You might also like
- Build A Large Ultrasonic CleanerDocument2 pagesBuild A Large Ultrasonic Cleanerss84540No ratings yet
- E-Type Tabletop Ultrasonic Cleaning SystemsDocument4 pagesE-Type Tabletop Ultrasonic Cleaning SystemsSonix IV CorporationNo ratings yet
- Ultrasonic GeneratorDocument2 pagesUltrasonic GeneratorMuhammad Janif0% (1)
- Branson Ultrasonic Cleaner 2510 PDFDocument36 pagesBranson Ultrasonic Cleaner 2510 PDFShrikant PandeyNo ratings yet
- Toyocom Cristal OscillatorsDocument58 pagesToyocom Cristal Oscillatorsb33g33100% (1)
- FADOS9F1 English Datasheet Long PDFDocument8 pagesFADOS9F1 English Datasheet Long PDFRichard ZerpaNo ratings yet
- Rechner s10 268 553 01 Heidenhain ManualDocument752 pagesRechner s10 268 553 01 Heidenhain ManualDaniel SchuchNo ratings yet
- Emersonpower CatalogDocument64 pagesEmersonpower CatalogManuel Rengifo RiveroNo ratings yet
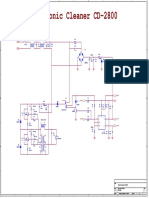
- Ultrasonic Cleaner cd2800 PDFDocument1 pageUltrasonic Cleaner cd2800 PDFAdamNo ratings yet
- MICROCONTROLLER-based DC Motor Speed ControllerDocument8 pagesMICROCONTROLLER-based DC Motor Speed Controllerranjithsim100% (1)
- Aa094.101.05 - Conveyor Belt With Brush DC Motor Dunker Drive CanDocument8 pagesAa094.101.05 - Conveyor Belt With Brush DC Motor Dunker Drive CanplacintaruNo ratings yet
- Datasheet PDFDocument6 pagesDatasheet PDFsithulibraNo ratings yet
- ET3100 BioFlex TimeClockDocument11 pagesET3100 BioFlex TimeClockJack OliverNo ratings yet
- Rfid Based Security System: A Project ReportDocument22 pagesRfid Based Security System: A Project ReportHeartin HariNo ratings yet
- Static Stabilizer Single Phase User ManualDocument15 pagesStatic Stabilizer Single Phase User ManualPankaj D PatelNo ratings yet
- 21 Toma EmanoilDocument6 pages21 Toma EmanoilFredy Peñafiel PazNo ratings yet
- Arc Welding Transformer Upto 400 AmpsDocument5 pagesArc Welding Transformer Upto 400 AmpsPrabhakar Kattula100% (1)
- Altivar 312 - ATV312H075N4Document4 pagesAltivar 312 - ATV312H075N4Jose Norton Doria100% (1)
- Oxygen Analyzer Man - 3300tbDocument43 pagesOxygen Analyzer Man - 3300tbAhmed HebesheNo ratings yet
- Single Phase Inverter With Pi ControllerDocument12 pagesSingle Phase Inverter With Pi ControllerNimish SharmaNo ratings yet
- Arduino Energy Monitoring: Jack's PhilliesDocument35 pagesArduino Energy Monitoring: Jack's PhilliesCristele Mae GarciaNo ratings yet
- Linear Variable Displacement Transducer (LVDT)Document3 pagesLinear Variable Displacement Transducer (LVDT)SE ElectricalNo ratings yet
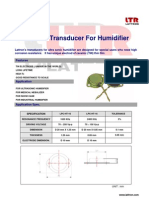
- Piezo HumidifierDocument2 pagesPiezo HumidifierRoberto M. SousaNo ratings yet
- Power Supply Trainer Using Lm723 IcDocument8 pagesPower Supply Trainer Using Lm723 IcDinesh Kumar MehraNo ratings yet
- Contactless Energy Transfer: Deepshikha MEL-194-2K9 M.Tech 2nd Sem (Power System & Drives)Document17 pagesContactless Energy Transfer: Deepshikha MEL-194-2K9 M.Tech 2nd Sem (Power System & Drives)shiks16100% (1)
- ADCMT TR8652 ElectrometerDocument4 pagesADCMT TR8652 Electrometerbudi0251No ratings yet
- Counter Applications PDFDocument3 pagesCounter Applications PDFghanNo ratings yet
- Data Sheet FLC 100Document2 pagesData Sheet FLC 100Ömer Vehbe100% (1)
- 5-Comparision Festo - Electrical Vs PneumaticDocument67 pages5-Comparision Festo - Electrical Vs PneumaticDonneil Frederiche Ong YabutNo ratings yet
