You might also like
- One-Cycle-Controlled Bidirectional AC-to-DC Converter With Constant Power FactorDocument12 pagesOne-Cycle-Controlled Bidirectional AC-to-DC Converter With Constant Power FactorKrishna ReddyNo ratings yet
- A Novel ZVS Bidirectional DC-DC Converter For Fuel Cell ApplicationsDocument4 pagesA Novel ZVS Bidirectional DC-DC Converter For Fuel Cell ApplicationsS B RajNo ratings yet
- Design and Implementation of Three Level DC-DC Multiplier Boost Converter With Resonant SwitchingDocument10 pagesDesign and Implementation of Three Level DC-DC Multiplier Boost Converter With Resonant SwitchingRaja RJNo ratings yet
- 9 271Document11 pages9 271Алексей ЯмаNo ratings yet
- Digital Simulation of ZVS DC To DC Converter Using Simulink: Research Scholar Sathyabama University Chennai, IndiaDocument13 pagesDigital Simulation of ZVS DC To DC Converter Using Simulink: Research Scholar Sathyabama University Chennai, Indiaaamirhussain_001No ratings yet
- Cuk Converter State SpaceDocument5 pagesCuk Converter State SpaceEdu Daryl MacerenNo ratings yet
- Zeta Converter PDFDocument7 pagesZeta Converter PDFSreeram PanigrahiNo ratings yet
- Digital Simulation of ZVS DC To DC Converter Using Simulink: AbstractDocument13 pagesDigital Simulation of ZVS DC To DC Converter Using Simulink: AbstractAshok KumarNo ratings yet
- Modulation Strategies For Three-Phase AC-DC Matrix Converters A ComparisonDocument7 pagesModulation Strategies For Three-Phase AC-DC Matrix Converters A ComparisonSudip MondalNo ratings yet
- Conference-201410-Shahzad-LLC Series Resonant Converter With PID Controller For Battery Charging ApplicationDocument6 pagesConference-201410-Shahzad-LLC Series Resonant Converter With PID Controller For Battery Charging ApplicationTocean DuongNo ratings yet
- Resonant DC Link in PWM AC ChopperDocument5 pagesResonant DC Link in PWM AC ChopperMukesh SharmaNo ratings yet
- Synchronous Rectification With Flyback and Forward ConvertersDocument26 pagesSynchronous Rectification With Flyback and Forward ConverterszwolfNo ratings yet
- Design and Implementation of A High Dimming Ratio LED Drive ControllerDocument6 pagesDesign and Implementation of A High Dimming Ratio LED Drive ControllerBlai VsNo ratings yet
- Design and Control of A Bi-Directional Resonant DC-DC Converter For Automotive Engine/Battery Hybrid Power GeneratorsDocument7 pagesDesign and Control of A Bi-Directional Resonant DC-DC Converter For Automotive Engine/Battery Hybrid Power GeneratorsIfan Seven SeasNo ratings yet
- 04 23 98 Critical Mode Control Stabilizes Switch Mode Power SuppliesDocument3 pages04 23 98 Critical Mode Control Stabilizes Switch Mode Power Suppliestinix84No ratings yet
- Isolated Bridgeless ConverterDocument9 pagesIsolated Bridgeless ConverterAnkit MishraNo ratings yet
- Carrier Based Sinusodial PWM Scheme For The Nine Switch ConverterDocument6 pagesCarrier Based Sinusodial PWM Scheme For The Nine Switch ConverterShankar MukalNo ratings yet
- Synchronous RectificationDocument64 pagesSynchronous Rectificationramkrsingh1384No ratings yet
- Ieee Current ModeDocument7 pagesIeee Current ModepqqpNo ratings yet
- A New Single Switch Buck-Boost Type DC-DC ConverterDocument4 pagesA New Single Switch Buck-Boost Type DC-DC ConverterRaveendhra IitrNo ratings yet
