You might also like
- LabView TutorialDocument288 pagesLabView TutorialotavarezNo ratings yet
- Servo Drivers For Positioning Using Omron CP1L PLCDocument8 pagesServo Drivers For Positioning Using Omron CP1L PLCMinh DươngNo ratings yet
- Cam Total WarDocument142 pagesCam Total WarVienNgocQuangNo ratings yet
- Lee-Enfield Rifle RF Short MksI and II (II)Document4 pagesLee-Enfield Rifle RF Short MksI and II (II)VienNgocQuangNo ratings yet
- Test Strategy DocumentDocument10 pagesTest Strategy DocumentshahidJambagiNo ratings yet
- T-34 in Angola 1970s 1980s - WwiiafterwwiiDocument24 pagesT-34 in Angola 1970s 1980s - WwiiafterwwiiVienNgocQuang100% (1)
- Combinatorial Algorithms: For Computers and CalculatorsFrom EverandCombinatorial Algorithms: For Computers and CalculatorsRating: 4 out of 5 stars4/5 (2)
- Homework 05 NonlinearAdaptiveCtrl Semester2 AY2016-2017Document1 pageHomework 05 NonlinearAdaptiveCtrl Semester2 AY2016-2017VienNgocQuangNo ratings yet
- Homework 07 - NonlinearAdaptiveCtrl - Semester231 - TT01Document1 pageHomework 07 - NonlinearAdaptiveCtrl - Semester231 - TT01Khang Trà QuốcNo ratings yet
- Ee653 Midsem 2017Document2 pagesEe653 Midsem 2017Jivnesh SandhanNo ratings yet
- Indian Institute of Technology Kanpur Department of Electrical EngineeringDocument2 pagesIndian Institute of Technology Kanpur Department of Electrical EngineeringSasi TejaNo ratings yet
- 25SMC Tutorial 2Document6 pages25SMC Tutorial 2DIABLONo ratings yet
- NonlinearAdaptiveCtrl Final Exam 1st Semester 1920 SolutionDocument5 pagesNonlinearAdaptiveCtrl Final Exam 1st Semester 1920 SolutionVương Phước HoàngNo ratings yet
- Ee2255 - Digital Logic Circuits April-May 2010Document3 pagesEe2255 - Digital Logic Circuits April-May 2010kibrom atsbhaNo ratings yet
- May Jun 2015Document4 pagesMay Jun 2015ABC CheckNo ratings yet
- Model Predictive Control of Industrial ProcessesDocument33 pagesModel Predictive Control of Industrial ProcessesEnergya CorporacionNo ratings yet
- Nov Dec 2016Document4 pagesNov Dec 2016ABC CheckNo ratings yet
- Robust Track SMCDocument55 pagesRobust Track SMCsiddhartha gangulyNo ratings yet
- Ee304 ADocument3 pagesEe304 AAboo FarisNo ratings yet
- 16-EL-A2 - Novembre 2017 - Version AnglaiseDocument7 pages16-EL-A2 - Novembre 2017 - Version AnglaiseKahina ZitouniNo ratings yet
- 208SE Class Test Jan2019 Rev ADocument10 pages208SE Class Test Jan2019 Rev AMeowNo ratings yet
- IC6701 May 18 With KeyDocument14 pagesIC6701 May 18 With KeyAnonymous yO7rcec6vuNo ratings yet
- March 2022Document2 pagesMarch 2022Narmada BheemaNo ratings yet
- BDA 30703 Sem 1 1213 PDFDocument7 pagesBDA 30703 Sem 1 1213 PDFJevine LaiNo ratings yet
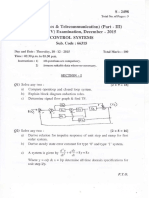
- CS Dec 15Document3 pagesCS Dec 15SAURABH BHISENo ratings yet
- Control System 2014 Midterm Exam. 1 (2 Pages, 38 Points in Total)Document7 pagesControl System 2014 Midterm Exam. 1 (2 Pages, 38 Points in Total)horace2005No ratings yet
- Ec363 Optimization Techniques, January 2022Document3 pagesEc363 Optimization Techniques, January 2022OptionsNo ratings yet
- (I) Assume N(S) 0 and Find The Transfer Function Y(s) /R(S) - (Ii) Assume R(S) 0 and Find The Transfer Function Y(s) /N(S)Document6 pages(I) Assume N(S) 0 and Find The Transfer Function Y(s) /R(S) - (Ii) Assume R(S) 0 and Find The Transfer Function Y(s) /N(S)Tehe SaglamNo ratings yet
