You might also like
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- DC Motor DrivesDocument53 pagesDC Motor DrivesManoj NNo ratings yet
- EEE373 Electric Motor Drive Lecture 12Document20 pagesEEE373 Electric Motor Drive Lecture 12Moaz ShafiNo ratings yet
- 1 Introduction To Electrical Drive SystemsDocument30 pages1 Introduction To Electrical Drive Systemsngobi25eddyNo ratings yet
- 3.control of Electrical DrivesDocument17 pages3.control of Electrical DrivesSimbarashe ChitsungeNo ratings yet
- Fall 01 AnalogDocument10 pagesFall 01 AnalogAshik AhmedNo ratings yet
- DC Drives 2022 Copy UpdatedDocument49 pagesDC Drives 2022 Copy UpdatedAzmi Shah Alias KhooNo ratings yet
- Lecture 5-VAR GenerationDocument74 pagesLecture 5-VAR GenerationSidharth MishraNo ratings yet
- Jabalpur Engineering College, Jabalpur Electrical Engineering Department AC/DC Drives Lab. List of ExperimentDocument63 pagesJabalpur Engineering College, Jabalpur Electrical Engineering Department AC/DC Drives Lab. List of ExperimentSajalNo ratings yet
- Exp 3Document6 pagesExp 3Dinesh ReddyNo ratings yet
- DC DrivesDocument91 pagesDC DrivesferdiNo ratings yet
- College of Engineering, Ambajogai.: Unit Ii Control of Electrical Drives Unit Ii Control of Electrical DrivesDocument27 pagesCollege of Engineering, Ambajogai.: Unit Ii Control of Electrical Drives Unit Ii Control of Electrical Driveslvb123No ratings yet
- Brushless DC Motor Operation ExplainedDocument23 pagesBrushless DC Motor Operation ExplainedkewalNo ratings yet
- Report On Workshop: Submitted byDocument54 pagesReport On Workshop: Submitted byrajimuruganNo ratings yet
- Electric Traction RailwaysDocument34 pagesElectric Traction Railwayssaurabh8435100% (1)
- Speed Control of DC Motor Using PDocument22 pagesSpeed Control of DC Motor Using PAnanth Sai YadavNo ratings yet
- Direct Power Control of PWM Converter Without Power Source VoltaDocument6 pagesDirect Power Control of PWM Converter Without Power Source Voltabalaji mendiNo ratings yet
- 6 Lab: Motor Constants: 6.1 PrelabDocument4 pages6 Lab: Motor Constants: 6.1 Prelabkrish3291No ratings yet
- Power Electronics - Chapter 8Document37 pagesPower Electronics - Chapter 8Mohamed ElgeziryNo ratings yet
- 7.0 Expt - No - 07Document4 pages7.0 Expt - No - 07yashkhatpe.sit.electNo ratings yet
- Fast PWM Mode. DC Motor. Servo MotorDocument21 pagesFast PWM Mode. DC Motor. Servo MotorAya Adel Gouma AbdElGaidNo ratings yet
- Ac Voltage ControllerDocument17 pagesAc Voltage ControllertinashechiveroNo ratings yet
- Topic 5 AC To AC ConverterDocument53 pagesTopic 5 AC To AC ConverterNorain ZakariaNo ratings yet
- Design of Control Systems: Case StudiesDocument35 pagesDesign of Control Systems: Case StudiesRaf IsmailNo ratings yet
- 2 Machine LabDocument4 pages2 Machine LabManoj GuptaNo ratings yet
- DC Motor Drives (Compatibility Mode)Document63 pagesDC Motor Drives (Compatibility Mode)Anuar NuafzanNo ratings yet
- EET 421 POWER ELECTRONIC DRIVESDocument48 pagesEET 421 POWER ELECTRONIC DRIVESaswardi8756No ratings yet
- F10 Feedback Control SystemsDocument13 pagesF10 Feedback Control SystemsAlyssonAlmeidaNo ratings yet
- Intro to DC Motor Drives: Thyristor and PWM Converter CircuitsDocument52 pagesIntro to DC Motor Drives: Thyristor and PWM Converter CircuitsMak YabuNo ratings yet