- Booster Vba Vbat D EuDocument20 pagesBooster Vba Vbat D EuCarlos Andres Rodriguez SolarteNo ratings yet
- C-Power 02052013Document31 pagesC-Power 02052013Nikhil SinghNo ratings yet
- Communication Selection GuideDocument24 pagesCommunication Selection GuideIrwan FarobiNo ratings yet
- AI 210 InstrumentationDocument61 pagesAI 210 InstrumentationBurhan KhanNo ratings yet
- PPTDocument23 pagesPPTSankeerthana GadeNo ratings yet
- 3-En2200-B - 4VP01Document15 pages3-En2200-B - 4VP01najafali1No ratings yet
- SIDEROS - Dust CollectorsDocument2 pagesSIDEROS - Dust CollectorsDaniel Austin100% (1)
- Speed Control of DC Motor Using ChopperDocument7 pagesSpeed Control of DC Motor Using ChopperKoustav DasguptaNo ratings yet
- Best PneumaticsDocument16 pagesBest PneumaticsAshok DevarajNo ratings yet
- Estabilizador Voltage ChopperDocument52 pagesEstabilizador Voltage ChopperArmandinho CaveroNo ratings yet
- InstrumentationDocument61 pagesInstrumentationHarish YNo ratings yet
- RPMDocument3 pagesRPMLeonard AntelizNo ratings yet
- Dishwasher Uisng PLC: Dr. B. Prasada RaoDocument9 pagesDishwasher Uisng PLC: Dr. B. Prasada RaoSai VamsiNo ratings yet
- Semi - Automatic Coil Winding MachineDocument3 pagesSemi - Automatic Coil Winding Machinemohiuddin_dhkNo ratings yet
- LVDT - Syed MatahirDocument9 pagesLVDT - Syed MatahirHamoodNo ratings yet
- Effect of Current On EDMDocument58 pagesEffect of Current On EDMAli M. ElghawailNo ratings yet
- Antena Bomer 4 ElemenDocument2 pagesAntena Bomer 4 ElemenAudi MirantiNo ratings yet
- Snubber CircuitDocument4 pagesSnubber Circuitbalaeee123100% (1)
- Monitoring, Controlling and Protection of RF Based Wireless Automatic Water Tank Level ControllerDocument8 pagesMonitoring, Controlling and Protection of RF Based Wireless Automatic Water Tank Level ControllerDipak GayakwadNo ratings yet
- P. Peng - TofflonDocument38 pagesP. Peng - Tofflon이규호No ratings yet
- Lab Manual 20100728Document320 pagesLab Manual 20100728Kuro070% (1)
- Fisher Scientific Operator's Manual Tabletop Ultrasonic CleanersDocument25 pagesFisher Scientific Operator's Manual Tabletop Ultrasonic CleanersLuciano Augusto Gerling GarzaNo ratings yet
- Code Configuration Guide Final1Document34 pagesCode Configuration Guide Final1Than MaungNo ratings yet
- Water LevelDocument36 pagesWater LevelPreet ChahalNo ratings yet
- MSR131 Troubleshooting Guide Rev C PDFDocument22 pagesMSR131 Troubleshooting Guide Rev C PDFmhafizanNo ratings yet
- Ultrasonic Sensor - Wikipedia, The Free EncyclopediaDocument3 pagesUltrasonic Sensor - Wikipedia, The Free Encyclopediamuna222No ratings yet
- IoT Based Water Management System Using Arduino PDFDocument3 pagesIoT Based Water Management System Using Arduino PDFgraveNo ratings yet
- Automatic Bottle Washing Machine-NewDocument5 pagesAutomatic Bottle Washing Machine-Newsathish kumarNo ratings yet
- Cifelli Ed 1996Document41 pagesCifelli Ed 1996Bogdan HaiducNo ratings yet
- Sheffield Edge Tool MakersDocument48 pagesSheffield Edge Tool MakersnikkicluNo ratings yet
- Mammalian Teeth 03 Schulz KornasDocument10 pagesMammalian Teeth 03 Schulz KornasBogdan HaiducNo ratings yet
- European Neogene Mammal ChronologyDocument9 pagesEuropean Neogene Mammal ChronologyBogdan HaiducNo ratings yet
- The History of Mesowear - A Review, Ackermans 2020Document17 pagesThe History of Mesowear - A Review, Ackermans 2020Bogdan HaiducNo ratings yet