- Ee 2005Document20 pagesEe 2005phoenix226No ratings yet
- Tutorial II DesignDocument4 pagesTutorial II Designgeofrey fungoNo ratings yet
- LinearDocument2 pagesLinearYee Jing TanNo ratings yet
- DSP Nec-011 - 2Document4 pagesDSP Nec-011 - 2Chhaya GroverNo ratings yet
- Tutorial 1 Questions - Tri 2 2015 2016Document1 pageTutorial 1 Questions - Tri 2 2015 2016Ch'ng KeatNo ratings yet
- May Jun 2016Document4 pagesMay Jun 2016ABC CheckNo ratings yet
- Chap 5Document57 pagesChap 5임종윤No ratings yet
- Btech Che 7 Sem Process Dynamics and Control g82 2020Document2 pagesBtech Che 7 Sem Process Dynamics and Control g82 2020NerdNo ratings yet
- KOM5102 Dig Cont Sys Mid1 Home April2016Document2 pagesKOM5102 Dig Cont Sys Mid1 Home April2016Sahin0% (1)
- HIL Implementation of Harmonic Drive Motor: RoboticsDocument12 pagesHIL Implementation of Harmonic Drive Motor: RoboticsEbd RahmanNo ratings yet
- LECTURE-SINGLE PHASE SYSTEM 5okDocument25 pagesLECTURE-SINGLE PHASE SYSTEM 5okAmmar RamanNo ratings yet
- EE472 - Control Theory II - Summer 2018 Homework 3 (Only Problems With Will Be Graded)Document2 pagesEE472 - Control Theory II - Summer 2018 Homework 3 (Only Problems With Will Be Graded)Hussain SalmanNo ratings yet
- Yeek07 2014 Iiib1 Iiib4Document38 pagesYeek07 2014 Iiib1 Iiib4LeungSiuYapNo ratings yet
- XI-IIT-IC & IR - CFTM-2 - 02 - 10 - 2023 Key & SolDocument8 pagesXI-IIT-IC & IR - CFTM-2 - 02 - 10 - 2023 Key & Soliitb.akkharcheNo ratings yet
- D4E - Simulink Tutorial 2 - 2019 Part1. Building SubsystemDocument1 pageD4E - Simulink Tutorial 2 - 2019 Part1. Building SubsystemIshmaiah Integral MwalwandaNo ratings yet
- rr322204 Digital and Optimal Control SystemsDocument8 pagesrr322204 Digital and Optimal Control SystemsSRINIVASA RAO GANTANo ratings yet
- Exercise 1 - Mathematical Model of SystemsDocument3 pagesExercise 1 - Mathematical Model of SystemsSampreeti MazumdarNo ratings yet
- Control Systems: GATE Objective & Numerical Type SolutionsDocument15 pagesControl Systems: GATE Objective & Numerical Type SolutionsFlat MateNo ratings yet
- Chapter 2 - v1sDocument97 pagesChapter 2 - v1sKiet Kuat KongNo ratings yet
- Exercise 3 LinearDocument5 pagesExercise 3 LinearWajih AbboudNo ratings yet
- One and A Half HoursDocument6 pagesOne and A Half HoursMHUM84No ratings yet
- Q G Q Q Q C Q Q M Q: Es La Variable de DesplazamientoDocument5 pagesQ G Q Q Q C Q Q M Q: Es La Variable de DesplazamientoJohn BeckerNo ratings yet
- SFWR ENG 4A03 Lab 1: Introduction To Labview and Review of Continuous Control SystemsDocument4 pagesSFWR ENG 4A03 Lab 1: Introduction To Labview and Review of Continuous Control Systemskaruneee7003No ratings yet
- Yt Yt Ut Ut: Adaptive Control Homework 05 Pole-Placement Design and Indirect STRDocument2 pagesYt Yt Ut Ut: Adaptive Control Homework 05 Pole-Placement Design and Indirect STRlaw0516No ratings yet
- APR2013P21Document63 pagesAPR2013P21qsashutoshNo ratings yet
- Electrical Engg 2005Document20 pagesElectrical Engg 2005chandrakanthNo ratings yet
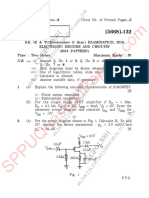
- Be - Electronics and Telecommunication Engineering - Semester 3 - 2019 - November - Electronic Devices and Circuits Edc Pattern 2015Document3 pagesBe - Electronics and Telecommunication Engineering - Semester 3 - 2019 - November - Electronic Devices and Circuits Edc Pattern 2015Lokesh DhakeNo ratings yet