- Common-Mode Voltage Reduction For Regenerative AC DrivesDocument8 pagesCommon-Mode Voltage Reduction For Regenerative AC DrivesDao DaoNo ratings yet
- Lin 2013Document12 pagesLin 2013Pavan Singh TomarNo ratings yet
- A Novel Analysis of ZeroDocument9 pagesA Novel Analysis of ZerodineshpeterNo ratings yet
- BuckConverter Design Jpe10Document13 pagesBuckConverter Design Jpe10joviflocasNo ratings yet
- Abracon DC DC Converters and The Importance of DCR Optimized InductorsDocument21 pagesAbracon DC DC Converters and The Importance of DCR Optimized InductorsZouhairBellaouiNo ratings yet
- Application Note AN-1160: Design of Resonant Half-Bridge Converter Using IRS2795 (1,2) Control ICDocument32 pagesApplication Note AN-1160: Design of Resonant Half-Bridge Converter Using IRS2795 (1,2) Control ICcumshotNo ratings yet
- 11 - AC and DC Equivalent Circuit Modeling of The Discontinuous Conduction ModeDocument29 pages11 - AC and DC Equivalent Circuit Modeling of The Discontinuous Conduction ModeThanh LeNo ratings yet
- Feasible Performance Evaluations of 3-Level 3-Phase Voltage Source Soft-Switching Inverter Using IGBT ModulesDocument6 pagesFeasible Performance Evaluations of 3-Level 3-Phase Voltage Source Soft-Switching Inverter Using IGBT ModulesharoutuonNo ratings yet
- Matlab Simulation of A High Step-Up DC-DC Converter For A Micro Grid ApplicationDocument10 pagesMatlab Simulation of A High Step-Up DC-DC Converter For A Micro Grid ApplicationANAMIKA DASNo ratings yet
- Energies 13 06631 v2Document16 pagesEnergies 13 06631 v2Crisha De Guzman PunzalanNo ratings yet
- A Fixed Frequency Dual-Mode DC-DC Buck Converter With Fast-Transient Response and High Efficiency Over A Wide Load RangeDocument6 pagesA Fixed Frequency Dual-Mode DC-DC Buck Converter With Fast-Transient Response and High Efficiency Over A Wide Load RangeskrtamilNo ratings yet
- Overlap 9Document5 pagesOverlap 9padmasiri1No ratings yet
- Performance Comparison of Continuous Conduction Mode (CCM)Document5 pagesPerformance Comparison of Continuous Conduction Mode (CCM)harshalvikasNo ratings yet
- Design and Implementation of Parallel Connected DC-DC Buck ConvertersDocument6 pagesDesign and Implementation of Parallel Connected DC-DC Buck ConvertersIJARTETNo ratings yet
- Implementation of Single Stage Three Level Power Factor Correction AC-DC Converter With Phase Shift ModulationDocument6 pagesImplementation of Single Stage Three Level Power Factor Correction AC-DC Converter With Phase Shift ModulationseventhsensegroupNo ratings yet
- Design A Single Phase Inverter With A LCL Filter: AbstractDocument4 pagesDesign A Single Phase Inverter With A LCL Filter: AbstractPham Viet QuanNo ratings yet
- PV MPPT With Inductor PDFDocument7 pagesPV MPPT With Inductor PDFrajanNo ratings yet
- Enumeration-Based Predictive Control For Buck DC-DC ConverterDocument5 pagesEnumeration-Based Predictive Control For Buck DC-DC ConverterKannan KochumonNo ratings yet
- Family Controller PFCDocument8 pagesFamily Controller PFCWesley de PaulaNo ratings yet
- Presentation Paper On DGDocument5 pagesPresentation Paper On DGAlok Bikash SadangiNo ratings yet
- Snubber FlybackDocument5 pagesSnubber Flybackandrevaz91No ratings yet
- Statespace Model FWD ConverterDocument4 pagesStatespace Model FWD ConverterrogerozNo ratings yet
