You might also like
- 11+ CEM English and Verbal Reasoning PRACTICE PAPER 1Document15 pages11+ CEM English and Verbal Reasoning PRACTICE PAPER 1OlawaleNo ratings yet
- Final Differential Equations (PDF)Document88 pagesFinal Differential Equations (PDF)Tina ShahNo ratings yet
- Gold Experience B1 WorkbookDocument14 pagesGold Experience B1 WorkbookOli Sisti100% (2)
- Module-23 - Nyquist Stability Criterion: EE3101-Control Systems EngineeringDocument7 pagesModule-23 - Nyquist Stability Criterion: EE3101-Control Systems EngineeringhariNo ratings yet
- Flip-Flops and Related Devices CHAPTER 5Document32 pagesFlip-Flops and Related Devices CHAPTER 5badhell_18100% (1)
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsFrom EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNo ratings yet
- DSD BookDocument270 pagesDSD BookROUGH X YTNo ratings yet
- QUAN-Computer System Architecture-DescriptiveDocument66 pagesQUAN-Computer System Architecture-DescriptiveDebanjan PatraNo ratings yet
- 07 Flip Flop and ApplicationDocument20 pages07 Flip Flop and ApplicationChen ShyanNo ratings yet
- Class 2Document90 pagesClass 2Great GuyNo ratings yet
- Vlsi Iiest SBDocument45 pagesVlsi Iiest SBUshaRaniDashNo ratings yet
- Notes - Lecture - Chapter 4Document2 pagesNotes - Lecture - Chapter 4bryan challco coronelNo ratings yet
- Lect Register EE208Document16 pagesLect Register EE208Anonymous 001No ratings yet
- Digital Circuits - Application of Shift RegistersDocument4 pagesDigital Circuits - Application of Shift RegistersB.Prashant JhaNo ratings yet
- Solution PDFDocument5 pagesSolution PDFCedric SunNo ratings yet
- 1.0 Numbering SystemsDocument37 pages1.0 Numbering SystemsPraise PhillipsNo ratings yet
- Chapter 6Document7 pagesChapter 6DAWA PENJORNo ratings yet
- CSE 460 Lec 7Document9 pagesCSE 460 Lec 7Shovon BhowmickNo ratings yet
- Lab D4 CounterDocument8 pagesLab D4 Counterdhanabadee.kNo ratings yet
- 18s Cpe221 Test1 SolutionDocument4 pages18s Cpe221 Test1 SolutionKyra LathonNo ratings yet
- 5.instruction Set 8051Document92 pages5.instruction Set 8051dikshant SolankiNo ratings yet
- Y (S) U (S)Document5 pagesY (S) U (S)Luis CarvalhoNo ratings yet
- Learning Objectives:: Topic 2.2.3 - BCD Counter Topic 2.2.4 - Decade CounterDocument35 pagesLearning Objectives:: Topic 2.2.3 - BCD Counter Topic 2.2.4 - Decade CountersuriantoNo ratings yet
- Analog and Digital Electronics Lab: Experiment - 7Document16 pagesAnalog and Digital Electronics Lab: Experiment - 7Ashutosh GuptaNo ratings yet
- Root Locus Notes - FullDocument59 pagesRoot Locus Notes - Fullrahulsrinivas kNo ratings yet
- The Application of The Z Transform 5.6 Transfer Functions For Digital Filters 5.7 Amplitude and Delay DistortionDocument53 pagesThe Application of The Z Transform 5.6 Transfer Functions For Digital Filters 5.7 Amplitude and Delay DistortionBelaliaNo ratings yet
- 16 32 r0 RTN Program Counter or PC: CPE 221 Test 1 Solution Spring 2019Document4 pages16 32 r0 RTN Program Counter or PC: CPE 221 Test 1 Solution Spring 2019Kyra LathonNo ratings yet