- Problem Sheet On Discrete Time SystemDocument5 pagesProblem Sheet On Discrete Time SystemSourav PradhanNo ratings yet
- Prestige Institute of Engineering & Science Indore (M.P.)Document3 pagesPrestige Institute of Engineering & Science Indore (M.P.)SagarManjrekarNo ratings yet
- Taller Cuatro Análisis de SistemasDocument5 pagesTaller Cuatro Análisis de SistemasCarlosNo ratings yet
- Unit 6.4 and 6.5 HW KeyDocument4 pagesUnit 6.4 and 6.5 HW KeyOmar AshrafNo ratings yet
- Mathematical ModelDocument18 pagesMathematical Modelardius ebenezerNo ratings yet
- X X X P: G Y(s) R(S) E(s)Document1 pageX X X P: G Y(s) R(S) E(s)Yavuz KaplanNo ratings yet
- Digital Sheet SPC 512 Spring 2018Document10 pagesDigital Sheet SPC 512 Spring 2018AhmedNo ratings yet
- RegelTechniek1 2014Document3 pagesRegelTechniek1 2014John AppleseedNo ratings yet
- HT TP: //qpa Pe R.W But .Ac .In: 2012 Control System-IDocument7 pagesHT TP: //qpa Pe R.W But .Ac .In: 2012 Control System-Ipaku deyNo ratings yet
- Cim 101 PDFDocument7 pagesCim 101 PDFpaku deyNo ratings yet
- Solving Partial Differential Equation Applications with PDE2DFrom EverandSolving Partial Differential Equation Applications with PDE2DNo ratings yet
- c10lp Eval A1 SCHDocument56 pagesc10lp Eval A1 SCHVienNgocQuangNo ratings yet
- E911 Provisioning System Software Test Plan (STP)Document11 pagesE911 Provisioning System Software Test Plan (STP)VienNgocQuangNo ratings yet
- ch2 PDFDocument6 pagesch2 PDFVienNgocQuangNo ratings yet
- To Opencv: Marvin SmithDocument29 pagesTo Opencv: Marvin SmithVienNgocQuang100% (1)
- Industrial Sensors (Electromagnetic Flowmeter, Density (Consistency) Meter, Pressure Transmitter and Water Treatment Analyzer)Document1 pageIndustrial Sensors (Electromagnetic Flowmeter, Density (Consistency) Meter, Pressure Transmitter and Water Treatment Analyzer)VienNgocQuangNo ratings yet
- Nikolaidis Pitas - Facial Feature Extraction and Pose DeterminationDocument20 pagesNikolaidis Pitas - Facial Feature Extraction and Pose DeterminationVienNgocQuangNo ratings yet
- MP 3Document3 pagesMP 3VienNgocQuangNo ratings yet
- MP 2Document3 pagesMP 2VienNgocQuangNo ratings yet
- Vietnam National University, HCMC Socialist Republic of Vietnam University of Technology Independence - Freedom - HappinessDocument2 pagesVietnam National University, HCMC Socialist Republic of Vietnam University of Technology Independence - Freedom - HappinessVienNgocQuangNo ratings yet
- Angle Iload Uload IsDocument10 pagesAngle Iload Uload IsVienNgocQuangNo ratings yet
- Man Magnum 303 Special Edition 2015 New PreviewDocument5 pagesMan Magnum 303 Special Edition 2015 New PreviewVienNgocQuangNo ratings yet
- TOSHIBA Global Internship 2018 - Application Guidelines & Position ListDocument17 pagesTOSHIBA Global Internship 2018 - Application Guidelines & Position ListVienNgocQuangNo ratings yet
- Industrial Robots: Serve For Patients Monitoring and Assistance While Others PerformsDocument6 pagesIndustrial Robots: Serve For Patients Monitoring and Assistance While Others PerformsVienNgocQuangNo ratings yet
- Man Magnum April 2018 PreviewDocument5 pagesMan Magnum April 2018 PreviewVienNgocQuangNo ratings yet