- Topic Assignment12Document6 pagesTopic Assignment12cuongakamarineNo ratings yet
- Non-Isolated Bidirectional Zero-Voltage Switching DC-DC Converter by Gopal PrasadDocument7 pagesNon-Isolated Bidirectional Zero-Voltage Switching DC-DC Converter by Gopal PrasadGopal Prasad BansalNo ratings yet
- 9 - Modelling of A ZVS Full Bridge DC-DC Converter For Photovoltaic ApplicationsDocument6 pages9 - Modelling of A ZVS Full Bridge DC-DC Converter For Photovoltaic ApplicationsSouhail BarakatNo ratings yet
- Ic Ldo CasfvfDocument10 pagesIc Ldo CasfvfLuis MuñozNo ratings yet
- Conference-201310-Kerim Colak-Dual Closed Loop Control of LLC Resonant Converter For EV Battery ChargerDocument5 pagesConference-201310-Kerim Colak-Dual Closed Loop Control of LLC Resonant Converter For EV Battery ChargerTocean DuongNo ratings yet
- Small-Signal Analysis A DC-DC Converter With A Non-Symmetric Phase Integral-Lead ControllerDocument8 pagesSmall-Signal Analysis A DC-DC Converter With A Non-Symmetric Phase Integral-Lead ControllerVinhNo ratings yet
- An Experimental Prototype of Buck Converter Fed Series DC Motor Implementing Speed and Current ControlsDocument4 pagesAn Experimental Prototype of Buck Converter Fed Series DC Motor Implementing Speed and Current ControlsdevchandarNo ratings yet
- Chap05 PDFDocument24 pagesChap05 PDFlighthouse2510No ratings yet
- Research Paper A Novel Method For Near State Pulse Width Modulation (NSPWM) Based Chopper DrivesDocument4 pagesResearch Paper A Novel Method For Near State Pulse Width Modulation (NSPWM) Based Chopper Drivesdivyamanikandan007No ratings yet
- A New ZVZCS Isolated Dual Series Resonant DC-DCDocument9 pagesA New ZVZCS Isolated Dual Series Resonant DC-DCFelipe Martins GuimarãesNo ratings yet
- Analysis of Buck Converter and Simulating It For Different Switching Frequencies and Different Power DevicesDocument6 pagesAnalysis of Buck Converter and Simulating It For Different Switching Frequencies and Different Power DevicesPrema Vinod PatilNo ratings yet
- Implementation of ZVS-ZCS Combined Snubber NetworkDocument6 pagesImplementation of ZVS-ZCS Combined Snubber NetworkYuiophjklNo ratings yet
- Analysis Vienna RectifierDocument8 pagesAnalysis Vienna RectifierJose Luis RomeroNo ratings yet
- Design and Implementation of A PI-MPPT Based Buck-Boost ConverterDocument6 pagesDesign and Implementation of A PI-MPPT Based Buck-Boost ConverterLatifa OuchallaNo ratings yet
- Design and Implementation of A PI-MPPT Based Buck-Boost ConverterDocument6 pagesDesign and Implementation of A PI-MPPT Based Buck-Boost ConverterWesley de PaulaNo ratings yet
- QUT Digital Repository:: Conference (IPEC 2007), Pages Pp. 661-665, SingaporeDocument6 pagesQUT Digital Repository:: Conference (IPEC 2007), Pages Pp. 661-665, SingaporeSheetal VermaNo ratings yet
- Lecture 36Document18 pagesLecture 36Pavan Singh TomarNo ratings yet
- 19.2.3 Parallel Resonant DC-DC Converter: Fundamentals of Power Electronics Chapter 19: Resonant ConversionDocument21 pages19.2.3 Parallel Resonant DC-DC Converter: Fundamentals of Power Electronics Chapter 19: Resonant ConversionPavan Singh TomarNo ratings yet
- How To Install PSIM PDFDocument5 pagesHow To Install PSIM PDFPavan Singh TomarNo ratings yet
- TN 2251Document34 pagesTN 2251Pavan Singh TomarNo ratings yet