- Ic Lab AllDocument45 pagesIc Lab AllRaghu KasulaNo ratings yet
- Electrical Circuits and Systems II LaboratoryDocument4 pagesElectrical Circuits and Systems II Laboratoryluis diaz contreraNo ratings yet
- Working With Combinational LogicDocument62 pagesWorking With Combinational Logic박대민No ratings yet
- A Random Counter in Using Shift Register and EncoderDocument5 pagesA Random Counter in Using Shift Register and EncoderNurhaliza HsNo ratings yet
- ECE 218 Fall Special Probs Ver 4Document2 pagesECE 218 Fall Special Probs Ver 4Anh Quân Nguyễn ThắngNo ratings yet
- Electronic Instrumentation: Experiment 7 Digital Logic Devices and The 555 TimerDocument49 pagesElectronic Instrumentation: Experiment 7 Digital Logic Devices and The 555 TimerDon FodorNo ratings yet
- Adder and Flip-Flop 2EL11Document19 pagesAdder and Flip-Flop 2EL11CogCoilNo ratings yet
- 8051 Arithmetic InstDocument59 pages8051 Arithmetic InstNilesh DesaiNo ratings yet
- MidtermExamSolutions ECE-171 PSUDocument4 pagesMidtermExamSolutions ECE-171 PSUAbdullah EmsalimNo ratings yet
- 18s Cpe221 Final SolutionDocument7 pages18s Cpe221 Final SolutionKyra LathonNo ratings yet
- DLD Lab ManualDocument48 pagesDLD Lab ManualShilpa PandeyNo ratings yet
- AnswersDocument167 pagesAnswersmilindpaladugu01No ratings yet
- 19f Cpe221 Test1 SolutionDocument4 pages19f Cpe221 Test1 SolutionKyra LathonNo ratings yet
- EE222 ProjectDocument23 pagesEE222 ProjectJakob NandNo ratings yet
- Laboratory Exercise 6: Adders, Subtractors, and MultipliersDocument7 pagesLaboratory Exercise 6: Adders, Subtractors, and MultipliersRyan ReasNo ratings yet
- Tutorial CCB1223Document7 pagesTutorial CCB1223MOHD ZAMRI BIN IBRAHIMNo ratings yet
- Jump, Loop and Call InstructionsDocument93 pagesJump, Loop and Call InstructionsmeNo ratings yet
- Jump, Loop and Call Instructions: University of Engineering and Technology TaxilaDocument93 pagesJump, Loop and Call Instructions: University of Engineering and Technology TaxilaPraneetha InumarthiNo ratings yet
- Review Exam 1: EE 308 Spring 2011Document21 pagesReview Exam 1: EE 308 Spring 2011Abdullah Al MukitNo ratings yet
- Instruction Set of 8085 Microprocessor PDFDocument4 pagesInstruction Set of 8085 Microprocessor PDFAyon DasNo ratings yet
- Lesson 15: Bode Plots of Transfer Functions: ET 438a Automatic Control Systems TechnologyDocument13 pagesLesson 15: Bode Plots of Transfer Functions: ET 438a Automatic Control Systems Technologycantik cuteNo ratings yet
- Table 7-4: 560 Sequential Logic Design PrinciplesDocument10 pagesTable 7-4: 560 Sequential Logic Design PrinciplesAkhilesh SinghNo ratings yet
- EXP.10 Digital Display (NEW)Document7 pagesEXP.10 Digital Display (NEW)sAM nOBLESNo ratings yet
- Fall 2022 - CS501 - 1Document4 pagesFall 2022 - CS501 - 1Husnain IqbalNo ratings yet
- Seven Segments ReportDocument12 pagesSeven Segments ReportJun TobiasNo ratings yet
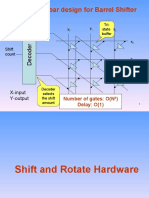
