You might also like
- Exercices d'optique et d'électromagnétismeFrom EverandExercices d'optique et d'électromagnétismeRating: 5 out of 5 stars5/5 (1)
- Maintenance Mecanique Generale PrintDocument170 pagesMaintenance Mecanique Generale PrintAL Hamza100% (1)
- La Cotation FonctionnelleDocument7 pagesLa Cotation FonctionnelleToinou06100% (8)
- TD Automatique 1A JMD 2011Document20 pagesTD Automatique 1A JMD 2011Hajri MohamedNo ratings yet
- Cahier Des ChargesDocument4 pagesCahier Des ChargesMajda El-aouni0% (1)
- Le Controle QualitéDocument27 pagesLe Controle QualitéYassine El Ouadi100% (1)
- Cours Mecatronique 2Document27 pagesCours Mecatronique 2El Mouatez FakerNo ratings yet
- 8fa57-Perforateur A Papier Avec CorrectionDocument3 pages8fa57-Perforateur A Papier Avec CorrectionMajda El-aouni100% (3)
- Analyse Des Circuits Pneumatiquess Et Electropneumatiques 1Document70 pagesAnalyse Des Circuits Pneumatiquess Et Electropneumatiques 1Koukou AmkoukouNo ratings yet
- Formulaire BTSDocument17 pagesFormulaire BTSMoussa TirNo ratings yet
- INSA Toulouse 1A Electrocinétique 1 2008/2009 Régimes ContinusDocument20 pagesINSA Toulouse 1A Electrocinétique 1 2008/2009 Régimes Continuspurplera1n100% (1)
- Chap 5Document62 pagesChap 5mouradkadiriNo ratings yet
- S7.1.3 L'implantation D'un Ouvrage PDFDocument15 pagesS7.1.3 L'implantation D'un Ouvrage PDFSpy TrioNo ratings yet
- L2 en Cours 8 AO Divers ImpDocument5 pagesL2 en Cours 8 AO Divers ImpHHFFHHFHFNo ratings yet
- PVDocument14 pagesPVSafae Sabir100% (1)
- Correction TD 1Document5 pagesCorrection TD 1noubissi pascakNo ratings yet
- RapportDocument28 pagesRapportrajid oumaimaNo ratings yet
- Rdlo-Curvas 50 HZ PDFDocument40 pagesRdlo-Curvas 50 HZ PDFEnrique EM100% (1)
- Bond Graph Yassine1Document83 pagesBond Graph Yassine1Said LouhaNo ratings yet
- 1-Principe, Structure, ConstructionDocument29 pages1-Principe, Structure, ConstructionghandijihanNo ratings yet
- Bonds GraphDocument83 pagesBonds GraphYassine Lakhal100% (1)
- ELG2736 Slides Students Chapters 1-5Document146 pagesELG2736 Slides Students Chapters 1-5Gedeon KayaNo ratings yet
- Commande Électronique Des Moteurs 3Document268 pagesCommande Électronique Des Moteurs 3MaGMaaa WKNo ratings yet
- Transmission PuissanceDocument8 pagesTransmission PuissancePhilippe MortNo ratings yet
- Cours Bond Graph IIIFatima1Document79 pagesCours Bond Graph IIIFatima1ElnBEKKARYNo ratings yet
- Chapitre 1. Propagation Et Lignes de TransmissionDocument12 pagesChapitre 1. Propagation Et Lignes de Transmissionsihemfarah100% (1)
- Formulaire TSTI PDFDocument9 pagesFormulaire TSTI PDFRomuald GbagoueNo ratings yet
- ELT12 Systèmes Mono&Tri - 20-21 - CoursDocument26 pagesELT12 Systèmes Mono&Tri - 20-21 - CoursSALAH RABHINo ratings yet