- W12 SlidesDocument35 pagesW12 SlidesPavan Singh Tomar0% (1)
- Attendance For State of Art: Pavan Singh Tomar (2017REE9503) S.No. Name Registration ID SignatureDocument1 pageAttendance For State of Art: Pavan Singh Tomar (2017REE9503) S.No. Name Registration ID SignaturePavan Singh TomarNo ratings yet
- Notification Delhi Development Authority Asst Executive Engineer PostsDocument3 pagesNotification Delhi Development Authority Asst Executive Engineer PostsPavan Singh TomarNo ratings yet
- Summer Internship Program On Design, Modelling & Implementation of Power Electronic Circuit For Harnessing Renewable Energy SourcesDocument1 pageSummer Internship Program On Design, Modelling & Implementation of Power Electronic Circuit For Harnessing Renewable Energy SourcesPavan Singh TomarNo ratings yet
- Summer Internship Program On Design, Modelling & Implementation of Power Electronic Circuit For Harnessing Renewable Energy SourcesDocument6 pagesSummer Internship Program On Design, Modelling & Implementation of Power Electronic Circuit For Harnessing Renewable Energy SourcesPavan Singh TomarNo ratings yet
- Design of AC-DC Grid Connected Converter Using Multi-Objective OptimizationDocument9 pagesDesign of AC-DC Grid Connected Converter Using Multi-Objective OptimizationPavan Singh TomarNo ratings yet
- Tax Point Date Description Tax Amount Net Amount: Sgst/UtgstDocument1 pageTax Point Date Description Tax Amount Net Amount: Sgst/UtgstPavan Singh TomarNo ratings yet
- Malaviya National Institute of Technology: AcknowledgementDocument1 pageMalaviya National Institute of Technology: AcknowledgementPavan Singh TomarNo ratings yet
- Irctcs E Ticketing Service Electronic Reservation Slip (Personal User)Document1 pageIrctcs E Ticketing Service Electronic Reservation Slip (Personal User)Pavan Singh TomarNo ratings yet
- A Matter of FACTS - Final 160209Document98 pagesA Matter of FACTS - Final 160209Pavan Singh TomarNo ratings yet
- A Passive Auxiliary Circuit Achieves Zero-Voltage-Switching in Full-Bridge Converter Over Entire Conversion RangeDocument3 pagesA Passive Auxiliary Circuit Achieves Zero-Voltage-Switching in Full-Bridge Converter Over Entire Conversion RangePavan Singh TomarNo ratings yet
- Lin 2013Document12 pagesLin 2013Pavan Singh TomarNo ratings yet
- Transfer Functions and Frequency Response: Review Questions!Document47 pagesTransfer Functions and Frequency Response: Review Questions!Pavan Singh TomarNo ratings yet
- Shreyash Retail Private Limited,: Grand TotalDocument2 pagesShreyash Retail Private Limited,: Grand TotalPavan Singh TomarNo ratings yet
- Address:-H.O. Dayal Nagar, Mirjapur, Gangapur City, Rajasthan 322201 CONTACT NO.: - 9887707065Document1 pageAddress:-H.O. Dayal Nagar, Mirjapur, Gangapur City, Rajasthan 322201 CONTACT NO.: - 9887707065Pavan Singh TomarNo ratings yet
- TEACHER'S WEEKLY PERFORMANCE REPORT (Week .. .. .To .. .)Document12 pagesTEACHER'S WEEKLY PERFORMANCE REPORT (Week .. .. .To .. .)Pavan Singh TomarNo ratings yet
- 2 Basics DSP AV Z Filters NoiseDocument31 pages2 Basics DSP AV Z Filters NoisevignanarajNo ratings yet
- Hfe Pioneer pdr-555rw ServiceDocument72 pagesHfe Pioneer pdr-555rw ServiceYannisNo ratings yet