- NXN Crossbar Design For Barrel Shifter: X-Input Y-OutputDocument18 pagesNXN Crossbar Design For Barrel Shifter: X-Input Y-Outputhamza abbasNo ratings yet
- CEG 2136 - Fall 2012 - MidtermDocument8 pagesCEG 2136 - Fall 2012 - MidtermAmin DhouibNo ratings yet
- Binary Arithmetic & Alus: O Objectives O Reading AssignmentDocument10 pagesBinary Arithmetic & Alus: O Objectives O Reading AssignmentMa SeenivasanNo ratings yet
- Lec08 2015Document42 pagesLec08 2015Abdelmajid AbouloifaNo ratings yet
- Dldlab6 justPreLabDocument10 pagesDldlab6 justPreLabArfaat SanitaryNo ratings yet
- Complete Note Chapter 4Document72 pagesComplete Note Chapter 4ram5nath-3No ratings yet
- Digital Lab Report 3Document8 pagesDigital Lab Report 3علي عليNo ratings yet
- Rr210203 Switching Theory and Logic DesignDocument8 pagesRr210203 Switching Theory and Logic DesignSrinivasa Rao G100% (2)
- 16EI204 Digital Logic CircuitsDocument64 pages16EI204 Digital Logic CircuitsSanthoshkumar SethuramanNo ratings yet
- Digital Electronics 2: Sequential and Arithmetic Logic CircuitsFrom EverandDigital Electronics 2: Sequential and Arithmetic Logic CircuitsRating: 5 out of 5 stars5/5 (1)
- Exercise ProblemsDocument2 pagesExercise ProblemshariNo ratings yet
- Module2-Control System Basic Structure: EE3101-Control Systems EngineeringDocument6 pagesModule2-Control System Basic Structure: EE3101-Control Systems EngineeringhariNo ratings yet
- CSLP 1.1 RMDocument7 pagesCSLP 1.1 RMhariNo ratings yet
- Digital System Design: Course Educational ObjectivesDocument5 pagesDigital System Design: Course Educational ObjectiveshariNo ratings yet
- BOM Motivation (Unit III)Document20 pagesBOM Motivation (Unit III)hariNo ratings yet
- Module 14: Leadership Learning Objectives: George TerryDocument11 pagesModule 14: Leadership Learning Objectives: George TerryhariNo ratings yet
- Module-17 - Routh-Hurwitz Criterion: EE3101-Control Systems EngineeringDocument8 pagesModule-17 - Routh-Hurwitz Criterion: EE3101-Control Systems EngineeringhariNo ratings yet
- Bom MboDocument10 pagesBom MbohariNo ratings yet
- BOM Leadership Unit IIIDocument23 pagesBOM Leadership Unit IIIhariNo ratings yet
- Rbigradebmainsexam2012 Paper III Finance and Management PDFDocument2 pagesRbigradebmainsexam2012 Paper III Finance and Management PDFhariNo ratings yet
- Summer Semester Remedial Time TableDocument1 pageSummer Semester Remedial Time TablehariNo ratings yet
- BOM OrganizingDocument30 pagesBOM OrganizinghariNo ratings yet
- StudentsAttendanceOctober 2017 07112017-F2Document173 pagesStudentsAttendanceOctober 2017 07112017-F2hariNo ratings yet
- 329 PDFDocument1 page329 PDFhariNo ratings yet
- FTP PDFDocument1 pageFTP PDFhariNo ratings yet
- Iiit R.K.Valley, Rgukt Ap: IT Infra Related Problems Can Be Reported To Following MembersDocument1 pageIiit R.K.Valley, Rgukt Ap: IT Infra Related Problems Can Be Reported To Following MembershariNo ratings yet
- Sınıf 2. Yazılı A-B RelearnDocument5 pagesSınıf 2. Yazılı A-B RelearncanerNo ratings yet
