You might also like
- Influence of Tensioner Dry Friction On The Vibration of Belt Drives With Belt Bending Stiffness PDFDocument9 pagesInfluence of Tensioner Dry Friction On The Vibration of Belt Drives With Belt Bending Stiffness PDFjeyaselvanmNo ratings yet
- Dynamic Modelling of Belt Drives PDFDocument76 pagesDynamic Modelling of Belt Drives PDFjeyaselvanmNo ratings yet
- SIAT - First Announcement 2021 - Final PDFDocument4 pagesSIAT - First Announcement 2021 - Final PDFjeyaselvanmNo ratings yet
- SIAT - First Announcement 2021 - Final PDFDocument4 pagesSIAT - First Announcement 2021 - Final PDFjeyaselvanmNo ratings yet
- Belt Study1 PDFDocument6 pagesBelt Study1 PDFjvaldebe82No ratings yet
- Four-Fold Method of Noise and Vibration ControlDocument8 pagesFour-Fold Method of Noise and Vibration ControlasdmoomNo ratings yet
- A SHORT TERM COURSE ON ADVANCES IN VIBRATION ENGINEERINGDocument2 pagesA SHORT TERM COURSE ON ADVANCES IN VIBRATION ENGINEERINGjeyaselvanmNo ratings yet
- Influence of Tensioner Dry Friction On The Vibration of Belt Drives With Belt Bending Stiffness PDFDocument9 pagesInfluence of Tensioner Dry Friction On The Vibration of Belt Drives With Belt Bending Stiffness PDFjeyaselvanmNo ratings yet
- 3-day introductory course on acoustic engineering in Pune, IndiaDocument1 page3-day introductory course on acoustic engineering in Pune, IndiajeyaselvanmNo ratings yet
- Applications of Triaxial AccelerometersDocument14 pagesApplications of Triaxial AccelerometersjeyaselvanmNo ratings yet
- One-Dimensional Flows of Fluid and Gas in PipelinesDocument30 pagesOne-Dimensional Flows of Fluid and Gas in PipelinesjeyaselvanmNo ratings yet
- Digital Audio - Creating A WAV (RIFF) FileDocument3 pagesDigital Audio - Creating A WAV (RIFF) FilejeyaselvanmNo ratings yet
- Aircraft Interior Acoustics BasicsDocument12 pagesAircraft Interior Acoustics BasicsjeyaselvanmNo ratings yet
- TVC Input Data Form Page 7Document17 pagesTVC Input Data Form Page 7jeyaselvanmNo ratings yet
- V Belt FailureDocument10 pagesV Belt Failuremuki10No ratings yet
- Changing CoordinatesDocument13 pagesChanging CoordinatesjeyaselvanmNo ratings yet
- The Story of Allan D. Pierce Jerry H. GinsbergDocument7 pagesThe Story of Allan D. Pierce Jerry H. GinsbergjeyaselvanmNo ratings yet
- The Story of Allan D. Pierce Jerry H. GinsbergDocument7 pagesThe Story of Allan D. Pierce Jerry H. GinsbergjeyaselvanmNo ratings yet
- Arku LevelingDocument20 pagesArku Levelingjeyaselvanm0% (1)
- A Model For Analyzing The Startup Dynamics of A Belt-Transmission Driven by A DC MotorDocument6 pagesA Model For Analyzing The Startup Dynamics of A Belt-Transmission Driven by A DC MotorjeyaselvanmNo ratings yet
- Helling Katalog NDTDocument43 pagesHelling Katalog NDTjeyaselvanmNo ratings yet
- Top 8 Vibration Analysis Software PackagesDocument7 pagesTop 8 Vibration Analysis Software PackagesjeyaselvanmNo ratings yet
- State-Space Representation of A Plant Plant With State-Variable FeedbackDocument1 pageState-Space Representation of A Plant Plant With State-Variable FeedbackjeyaselvanmNo ratings yet
- 950 3-3 P5ZR 30 Pag 650-100Document8 pages950 3-3 P5ZR 30 Pag 650-100jeyaselvanmNo ratings yet
- Understanding Noise Radiation From A Hermetic CompressorDocument6 pagesUnderstanding Noise Radiation From A Hermetic CompressorjeyaselvanmNo ratings yet
- Pipeline NetworksDocument15 pagesPipeline NetworksjeyaselvanmNo ratings yet
- Suppression PassiveDocument2 pagesSuppression PassivejeyaselvanmNo ratings yet