- Thesis Report - Date: April 5th 2018 Forward and Inverse Kinematics of 3 Revolution-Joint Robotic ArmDocument7 pagesThesis Report - Date: April 5th 2018 Forward and Inverse Kinematics of 3 Revolution-Joint Robotic ArmVienNgocQuangNo ratings yet
- VBScriptDocument120 pagesVBScriptdhanaji jondhaleNo ratings yet
- IEEE'S STD - LOGIC - 1164 Quick Reference CardDocument2 pagesIEEE'S STD - LOGIC - 1164 Quick Reference CardILikeScribd5050No ratings yet
- MLS 205 Synopsis DraftDocument6 pagesMLS 205 Synopsis Draftshabnam naazNo ratings yet
- Skills For Employment Investment Project (SEIP) : Standards/ Curriculum Format For Graphics DesignDocument10 pagesSkills For Employment Investment Project (SEIP) : Standards/ Curriculum Format For Graphics DesignSun SetNo ratings yet
- WinForms TrueDBGridDocument362 pagesWinForms TrueDBGridgusvader100% (1)
- DBMS Lab 6Document2 pagesDBMS Lab 6niit ctsNo ratings yet
- S.M. Haseeb Mail: Haseeb - Ishaqui2000@yahoo - Com Mobile # 9642559804Document2 pagesS.M. Haseeb Mail: Haseeb - Ishaqui2000@yahoo - Com Mobile # 9642559804Luis HunterNo ratings yet
- Telecallers Candidate Profile For Fresher and ExperiencedDocument6 pagesTelecallers Candidate Profile For Fresher and ExperiencedNandita ThukralNo ratings yet
- MB Memory Ga g41m ComboDocument2 pagesMB Memory Ga g41m Combonotsure1No ratings yet
- BIM Roadmap - Cheng Tai FattDocument33 pagesBIM Roadmap - Cheng Tai Fattusernaga84No ratings yet
- 55101-mt - Design and Analysis of AlgorithmsDocument2 pages55101-mt - Design and Analysis of AlgorithmsSRINIVASA RAO GANTANo ratings yet
- Progress ReportDocument7 pagesProgress Reportaksh_teddyNo ratings yet
- NotesDocument18 pagesNotesnagalaxmi88% (8)
- EPON ONU EONU-04W Datasheet V1Document4 pagesEPON ONU EONU-04W Datasheet V1Andres Alberto ParraNo ratings yet
- ANSYS, Inc. Known Issues and LimitationsDocument28 pagesANSYS, Inc. Known Issues and Limitationsapple.scotch.fool3550No ratings yet
- 01 Intelligent Systems-IntroductionDocument82 pages01 Intelligent Systems-Introduction1balamanianNo ratings yet
- Richard E. Korf, Peter Schultze-Large-Scale Parallel Breadth-First Search-AAAI Proceedings 2005 (2005) PDFDocument6 pagesRichard E. Korf, Peter Schultze-Large-Scale Parallel Breadth-First Search-AAAI Proceedings 2005 (2005) PDFnewreaderNo ratings yet
- Getting Started With SPC For Excel PDFDocument70 pagesGetting Started With SPC For Excel PDFThang PhamNo ratings yet
- Sub Engineer Test Model PaperDocument8 pagesSub Engineer Test Model PaperZeeshan AhmadNo ratings yet
- Cisco UCS To Brocade Connectivity Guide: White PaperDocument33 pagesCisco UCS To Brocade Connectivity Guide: White Paper5songNo ratings yet
- Raghavendra Rao: Sap-Abap/4 ConsultantDocument3 pagesRaghavendra Rao: Sap-Abap/4 ConsultantKapil SharmaNo ratings yet
- DS - Unit 3 (PPT 1.1)Document18 pagesDS - Unit 3 (PPT 1.1)19BCA1099PUSHP RAJNo ratings yet
- E-Commerce and ASEAN Economic IntegrationDocument51 pagesE-Commerce and ASEAN Economic IntegrationDiwan EztheimNo ratings yet
- The Adventures of Robinson CrusoeDocument495 pagesThe Adventures of Robinson CrusoeBozica Zeljko MicanovicNo ratings yet
- 62 60599 01Document44 pages62 60599 01HoussemTunisinoNo ratings yet
- Smpte Made SimpleDocument46 pagesSmpte Made Simplethared33No ratings yet
- Tecnotree Services DatasheetDocument2 pagesTecnotree Services Datasheetjhtan84No ratings yet