- Speed Control of DC Motor Using Pulse Width ModulationDocument23 pagesSpeed Control of DC Motor Using Pulse Width Modulationarnav060419891190No ratings yet
- Diagnostic Sales Evening Component TestingDocument124 pagesDiagnostic Sales Evening Component TestingbibNo ratings yet
- DC Drives Chopper Basedfinal 503039 503026Document39 pagesDC Drives Chopper Basedfinal 503039 503026Mohamed ElgeziryNo ratings yet
- Operational Transconductance Amplifier (OTA) : Op-Amp ApplicationsDocument28 pagesOperational Transconductance Amplifier (OTA) : Op-Amp ApplicationsJay ReposoNo ratings yet
- Loadflow PanelDocument31 pagesLoadflow PanelVasudevan KunjithapathamNo ratings yet
- Turbine-Less Ducted Fan Jet Engine: Subsonic PropulsionDocument25 pagesTurbine-Less Ducted Fan Jet Engine: Subsonic PropulsionزهديابوانسNo ratings yet
- Signal conditioning: Voltage to current, current to voltage convertersDocument30 pagesSignal conditioning: Voltage to current, current to voltage convertersAsfa Eka PrasetyaNo ratings yet
- Motion Control Engineering: Author: Tran CauDocument35 pagesMotion Control Engineering: Author: Tran CauLê Quốc ViệtNo ratings yet
- T3000Document12 pagesT3000Prashant Ramesh BurhadeNo ratings yet
- Technical References: System ElementsDocument4 pagesTechnical References: System ElementsHoang NguyenNo ratings yet
- Behnam Pres Buck 93-11-13Document180 pagesBehnam Pres Buck 93-11-13behzad1031No ratings yet
- Direct Load Test On A DC Shunt MotorDocument5 pagesDirect Load Test On A DC Shunt MotorYAKALA RAVIKUMARNo ratings yet
- E P A - R C: Lectrónica DE Otencia Y Rmónicos Ectificador OntroladoDocument26 pagesE P A - R C: Lectrónica DE Otencia Y Rmónicos Ectificador OntroladoDorian RojasNo ratings yet
- Closed Loop Control NewDocument47 pagesClosed Loop Control NewDr.K.Krishna Veni ProfessorNo ratings yet
- Electric Drives Components and OperationDocument41 pagesElectric Drives Components and OperationRaja SekaranNo ratings yet
- M6 - C3 - Lesson 1 - System DevelopmentDocument34 pagesM6 - C3 - Lesson 1 - System DevelopmentsanthoshyeruvakaNo ratings yet
- Lecture 5 - PeripheralsDocument29 pagesLecture 5 - PeripheralsGelantuNo ratings yet
- EE 109 Unit 10 - Pulse Width ModulationDocument16 pagesEE 109 Unit 10 - Pulse Width ModulationEmin KültürelNo ratings yet
- RWE Erickson Guide to Single-Phase Solar InvertersDocument27 pagesRWE Erickson Guide to Single-Phase Solar Invertersselaroth168No ratings yet
- Ps Lab ManualDocument132 pagesPs Lab ManualRamkrishnaNo ratings yet
- Static Relays: Advantages, Applications and TypesDocument24 pagesStatic Relays: Advantages, Applications and TypesifaNo ratings yet
- Ac Servo MotorDocument14 pagesAc Servo MotorJeyanthNo ratings yet
- Assembling and Testing a Cumulative Compound DC MotorDocument11 pagesAssembling and Testing a Cumulative Compound DC MotorSalman Muneer AhmedNo ratings yet
- Experiment NO. 5: Characteristics of a DC Series MotorDocument5 pagesExperiment NO. 5: Characteristics of a DC Series MotorKlydeJoseNo ratings yet
- Speed Control of DC Motor Using Pulse Width ModulationDocument30 pagesSpeed Control of DC Motor Using Pulse Width ModulationRatul SarkarNo ratings yet