- Graphe de Liaisons - WikipédiaDocument35 pagesGraphe de Liaisons - WikipédiaLOVELYNE ZEBAZENo ratings yet
- Chapitre 1Document8 pagesChapitre 1LOUNDOU orthegaNo ratings yet
- Thème N°4 - Chapitre 5 - TP N°2Document2 pagesThème N°4 - Chapitre 5 - TP N°2Fatima Ben CheikhNo ratings yet
- Energies Caractéristiques ProfDocument1 pageEnergies Caractéristiques ProfsylvestreNo ratings yet
- B - Chapitre 1Document12 pagesB - Chapitre 1forum algerieDZNo ratings yet
- Les Bonds Graph PDFDocument25 pagesLes Bonds Graph PDFMouad MouradNo ratings yet
- Chapitre 4 Transfo TotalDocument48 pagesChapitre 4 Transfo TotalMsadak KhawlaNo ratings yet
- TD Moteur-Courant-ContDocument2 pagesTD Moteur-Courant-Conthoussin unusNo ratings yet
- Cours Magnetisme (WWW - PDF-SWF - Com) PDFDocument19 pagesCours Magnetisme (WWW - PDF-SWF - Com) PDFYoucef Br'sNo ratings yet
- 02AC2.2 - Puissance Et Rendement - ELEVEDocument6 pages02AC2.2 - Puissance Et Rendement - ELEVESewa MensahNo ratings yet
- Electrocinétique - Chapitre 2 Régimes Transitoires-Circuits Linéaires Du 1er Ordr3Document3 pagesElectrocinétique - Chapitre 2 Régimes Transitoires-Circuits Linéaires Du 1er Ordr3yasuoyavyNo ratings yet
- Unités Et Formules SimplesDocument4 pagesUnités Et Formules SimplesramiNo ratings yet
- MCIL2 - EG - Chapitre 1Document16 pagesMCIL2 - EG - Chapitre 1zinouu113113No ratings yet
- Formulaire de Physique-1 PDFDocument20 pagesFormulaire de Physique-1 PDFNdam ChachaNo ratings yet
- Chapitre 1Document16 pagesChapitre 1TadjeZadNo ratings yet
- RedressDocument13 pagesRedressOussamaNajiNo ratings yet
- Electricité Cours I1Document38 pagesElectricité Cours I1TrhaxNo ratings yet
- Rappels Delectricite EtudiantsDocument4 pagesRappels Delectricite EtudiantsAlex 62No ratings yet
- Chapitre N42Document7 pagesChapitre N42Bet EdeNo ratings yet
- 01 Lois de Kirchhoff, Dipôles ÉlectrocinétiquesDocument7 pages01 Lois de Kirchhoff, Dipôles Électrocinétiquessalem nour100% (1)
- Diapo de CoursDocument23 pagesDiapo de CoursHamza BenineNo ratings yet
- Résumé de ElectroDocument2 pagesRésumé de ElectroEs.sabery IsmailNo ratings yet
- Circuit RLC en Régime Sinusoïdal ForceDocument11 pagesCircuit RLC en Régime Sinusoïdal ForceSAWADOGO HAMEDNo ratings yet
- Schemas FonctionnelsDocument6 pagesSchemas FonctionnelsWà Łîď Ký0% (1)
- Syll TP Phys2 2022 2023Document87 pagesSyll TP Phys2 2022 2023Duygu M100% (1)
- Cours Roues de Friction Poulies Et Courroies Roues Et ChainesDocument7 pagesCours Roues de Friction Poulies Et Courroies Roues Et ChainesC'est YanaNo ratings yet
- Resumé Electromagnetisme - EnicarDocument5 pagesResumé Electromagnetisme - Enicarafif tarkhani0% (1)
- Ordre 2 MCCDocument6 pagesOrdre 2 MCCBahija KOUHAILNo ratings yet
- Exer Chap1 AsservDocument6 pagesExer Chap1 AsservIbtissam Et-taoutiNo ratings yet