- Smartphone SensorsDocument14 pagesSmartphone SensorsjeyaselvanmNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Classification of Rotary PumpsDocument3 pagesClassification of Rotary Pumpsapi-26349602100% (2)
- PARKER PS1-E11 Technical Datasheet PDFDocument1 pagePARKER PS1-E11 Technical Datasheet PDFCardoso MalacaoNo ratings yet
- Abs VSCDocument15 pagesAbs VSCDayro GeneyNo ratings yet
- Full bore brass ball valveDocument1 pageFull bore brass ball valveMF CHOONGNo ratings yet
- Gate ValveDocument222 pagesGate ValveMetoo ChyNo ratings yet
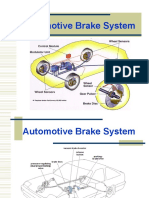
- Automotive Brake SystemDocument39 pagesAutomotive Brake Systemjubaer ahmed50% (4)
- Kinematics of Machinery Anna University Question Papers CompiledDocument77 pagesKinematics of Machinery Anna University Question Papers CompiledNatesha SundharanNo ratings yet
- Technical data on dimension tolerances for fittingsDocument1 pageTechnical data on dimension tolerances for fittingsHien Bui XuanNo ratings yet
- FWD 6 Speed: Ganzeboom Transmission Parts & Torque ConvertersDocument2 pagesFWD 6 Speed: Ganzeboom Transmission Parts & Torque ConvertersAlli YantiNo ratings yet
- T12000 Series: MODEL NO. - Part NoDocument29 pagesT12000 Series: MODEL NO. - Part Nocesar100% (1)
- Baelz 373-E07 Electric ActuatorDocument3 pagesBaelz 373-E07 Electric ActuatorAbdulSattarNo ratings yet
- Optra Solenoid PDFDocument16 pagesOptra Solenoid PDFjosue100% (3)
- ME8694 Hydraulics and Pneumatics MCQDocument19 pagesME8694 Hydraulics and Pneumatics MCQaNo ratings yet
- 272c HidraulioDocument4 pages272c Hidraulioarmando vara chavez100% (1)
- Undercarriage: Hydraulic System 6060 BH Hydraulic Mining ShovelDocument6 pagesUndercarriage: Hydraulic System 6060 BH Hydraulic Mining Shoveladriano smithNo ratings yet
- Heavy Construction Equipment Seal SolutionsDocument69 pagesHeavy Construction Equipment Seal SolutionsSaif0% (1)
- Catalogo Bucyrus 295bii y Stock FiltrosDocument57 pagesCatalogo Bucyrus 295bii y Stock Filtrosjaime_perez_lopezNo ratings yet
- Train epicycloid calcul torque gear teethDocument3 pagesTrain epicycloid calcul torque gear teethmohammedNo ratings yet
- 330B Excavators Hydraulic Systems: 3YR1-UP 5LR1-UP 4RS1-UP 5LS1-UPDocument2 pages330B Excavators Hydraulic Systems: 3YR1-UP 5LR1-UP 4RS1-UP 5LS1-UPJim LiebNo ratings yet
- F21 Hyundai Vera CruzDocument338 pagesF21 Hyundai Vera CruzMiguel ApazaNo ratings yet
- th103 HydrDocument2 pagesth103 Hydrvic13rNo ratings yet
- Fail Position PDFDocument4 pagesFail Position PDFSergio IvánNo ratings yet
- Everything You Need to Know About Centrifugal PumpsDocument27 pagesEverything You Need to Know About Centrifugal PumpsNischal LgNo ratings yet
- 793D SERV1817-01 - SLIDE - Aug2006Document233 pages793D SERV1817-01 - SLIDE - Aug2006Ishan IqbalNo ratings yet
- Manual HandgludsDocument11 pagesManual HandgludsBruno Peterson de PauliNo ratings yet
- 0310-Vsa-0020 0310-Vsa-0023 0310-Vsa-0021 0310-Vsa-0022: 3/4"-0310-Ho-01601-Spe0qDocument1 page0310-Vsa-0020 0310-Vsa-0023 0310-Vsa-0021 0310-Vsa-0022: 3/4"-0310-Ho-01601-Spe0qnestor159357No ratings yet
- 008 Cat-6060 Attachment Functions FSDocument37 pages008 Cat-6060 Attachment Functions FSenrico100% (3)
- Maintenance Manual of LHB Coaches Air Brake SystemDocument4 pagesMaintenance Manual of LHB Coaches Air Brake SystemLove TodkarNo ratings yet
- d8r II Serp3245 AkaDocument0 pagesd8r II Serp3245 Akamacross13100% (4)
- PumpsDocument1 pagePumpsDexter ContaweNo ratings yet