- Electrical Drives: Dr. Magdi A. Mosa Electrical Power and Machines Department Faculty of Engineering - Helwan UniversityDocument27 pagesElectrical Drives: Dr. Magdi A. Mosa Electrical Power and Machines Department Faculty of Engineering - Helwan UniversityOmar ZamalkawyNo ratings yet
- Control BLDC MotorsDocument5 pagesControl BLDC MotorsVasu SureshNo ratings yet
- Testtg: Re AyDocument7 pagesTesttg: Re Aysooraj r NairNo ratings yet
- Digital Voltmeter (DVM)Document10 pagesDigital Voltmeter (DVM)Awais RazaNo ratings yet
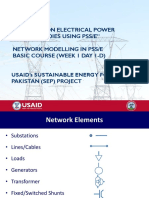
- W-1-Day-1-D - Network Modelling in PSSEDocument31 pagesW-1-Day-1-D - Network Modelling in PSSEKASHIF67% (3)
- Processing of Polypropylene Spheri Glass 3000 Nanocomposi 2016 Procedia TecDocument8 pagesProcessing of Polypropylene Spheri Glass 3000 Nanocomposi 2016 Procedia TecTanNguyễnNo ratings yet
- Comparison of Two Different Rapid Prototyping System Based On 2016 ProcediaDocument8 pagesComparison of Two Different Rapid Prototyping System Based On 2016 ProcediaTanNguyễnNo ratings yet
- Weighted Guided Gaussian Single Image Dehazing 2016 Procedia TechnologyDocument9 pagesWeighted Guided Gaussian Single Image Dehazing 2016 Procedia TechnologyTanNguyễnNo ratings yet
- A Simulation Based Study of Flow Velocities Across Cross FL 2016 Procedia TeDocument8 pagesA Simulation Based Study of Flow Velocities Across Cross FL 2016 Procedia TeTanNguyễnNo ratings yet
- Experimental and Theoretical Investigations in ECDM Proc 2016 Procedia TechnDocument8 pagesExperimental and Theoretical Investigations in ECDM Proc 2016 Procedia TechnTanNguyễnNo ratings yet
- A Plagiarism Detection System For Malayalam Text Based Doc 2016 Procedia TecDocument6 pagesA Plagiarism Detection System For Malayalam Text Based Doc 2016 Procedia TecTanNguyễnNo ratings yet
- Training Basic HydraulicsDocument50 pagesTraining Basic Hydraulicssalicurri88% (8)
- Conceptualization and Design of An Efficient Groundwater Re 2016 Procedia TeDocument8 pagesConceptualization and Design of An Efficient Groundwater Re 2016 Procedia TenguyennguyenNo ratings yet
- Processing of Polypropylene Spheri Glass 3000 Nanocomposi 2016 Procedia TecDocument8 pagesProcessing of Polypropylene Spheri Glass 3000 Nanocomposi 2016 Procedia TecTanNguyễnNo ratings yet
- Variable Step Size For Improving Convergence of FXLMS 2016 Procedia TechnolDocument7 pagesVariable Step Size For Improving Convergence of FXLMS 2016 Procedia TechnolTanNguyễnNo ratings yet
- Design of Low Noise Amplifier For IEEE Standard 802 11b Usi 2016 Procedia TeDocument7 pagesDesign of Low Noise Amplifier For IEEE Standard 802 11b Usi 2016 Procedia TeTanNguyễnNo ratings yet
- Where AES Is For Internet SIMON Could Be For IoT 2016 Procedia TechnologyDocument8 pagesWhere AES Is For Internet SIMON Could Be For IoT 2016 Procedia TechnologyTanNguyễnNo ratings yet
- A Review On Abrasive Flow Machining AFM 2016 Procedia TechnologyDocument8 pagesA Review On Abrasive Flow Machining AFM 2016 Procedia TechnologyTanNguyễnNo ratings yet
- A Novel Approach To Brain Biometric User Recognition 2016 Procedia TechnologDocument8 pagesA Novel Approach To Brain Biometric User Recognition 2016 Procedia TechnologTanNguyễnNo ratings yet
- Design and Implementation of Double Precision Floating P 2016 Procedia TechnDocument8 pagesDesign and Implementation of Double Precision Floating P 2016 Procedia TechnTanNguyễnNo ratings yet