- TP Asservissement2024Document6 pagesTP Asservissement2024rachidiguir2002No ratings yet
- NOTIONS PRELIMINAIRES - Electricite Industrielle2020Document14 pagesNOTIONS PRELIMINAIRES - Electricite Industrielle2020Zack MahmoudiNo ratings yet
- I EEPF HAN 130611 Rev2Document60 pagesI EEPF HAN 130611 Rev2Rabah100% (1)
- Formulaire PDFDocument28 pagesFormulaire PDFSven BordenNo ratings yet
- Formulaire PDFDocument28 pagesFormulaire PDFllagrangNo ratings yet
- PC PDFDocument125 pagesPC PDFOussama Karoum100% (1)
- Bilans MacroscopiquesDocument6 pagesBilans MacroscopiquesAdnane KinaniNo ratings yet
- Travaux Dirigs-1Document5 pagesTravaux Dirigs-1Azzeddine EL-OhnNo ratings yet
- Electrotech GCDocument38 pagesElectrotech GCchaoukiNo ratings yet
- Cours de Circuits ElectriquesDocument37 pagesCours de Circuits ElectriquesYazid EssaiNo ratings yet
- CHAP1 - Etude Des Circuits Électriques en Régime ContinuDocument6 pagesCHAP1 - Etude Des Circuits Électriques en Régime ContinuIlyas IlyasNo ratings yet
- General It EsDocument9 pagesGeneral It EsZamecheNo ratings yet
- TP 19 HacheurDocument5 pagesTP 19 Hacheurmaher alouiNo ratings yet
- Choix de Matriaux PDFDocument6 pagesChoix de Matriaux PDFMajda El-aouniNo ratings yet
- Choix de Matriaux PDFDocument6 pagesChoix de Matriaux PDFMajda El-aouniNo ratings yet
- nrc017 Liaison Encastrement PDFDocument2 pagesnrc017 Liaison Encastrement PDFMajda El-aouniNo ratings yet
- Formation GRAFCET Cours 13 PDFDocument42 pagesFormation GRAFCET Cours 13 PDFPaul DayangNo ratings yet
- 1 - Introduction Aux Problèmes de Conception PDFDocument25 pages1 - Introduction Aux Problèmes de Conception PDFMajda El-aouniNo ratings yet
- Cours Microcontroleur PDFDocument45 pagesCours Microcontroleur PDFErragueb Moussaoui IdrissiNo ratings yet
- Formation GRAFCET Cours 13 PDFDocument42 pagesFormation GRAFCET Cours 13 PDFPaul DayangNo ratings yet
- Cours RDM2013FinalDocument65 pagesCours RDM2013FinalMajda El-aouniNo ratings yet
- Allal El-Moussaoui CVDocument2 pagesAllal El-Moussaoui CVMajda El-aouniNo ratings yet
- La Cotation FonctionnelleDocument14 pagesLa Cotation FonctionnelleMajda El-aouniNo ratings yet
- Fiche Validation Stage2017 2018Document1 pageFiche Validation Stage2017 2018Majda El-aouniNo ratings yet
- Exercise 2.5 Axes (2005-2006) Problem StatementDocument44 pagesExercise 2.5 Axes (2005-2006) Problem StatementMajda El-aouniNo ratings yet
- Cahier Des ChargesDocument1 pageCahier Des ChargesMajda El-aouniNo ratings yet
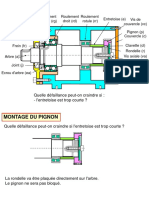
- Reducteur: Quelle Défaillance Peut-On Craindre Si: - L'entretoise Est Trop Courte ?Document26 pagesReducteur: Quelle Défaillance Peut-On Craindre Si: - L'entretoise Est Trop Courte ?Majda El-aouniNo ratings yet