- 12 Iostat Examples For Solaris Performance TroubleshootingDocument5 pages12 Iostat Examples For Solaris Performance Troubleshootingshekhar785424No ratings yet
- Experiment No.03: Implementation of Dipole Antenna Using CST Microwave Studio. Objectives: Equipment RequiredDocument9 pagesExperiment No.03: Implementation of Dipole Antenna Using CST Microwave Studio. Objectives: Equipment RequiredM. Ahmad RazaNo ratings yet
- Performance Evaluation of Fixed-Point Array Multipliers On Xilinx FpgasDocument5 pagesPerformance Evaluation of Fixed-Point Array Multipliers On Xilinx FpgasMeghanand KumarNo ratings yet
- MX2 Training Program 13 Multiprobe InspectionDocument8 pagesMX2 Training Program 13 Multiprobe InspectionVictor Antonio Diaz FaundezNo ratings yet
- CETa CompsDocument9 pagesCETa CompsDelta VisionNo ratings yet
- QPF4001 Data SheetDocument21 pagesQPF4001 Data SheetNhat Tran XuanNo ratings yet
- 9200002-QR-T-UNIT SD02 RF Version B08Document8 pages9200002-QR-T-UNIT SD02 RF Version B08Cristian RodriguezNo ratings yet
- FescoDocument9 pagesFescoAmeen UllahNo ratings yet
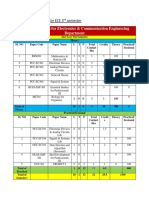
- Syllabus For 3rd SemDocument26 pagesSyllabus For 3rd SemSubhraneel SahaNo ratings yet
- Fireclass Addressable Fire Alarm Control Panels: Firmware Version 25Document24 pagesFireclass Addressable Fire Alarm Control Panels: Firmware Version 25Aleksandr GolosovNo ratings yet
- MC34161, MC33161, NCV33161 Universal Voltage Monitors: Marking DiagramsDocument21 pagesMC34161, MC33161, NCV33161 Universal Voltage Monitors: Marking DiagramsВалераNo ratings yet
- ARM920T ProcessorDocument14 pagesARM920T ProcessorgpuonlineNo ratings yet
- Datasheet LTC1298 LTC1286 PDFDocument24 pagesDatasheet LTC1298 LTC1286 PDFletterniNo ratings yet
- Nokia High Capacity TD-LTE 8-Pipe RadioDocument8 pagesNokia High Capacity TD-LTE 8-Pipe RadioYounesNo ratings yet
- Manual Pandora 6Document16 pagesManual Pandora 6cheski85No ratings yet
- Kickback NoiseDocument5 pagesKickback Noisekijiji userNo ratings yet
- Combinational Logic Design (Canonical Form)Document3 pagesCombinational Logic Design (Canonical Form)Asif Moien Ornob 1921680042No ratings yet
- Analysis of The Inverting Amplifier LectureDocument12 pagesAnalysis of The Inverting Amplifier LectureRohit PandeyNo ratings yet
- 8086Document54 pages8086Pavankumar KalliNo ratings yet
- T'DJ 609015deh 65FDocument1 pageT'DJ 609015deh 65Fzeb066No ratings yet
- How To Build Advanced ShortWave ReceiversDocument119 pagesHow To Build Advanced ShortWave Receiversiosif_viorelm100% (3)
- Eee NTDocument19 pagesEee NTvijayalakshmiv VEMURINo ratings yet
- Ce Assignment Set 13 PDFDocument6 pagesCe Assignment Set 13 PDFece.kavitha mamcetNo ratings yet
- Multiplexing: 8.1 Review QuestionsDocument4 pagesMultiplexing: 8.1 Review QuestionsOso PolNo ratings yet
- ECE 421 Lab4Document39 pagesECE 421 Lab4LuelsonCordovaDeclaradorNo ratings yet
- Instalallation Manual Controller KZ 700 U H VSADocument12 pagesInstalallation Manual Controller KZ 700 U H VSAStanisław KlimczakNo ratings yet
- Digital Design Lab Manual: Introduction To VerilogDocument48 pagesDigital Design Lab Manual: Introduction To VerilogKeith FernandesNo ratings yet
- Wiley - Wireless Power Transfer - Principles and ApplicationsDocument2 pagesWiley - Wireless Power Transfer - Principles and ApplicationstigreNo ratings yet