- DC Motor CircuitsDocument28 pagesDC Motor CircuitsRob CookNo ratings yet
- Application of Artificial Intelligence Approach in Modeling 2016 Procedia TDocument10 pagesApplication of Artificial Intelligence Approach in Modeling 2016 Procedia TtannguyenvanNo ratings yet
- Model Predictive Control For Process Flow Application Using LabviewDocument6 pagesModel Predictive Control For Process Flow Application Using LabviewTanNguyễnNo ratings yet
- Computational Study of Hypersonic Flow Past Spiked Blunt B 2016 Procedia TecDocument8 pagesComputational Study of Hypersonic Flow Past Spiked Blunt B 2016 Procedia TecTanNguyễnNo ratings yet
- A Survey On Dispersion Management Using Optical Solitons I 2016 Procedia TecDocument8 pagesA Survey On Dispersion Management Using Optical Solitons I 2016 Procedia TecTanNguyễnNo ratings yet
- A Study On Preventing Node Isolation Attack in OLSR PR 2016 Procedia TechnolDocument7 pagesA Study On Preventing Node Isolation Attack in OLSR PR 2016 Procedia TechnolTanNguyễnNo ratings yet
- A Novel Approach For Detection of Single and Collaborative 2016 Procedia TecDocument8 pagesA Novel Approach For Detection of Single and Collaborative 2016 Procedia TecTanNguyễnNo ratings yet
- A Novel Approach For Detection of Single and Collaborative 2016 Procedia TecDocument8 pagesA Novel Approach For Detection of Single and Collaborative 2016 Procedia TecTanNguyễnNo ratings yet
- Ameliorating Heat Transfer Performance of Absorber Tube Fo 2016 Procedia TecDocument10 pagesAmeliorating Heat Transfer Performance of Absorber Tube Fo 2016 Procedia TecTanNguyễnNo ratings yet
- A Plagiarism Detection System For Malayalam Text Based Doc 2016 Procedia TecDocument6 pagesA Plagiarism Detection System For Malayalam Text Based Doc 2016 Procedia TecTanNguyễnNo ratings yet
- A New Cryptographic Key Generation Scheme Using Psychol 2016 Procedia TechnoDocument7 pagesA New Cryptographic Key Generation Scheme Using Psychol 2016 Procedia TechnoTanNguyễnNo ratings yet
- An Efficient Privacy Preserving Search Scheme With Access 2016 Procedia TecDocument8 pagesAn Efficient Privacy Preserving Search Scheme With Access 2016 Procedia TecTanNguyễnNo ratings yet
- An Intelligent Speed Controller Design For Indirect Vector 2016 Procedia TeDocument7 pagesAn Intelligent Speed Controller Design For Indirect Vector 2016 Procedia TeTanNguyễnNo ratings yet
- A Methodology For Spatial Domain Image Compression Based 2016 Procedia TechnDocument8 pagesA Methodology For Spatial Domain Image Compression Based 2016 Procedia TechnTanNguyễnNo ratings yet
- MPPT Algorithm PDFDocument8 pagesMPPT Algorithm PDFakilaNo ratings yet
- 1280-060 DatasheetDocument43 pages1280-060 DatasheetRamesh RautNo ratings yet
- ETH-2 For Compact/Modular 3rd Generation PSS: Operating Manual - Item No. 21140-EN-04Document72 pagesETH-2 For Compact/Modular 3rd Generation PSS: Operating Manual - Item No. 21140-EN-04RUBENNo ratings yet
- CD2000 Drive ManualDocument106 pagesCD2000 Drive ManualAdvance Engineering ShoaibNo ratings yet
- Service Manual TV Lg42px4rvh EnglishDocument37 pagesService Manual TV Lg42px4rvh EnglishRc Uno UnoNo ratings yet
- Triple Junction GaAsDocument2 pagesTriple Junction GaAsNezar Gassem ElfadillNo ratings yet