- TP-Pièces en BoisDocument6 pagesTP-Pièces en BoisBen FahNo ratings yet
- Cahier Des ChargesDocument1 pageCahier Des ChargesMajda El-aouniNo ratings yet
- TP-Pièces en BoisDocument6 pagesTP-Pièces en BoisBen FahNo ratings yet
- Ex Chainedenergie TCTDocument6 pagesEx Chainedenergie TCTMajda El-aouniNo ratings yet
- Mod2dtpro PDFDocument9 pagesMod2dtpro PDFMajda El-aouniNo ratings yet
- Pièce Jointe 1Document1 pagePièce Jointe 1Majda El-aouniNo ratings yet
- Applic1 Cor3Document10 pagesApplic1 Cor3Majda El-aouniNo ratings yet
- 2010 2011 Reseau TD3 Plan - Adressage Corrige - OdtDocument2 pages2010 2011 Reseau TD3 Plan - Adressage Corrige - OdtfeubaNo ratings yet
- TransmissionDocument20 pagesTransmissionIsmail BarbourNo ratings yet
- Complex Book FinalDocument118 pagesComplex Book Finalsawahkouba1No ratings yet
- Systèmes D'équations LinéairesDocument4 pagesSystèmes D'équations LinéairesWhatgreenNo ratings yet
- Ir2200 2800 3300-Sm-FreDocument767 pagesIr2200 2800 3300-Sm-Frecephas shurato100% (1)
- INTRODUCTIONDocument29 pagesINTRODUCTIONsalahouchenesalahNo ratings yet
- Dokumen - Tips - TD Systemes 21Document2 pagesDokumen - Tips - TD Systemes 21Ķħ Älīl CħễħäŤäNo ratings yet
- Sujets MASAFEQ 2019 V 1 3 Oct24Document18 pagesSujets MASAFEQ 2019 V 1 3 Oct24smailNo ratings yet
- La Couche Liaison de DonnéesDocument21 pagesLa Couche Liaison de DonnéesLeila KararNo ratings yet
- APolycopié UE3!22!23Document162 pagesAPolycopié UE3!22!23dogal40484No ratings yet
- ArithmetiqueDocument10 pagesArithmetiqueHero ZargaNo ratings yet
- Chapitre2 Suites de Nombres RéelsDocument16 pagesChapitre2 Suites de Nombres Réelsmohamed pharmNo ratings yet
- TP KhodjaDocument13 pagesTP KhodjafaroukNo ratings yet
- Exemple de Retro Calcul Sur CarriereDocument87 pagesExemple de Retro Calcul Sur CarriereGhislain CordierNo ratings yet
- La Leçon 1Document17 pagesLa Leçon 1Ahmed S, A. ALASMAWYNo ratings yet
- TP Algorithme AvancéDocument2 pagesTP Algorithme AvancéAdham NuiakhNo ratings yet
- Mechanical-Properties-Cours (Presentation)Document28 pagesMechanical-Properties-Cours (Presentation)amir11sahli11No ratings yet
- Cours Physiovégétale2Document23 pagesCours Physiovégétale2Rachid AIT ELAYADNo ratings yet
- Cours3 MIAGEDocument5 pagesCours3 MIAGEalilounahdiste100% (1)
- TD CorrDocument19 pagesTD Corrfarah AfouzarNo ratings yet
- Peugeot 307 Break (Oct 2005 Mai 2006) Notice Mode Emploi Manuel Guide PDFDocument194 pagesPeugeot 307 Break (Oct 2005 Mai 2006) Notice Mode Emploi Manuel Guide PDFCLAKOS100% (2)
- Ziti Salah EddineDocument4 pagesZiti Salah EddineSalah-eddine ZitiNo ratings yet
- Principe de PeterDocument6 pagesPrincipe de Peternradhy2725No ratings yet
- CHAP1 - PV - Chap4 - Nutrition en EauDocument5 pagesCHAP1 - PV - Chap4 - Nutrition en EauSagacious IvejutenNo ratings yet