You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Pembangunan Underpass KM 319 + 370 Antara Bumiayu - Kretek Lintas Cirebon - Kroya Dengan Metode PenyanggaDocument10 pagesPembangunan Underpass KM 319 + 370 Antara Bumiayu - Kretek Lintas Cirebon - Kroya Dengan Metode PenyanggaTEKNIKNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Pembangunan Underpass KM 319 + 370 Antara Bumiayu - Kretek Lintas Cirebon - Kroya Dengan Metode PenyanggaDocument10 pagesPembangunan Underpass KM 319 + 370 Antara Bumiayu - Kretek Lintas Cirebon - Kroya Dengan Metode PenyanggaTEKNIKNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Condition ASD LRFD Related Info: W-Shapes - S-Shapes - C-And MC-ShapesDocument4 pagesCondition ASD LRFD Related Info: W-Shapes - S-Shapes - C-And MC-Shapesanand77ininNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
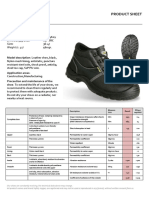
- Safety BoyDocument1 pageSafety BoyfiqriNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Son Dip On ThesisDocument228 pagesSon Dip On ThesisFatoom HashimNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- 339 0047 0001Document74 pages339 0047 0001zzapiecheNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- CHE3044F Reactor Design Tutorial ProblemsDocument4 pagesCHE3044F Reactor Design Tutorial ProblemsnmhatityeNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Tuao Vocational and Technical School Senior High School DepartmentDocument9 pagesTuao Vocational and Technical School Senior High School DepartmentMarvelyn Maneclang CatubagNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Application of NanozymesDocument15 pagesApplication of NanozymeslalaNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Pe312-Natural Gas Engineering S&DDocument33 pagesPe312-Natural Gas Engineering S&DMalugu JohnNo ratings yet
- CFD ANALYSIS OF NACA 0012 AIRFOILDocument77 pagesCFD ANALYSIS OF NACA 0012 AIRFOILHassan Ayub KhanNo ratings yet
- Heat Transfer Presentation: Modes and LawsDocument16 pagesHeat Transfer Presentation: Modes and LawsmehediNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Lab 7-3 Interpreting Weather Station ModelsDocument4 pagesLab 7-3 Interpreting Weather Station Modelsapi-55192583150% (2)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- BJ Fundamental of Logging PDFDocument369 pagesBJ Fundamental of Logging PDFLeonardo Barrios CarreraNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Arch 415-S&TD - M2 - T3 - W3Document24 pagesArch 415-S&TD - M2 - T3 - W3Harvey JudalenaNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Applications of Thermo Gravimetric Analysis (Tga)Document13 pagesApplications of Thermo Gravimetric Analysis (Tga)Usman GhaniNo ratings yet
- Q4 LP7 GenPysics2Document11 pagesQ4 LP7 GenPysics2ROMELYN GRACE BORBENo ratings yet
- IM DE Chapter 1 Lect 2 - ELIMINATION OF CONSTANTSDocument3 pagesIM DE Chapter 1 Lect 2 - ELIMINATION OF CONSTANTSAllan Gabriel LariosaNo ratings yet
- MP ProblemsDocument2 pagesMP Problemskartikesh prasadNo ratings yet
- Laser Beam Expanders Basics and Applications: Vision System Vision SystemDocument6 pagesLaser Beam Expanders Basics and Applications: Vision System Vision SystemAtul SharmaNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Spark LightningDocument92 pagesSpark LightningaaNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Wps For Smaw06-001 (Pipe 6g CS)Document10 pagesWps For Smaw06-001 (Pipe 6g CS)walitedisonNo ratings yet
- Datasheet Uni Flex ASB Open Top RadiusDocument4 pagesDatasheet Uni Flex ASB Open Top RadiusIkki Muhammad AssidqiNo ratings yet
- Iso 14224 2016 187 192Document6 pagesIso 14224 2016 187 192Ostap SepykNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Material Science L-Photonic MaterialsDocument28 pagesMaterial Science L-Photonic MaterialsSaheer ShaikNo ratings yet
- EquilibriaDocument57 pagesEquilibriaRaishaSheikh04No ratings yet
- James B. Foresman - Aeleen Frisch - Exploring Chemistry With Electronic Structure Methods (2015) PDFDocument551 pagesJames B. Foresman - Aeleen Frisch - Exploring Chemistry With Electronic Structure Methods (2015) PDFComputacional Primeira contaNo ratings yet
- Grasping Leather Plies by Bernoulli GrippersDocument4 pagesGrasping Leather Plies by Bernoulli GrippersJavier QuirogaNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The TDC Device - Synopsis of Email CorrespondencesDocument7 pagesThe TDC Device - Synopsis of Email Correspondencestriple7incNo ratings yet
- Aib - Ga75vsd+ Api868168Document104 pagesAib - Ga75vsd+ Api868168SNOOPY YTNo ratings yet
- Recent Advances On Hybrid Integration of 2D Materials On Integrated Optics PlatformsDocument24 pagesRecent Advances On Hybrid Integration of 2D Materials On Integrated Optics PlatformsArka GhoshNo ratings yet
- Beam Is Code Crackwidth ValidationDocument1 pageBeam Is Code Crackwidth ValidationNirbhayNo ratings yet
- Modeling - Rigid End OffsetsDocument7 pagesModeling - Rigid End OffsetsAnonymous DNb6yWERfB100% (1)
- Amptpl: Adani Murmugao Port Terminal Private LimitedDocument58 pagesAmptpl: Adani Murmugao Port Terminal Private LimitedMinh TríNo ratings yet
- lc140 EngDocument2 pageslc140 EnganassNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)