You might also like
- Registro SPDocument24 pagesRegistro SPAngel Alejandro ContrerasNo ratings yet
- Glosario Inglés Español de Términos Técnicos PetrolerosDocument36 pagesGlosario Inglés Español de Términos Técnicos PetrolerosKarla May GutiérrezNo ratings yet
- Term I NacionDocument4 pagesTerm I NacionAngel Alejandro ContrerasNo ratings yet
- Caracteristicas PetrofisicasDocument57 pagesCaracteristicas Petrofisicasjair2590No ratings yet
- Ingeniería de Perforación de PozosDocument10 pagesIngeniería de Perforación de PozosGerardo R. SoberanisNo ratings yet
- Bombas Centrifugas 1Document88 pagesBombas Centrifugas 1Angel Alejandro ContrerasNo ratings yet
- 07 Registros Durante La Perforación MWD - LWDDocument36 pages07 Registros Durante La Perforación MWD - LWDRojasEduardo94% (18)
- Problema 3 de Yacimientos 2Document10 pagesProblema 3 de Yacimientos 2Angel Alejandro ContrerasNo ratings yet
- Cami y Dani InglesDocument1 pageCami y Dani InglesAngel Alejandro ContrerasNo ratings yet
- Anexos Técnico Árbol de Válvulas 07-03-11Document65 pagesAnexos Técnico Árbol de Válvulas 07-03-11Toño TorresNo ratings yet
- GEOMECÁNICADocument1 pageGEOMECÁNICAAngel Alejandro ContrerasNo ratings yet
- Diagrama PVTDocument1 pageDiagrama PVTAngel Alejandro ContrerasNo ratings yet
- 6.3 Evolucion de Tecnicas de PerforacionDocument70 pages6.3 Evolucion de Tecnicas de PerforacionAngel Alejandro Contreras100% (2)
- FG O IPET-2010-231 Ingenieria de Perforacion de PozosDocument2 pagesFG O IPET-2010-231 Ingenieria de Perforacion de PozosAngel Alejandro ContrerasNo ratings yet
- Exp SabadoooDocument18 pagesExp SabadoooAngel Alejandro ContrerasNo ratings yet
- Admon DirectaDocument4 pagesAdmon DirectaAngel Alejandro ContrerasNo ratings yet
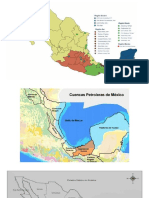
- Regiones Petroleras MapasDocument6 pagesRegiones Petroleras MapasAngel Alejandro ContrerasNo ratings yet
- Admon DirectaDocument4 pagesAdmon DirectaAngel Alejandro ContrerasNo ratings yet
- Tipos de RobotsDocument3 pagesTipos de RobotsAngel Alejandro ContrerasNo ratings yet
- Distribución de FrecuenciasDocument6 pagesDistribución de FrecuenciasAngel Alejandro ContrerasNo ratings yet
- Practica 1 TermoDocument9 pagesPractica 1 TermoAngel Alejandro ContrerasNo ratings yet
- 0 Tecnica ExpositivaDocument18 pages0 Tecnica ExpositivaAngel Alejandro ContrerasNo ratings yet
- AngelDocument3 pagesAngelAngel Alejandro ContrerasNo ratings yet
- Correccion de ActividadesDocument2 pagesCorreccion de ActividadesAngel Alejandro ContrerasNo ratings yet
- 3cp Contreras Pimentel Act 5Document1 page3cp Contreras Pimentel Act 5Angel Alejandro ContrerasNo ratings yet
- 3cp Contreras Pimentel Act 1Document1 page3cp Contreras Pimentel Act 1Angel Alejandro ContrerasNo ratings yet
- 3cp Contreras Pimentel Act 4Document1 page3cp Contreras Pimentel Act 4Angel Alejandro ContrerasNo ratings yet
- 3cp Contreras Pimentel Act 3Document1 page3cp Contreras Pimentel Act 3Angel Alejandro ContrerasNo ratings yet
- Practica GeoloDocument2 pagesPractica GeoloAngel Alejandro ContrerasNo ratings yet
- Silabo de Taller de Programacion WebDocument6 pagesSilabo de Taller de Programacion WebVictor David Ochoa MamaniNo ratings yet
- Presentacion Brainstorming Lluvia de Ideas Doodle BlancoDocument10 pagesPresentacion Brainstorming Lluvia de Ideas Doodle BlancoAlan BastidaNo ratings yet
