings yet
- C 04-02 PDFDocument8 pagesC 04-02 PDFkharrat samirNo ratings yet
- Metrologie de BaseDocument8 pagesMetrologie de BaseA. samir86% (7)
- Position Protection Animale ChasseDocument9 pagesPosition Protection Animale ChasseNadia DridiNo ratings yet
- Corrige D Examen MNT PRV 4fDocument3 pagesCorrige D Examen MNT PRV 4fNasserNo ratings yet
- Accoudoirv 5Document46 pagesAccoudoirv 5Nadia DridiNo ratings yet
- Caracteristiques Des HuilesDocument9 pagesCaracteristiques Des Huilessl1962100% (1)
- Démontage Remontage - Maintenance Moteur PDFDocument5 pagesDémontage Remontage - Maintenance Moteur PDFMayor Nfmn100% (2)
- Operations Geometriques 2DDocument12 pagesOperations Geometriques 2DNadia DridiNo ratings yet
- Sujet 1 PDFDocument10 pagesSujet 1 PDFLarbi ElbakkaliNo ratings yet
- EffetgyroscopiqueDocument22 pagesEffetgyroscopiqueNadia DridiNo ratings yet
- Empreintesv 6Document17 pagesEmpreintesv 6amrNo ratings yet
- Automobile 1 V 2Document41 pagesAutomobile 1 V 2Nadia DridiNo ratings yet
- Vocabulaire Moule DinjectionDocument1 pageVocabulaire Moule DinjectionMouradBenSedrineNo ratings yet
- Torsion Act (Banc D'essai)Document4 pagesTorsion Act (Banc D'essai)Nadia DridiNo ratings yet
- Vocabulaire Moule DinjectionDocument1 pageVocabulaire Moule DinjectionMouradBenSedrineNo ratings yet
- Moule D'injectionDocument3 pagesMoule D'injectionNadia DridiNo ratings yet
- Carte de L'europe À ImprimerDocument1 pageCarte de L'europe À ImprimerNadia DridiNo ratings yet
- Caractéristiques Équivalentes D'inertie de Mécanismes CourantsDocument2 pagesCaractéristiques Équivalentes D'inertie de Mécanismes CourantsNadia DridiNo ratings yet
- Caractéristiques Équivalentes D'inertie de Mécanismes CourantsDocument2 pagesCaractéristiques Équivalentes D'inertie de Mécanismes CourantsNadia DridiNo ratings yet
- Implementation D Un Modele de ComportemeDocument3 pagesImplementation D Un Modele de ComportemeNadia DridiNo ratings yet