- Analysis of The Flow Induced by Air-Bubble SystemsDocument16 pagesAnalysis of The Flow Induced by Air-Bubble SystemsStephany CamacaroNo ratings yet
- Psychology Concepts and Applications 4Th Edition Nevid Solutions Manual Full Chapter PDFDocument49 pagesPsychology Concepts and Applications 4Th Edition Nevid Solutions Manual Full Chapter PDFfidelmanhangmhr100% (9)
- 4UIE - AB - Nov 23Document2 pages4UIE - AB - Nov 23aaaNo ratings yet
- Practical Research 2 Module 1: Characteristics, Strengths, Weaknesses, and Kinds of Quantitative ResearchDocument6 pagesPractical Research 2 Module 1: Characteristics, Strengths, Weaknesses, and Kinds of Quantitative Research306947 Bancal Pugad ISNo ratings yet
- Eng8Quarter1Week1 2Document6 pagesEng8Quarter1Week1 2Duero-Hadjilatip KayeNo ratings yet
- GALCIT 6-Inch Shock Tube: Bryan SchmidtDocument14 pagesGALCIT 6-Inch Shock Tube: Bryan SchmidtNitesh Kumar PatelNo ratings yet
- Modul Customer ServiceDocument5 pagesModul Customer ServiceFandy Bestario HarlanNo ratings yet
- Computer Application in BusinessDocument3 pagesComputer Application in BusinessChegg UserNo ratings yet
- 2021 Redding CatalogDocument44 pages2021 Redding CatalogRobert AugerNo ratings yet
- Blue A Ks2 Test3Document6 pagesBlue A Ks2 Test3Mateo García-PumarinoNo ratings yet
- Acer V193 Service ManualDocument46 pagesAcer V193 Service Manualagun92No ratings yet
- Powerpoint TrainingDocument22 pagesPowerpoint TrainingDenise SuNo ratings yet
- P700 1 (4PP) GB (0213) PDFDocument4 pagesP700 1 (4PP) GB (0213) PDFShahzad AliNo ratings yet
- 12 Cumulative Record GunjanDocument25 pages12 Cumulative Record GunjanramandeepNo ratings yet
- Samsung Kct52a Chassis ct6846p TV SM PDFDocument34 pagesSamsung Kct52a Chassis ct6846p TV SM PDFFrank DiazNo ratings yet
- ATS Monitoring Device InstructionsDocument25 pagesATS Monitoring Device InstructionsVinhNo ratings yet
- Effects of Reservoir Heterogeneity in Laminated ReservoirsDocument3 pagesEffects of Reservoir Heterogeneity in Laminated ReservoirsErik Andres Garcia VillarroelNo ratings yet
- Edi WowDocument11 pagesEdi WowfantasighNo ratings yet
- Motorola Pt4 - VHF - WWW - Manualesderadios.com - ArDocument24 pagesMotorola Pt4 - VHF - WWW - Manualesderadios.com - Arpisy74No ratings yet
- GX30G Non EU (150113) - ??Document2 pagesGX30G Non EU (150113) - ??ggpetNo ratings yet
- GLS Poland Z Tytuem Lidera Logistyki ENGDocument3 pagesGLS Poland Z Tytuem Lidera Logistyki ENGFyikgfjijgNo ratings yet
- 11-001 Gergess Author Proof CorrectedDocument18 pages11-001 Gergess Author Proof CorrectedJamil JmlNo ratings yet
- H-330 Field Installation Manual IndexDocument11 pagesH-330 Field Installation Manual IndexRamon JimenezNo ratings yet
- AHRICertificateDocument1 pageAHRICertificaterenatosustentechNo ratings yet
- MCQ Ucmp Unit I Introduction and Mechanical Energy Based ProcessesDocument30 pagesMCQ Ucmp Unit I Introduction and Mechanical Energy Based ProcessesBollu SatyanarayanaNo ratings yet
- CSBA 2200, Peer Review TemplateDocument2 pagesCSBA 2200, Peer Review TemplateAlejandro BravoNo ratings yet