- Division de Polinomios Joffre AlgebraDocument3 pagesDivision de Polinomios Joffre AlgebraFreddy Joffre Murrieta PNo ratings yet
- Its DahuaDocument32 pagesIts DahuaOscar Julio Espinoza MachacaNo ratings yet
- Dgfa Aprendizajes Esenciales BGDocument39 pagesDgfa Aprendizajes Esenciales BGRigoberto FloresNo ratings yet
- Sindrome de BurnoutDocument15 pagesSindrome de Burnoutlily_evans100% (5)
- Guia de Laboratorio Efluentes 1-2020Document45 pagesGuia de Laboratorio Efluentes 1-2020JaquelineNo ratings yet
- F-DC-124 Propuesta Trabajo Grado PI DTeI Mono Emprend V1Document11 pagesF-DC-124 Propuesta Trabajo Grado PI DTeI Mono Emprend V1María Camila Vesga CamachoNo ratings yet
- Composicion Musical Creacion Injuve 2012Document28 pagesComposicion Musical Creacion Injuve 2012Julian M. TapiasNo ratings yet
- Triptico Operativo Motociclista PDFDocument2 pagesTriptico Operativo Motociclista PDFMiguel Aguilar SánchezNo ratings yet
- Chantaje EmocionalDocument4 pagesChantaje EmocionalKevyn AlejosNo ratings yet
- Requisitos SssroDocument2 pagesRequisitos SssroArturo Lucana CalleNo ratings yet
- Guías GOLD para EPOC PDFDocument40 pagesGuías GOLD para EPOC PDFPricess AnyelNo ratings yet
- El Origen Del Concepto "Modelo de Negocio" - Business Model SCOPE (Castellano)Document5 pagesEl Origen Del Concepto "Modelo de Negocio" - Business Model SCOPE (Castellano)HectorDelRosarioNo ratings yet
- Aprendizaje Como ProductoDocument3 pagesAprendizaje Como ProductoIsis Schmitt CernaNo ratings yet
- AR212 Modelación Estructural Ii 201901Document9 pagesAR212 Modelación Estructural Ii 201901arantxaNo ratings yet
- Actividad de Puntos Evaluables - Escenario 2 - PRIMER BLOQUE-CIENCIAS BASICAS - CALCULO II - (GRUPO B02)Document3 pagesActividad de Puntos Evaluables - Escenario 2 - PRIMER BLOQUE-CIENCIAS BASICAS - CALCULO II - (GRUPO B02)JulyBerrioMejiaNo ratings yet
- Macro Entorno y Micro Entorno de Óptica ZevallosDocument42 pagesMacro Entorno y Micro Entorno de Óptica ZevallosEduardo SalazarNo ratings yet
- Instructivo Dahua - App en CelularesDocument9 pagesInstructivo Dahua - App en CelularesAlejandro ParenteNo ratings yet
- Alexis GonzalesDocument3 pagesAlexis GonzalesMaicol Mio NegreirosNo ratings yet
- Las Industrias Básicas en VenezuelaDocument70 pagesLas Industrias Básicas en VenezuelaMaii Bell'o100% (4)
- Reducción de Ácidos Carboxílicos y Sus DerivadosDocument10 pagesReducción de Ácidos Carboxílicos y Sus DerivadosSilvia Rivera Sivila50% (2)
- El Espantapájaros y El BailarínDocument10 pagesEl Espantapájaros y El BailarínJorgeNo ratings yet
- Psico Organización DisgregadoraDocument2 pagesPsico Organización Disgregadorarita de menendez50% (2)
- Secuencia Estadistica 1Document5 pagesSecuencia Estadistica 1Alejandro RetaNo ratings yet
- Ej Excel BasDocument14 pagesEj Excel BasAndre SánchezNo ratings yet
- MatemáticasDocument2 pagesMatemáticasYeimi GaitanNo ratings yet
- IIDZ-3226 Seguridad Industrial 2021-20 SBDocument15 pagesIIDZ-3226 Seguridad Industrial 2021-20 SBIsrael Sebastian PáezNo ratings yet
- Adams Lite-8380V B140715-01Document2 pagesAdams Lite-8380V B140715-01octavio omar villegasNo ratings yet
- Folleto 4930 - Que Es RotaractDocument2 pagesFolleto 4930 - Que Es RotaractescribileamiguelNo ratings yet