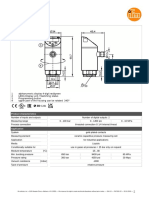
- PN7092 Pressure Sensor DisplayDocument5 pagesPN7092 Pressure Sensor DisplayEslam YehiaNo ratings yet
- 800xa Outline - IO Systems - S800 IODocument20 pages800xa Outline - IO Systems - S800 IOKourosh52No ratings yet
- Designing a Power Supply: A Project ReportDocument31 pagesDesigning a Power Supply: A Project Reportpriyanka sarmahNo ratings yet
- Design of A Seamless Gateway For Mechatrolink : Abstract-Recently, The Real-Time Ethernet Based Protocol HasDocument6 pagesDesign of A Seamless Gateway For Mechatrolink : Abstract-Recently, The Real-Time Ethernet Based Protocol Hasvinhpo51290No ratings yet
- PLL 2164Document24 pagesPLL 2164Benjamín Varela UmbralNo ratings yet
- LAPORAN PRAKTIKUM ELEKTRONIKA DASAR 1Document25 pagesLAPORAN PRAKTIKUM ELEKTRONIKA DASAR 1assaNo ratings yet
- s66698 138URecPrtrDocument36 pagess66698 138URecPrtrPeter SamuelNo ratings yet
- Microwave Link Design - Nueva EcijaDocument79 pagesMicrowave Link Design - Nueva EcijaMark Vincent Fortaleza55% (11)
- Here Is How To Reflash CARPROG Mcu AT91SAM7S256 Step by StepDocument9 pagesHere Is How To Reflash CARPROG Mcu AT91SAM7S256 Step by StepManuel SuarezNo ratings yet
- Design of Sensor Nodes in Underwater Sensor Networks: Yu Yang, Zhang Xiaomin, Peng BO, Fu YujingDocument5 pagesDesign of Sensor Nodes in Underwater Sensor Networks: Yu Yang, Zhang Xiaomin, Peng BO, Fu Yujinghari9923No ratings yet
- DSP Processor and ArchitectureDocument45 pagesDSP Processor and ArchitectureAlemayehu AsmareNo ratings yet
- Product data sheet SSP02EMA24DDocument2 pagesProduct data sheet SSP02EMA24DEliezer BrinfudNo ratings yet
- LTE FDD Cluster DT - Analysis ReportDocument23 pagesLTE FDD Cluster DT - Analysis ReportAnonymous 0d9mC0OaxENo ratings yet
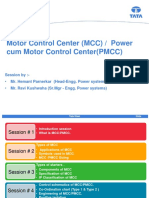
- 1 - PPT For MCC For Aets 2017Document50 pages1 - PPT For MCC For Aets 2017Harleen KaurNo ratings yet
- Fundamentals of Electrical Drives SystemsDocument14 pagesFundamentals of Electrical Drives SystemsyaredNo ratings yet
- E&I InterfaceDocument21 pagesE&I Interfacechandakbera100% (2)
- DRX and RSSIDocument12 pagesDRX and RSSIMohammad SoleimaniNo ratings yet
- AVA 33 Voltage Operated Auxiliary Relay (3 Elements) With HR ContactsDocument1 pageAVA 33 Voltage Operated Auxiliary Relay (3 Elements) With HR ContactsKunjan DalwadiNo ratings yet
- Ideal AutotransformerDocument10 pagesIdeal AutotransformerBT21EE017 Gulshan RajNo ratings yet
- 354 39 Solutions Instructor Manual 11 Hardware Features 8051 Chapter 11Document8 pages354 39 Solutions Instructor Manual 11 Hardware Features 8051 Chapter 11Saravanan JayabalanNo ratings yet
- Comparing signals with comparatorsDocument4 pagesComparing signals with comparatorswojakNo ratings yet
- ASUS ROG RAMPAGE VI EXTREME ENCORE MANUAL Compressed PDFDocument116 pagesASUS ROG RAMPAGE VI EXTREME ENCORE MANUAL Compressed PDFchenchozarangolloNo ratings yet
- Benefits of Preventive Maintenance PDFDocument19 pagesBenefits of Preventive Maintenance PDFGlendonNo ratings yet
- UNIT 3 Fourier Series Symmetry Properties Questions and Answers - Sanfoundry PDFDocument3 pagesUNIT 3 Fourier Series Symmetry Properties Questions and Answers - Sanfoundry PDFzohaibNo ratings yet