- Kelley & Gao (2012) PNAS - Yuanmou Cranium PDFDocument4 pagesKelley & Gao (2012) PNAS - Yuanmou Cranium PDFBogdan HaiducNo ratings yet
- Tooth Wear As A Means To Quantify Intra-Specific Variations in Diet and Chewing Movements - Calandra Et Al 2016Document10 pagesTooth Wear As A Means To Quantify Intra-Specific Variations in Diet and Chewing Movements - Calandra Et Al 2016Bogdan HaiducNo ratings yet
- Haiduc Et Al. 2018Document8 pagesHaiduc Et Al. 2018Bogdan HaiducNo ratings yet
- Gr. Cobalcescu Annual Scientific Symposium - en 2019Document2 pagesGr. Cobalcescu Annual Scientific Symposium - en 2019Bogdan HaiducNo ratings yet
- Dental Microwear Texture Analysis: Technical ConsiderationsDocument11 pagesDental Microwear Texture Analysis: Technical ConsiderationsBogdan HaiducNo ratings yet
- Evolution and Palaeobiology of PterosaursDocument2 pagesEvolution and Palaeobiology of PterosaursBogdan HaiducNo ratings yet
- Tooth Wear As A Means To Quantify Intra-Specific Variations in Diet and Chewing Movements - Calandra Et Al 2016Document10 pagesTooth Wear As A Means To Quantify Intra-Specific Variations in Diet and Chewing Movements - Calandra Et Al 2016Bogdan HaiducNo ratings yet
- PastmanualDocument205 pagesPastmanualSheetal BhosaleNo ratings yet
- Paleoenvironment in East Java During The Last 25,000 Years As Inferred From Bovid and Cervid Dental Wear Analyses - 2016 Rivals Et AlDocument12 pagesPaleoenvironment in East Java During The Last 25,000 Years As Inferred From Bovid and Cervid Dental Wear Analyses - 2016 Rivals Et AlBogdan HaiducNo ratings yet
- Scott Et Al (2009) AJPA - Ouranopithecus Sexual DimorphismDocument12 pagesScott Et Al (2009) AJPA - Ouranopithecus Sexual DimorphismBogdan HaiducNo ratings yet
- Pages From Ward Et Al (2000) Science - EquatoriusDocument1 pagePages From Ward Et Al (2000) Science - EquatoriusBogdan HaiducNo ratings yet
- How To Install R PDFDocument2 pagesHow To Install R PDFBogdan HaiducNo ratings yet
- Kelley & Alpagut (1999) JHE - Pasalar CaninesDocument7 pagesKelley & Alpagut (1999) JHE - Pasalar CaninesBogdan HaiducNo ratings yet
- Hershkovitz Et Al (1997) JHE - Sivapithecus Oral BacteriaDocument6 pagesHershkovitz Et Al (1997) JHE - Sivapithecus Oral BacteriaBogdan HaiducNo ratings yet
- Phytoliths - A Comprehensive Guide For Archaeologists and PaleoecologistsDocument2 pagesPhytoliths - A Comprehensive Guide For Archaeologists and PaleoecologistsBogdan HaiducNo ratings yet
- Anders & Koenigswald (2013) Mammuthus AgesDocument16 pagesAnders & Koenigswald (2013) Mammuthus AgesBogdan HaiducNo ratings yet
- Why Does Micromorphology Have Such Little Traction in Geoarchaeology - Aldeias Et Al 2016Document11 pagesWhy Does Micromorphology Have Such Little Traction in Geoarchaeology - Aldeias Et Al 2016Bogdan HaiducNo ratings yet
- Kelley & Gao (2012) PNAS (SI) - Yuanmou CraniumDocument3 pagesKelley & Gao (2012) PNAS (SI) - Yuanmou CraniumBogdan HaiducNo ratings yet
- Kelley & Etler (1989) AJP - Lufeng Species NumberDocument20 pagesKelley & Etler (1989) AJP - Lufeng Species NumberBogdan HaiducNo ratings yet
- Registration Form SPR 2017Document1 pageRegistration Form SPR 2017Bogdan HaiducNo ratings yet
- Baigusheva Et Al - Tooth of Early Generations - QI - 2016Document14 pagesBaigusheva Et Al - Tooth of Early Generations - QI - 2016Bogdan HaiducNo ratings yet
- First Cenozoic BirdDocument8 pagesFirst Cenozoic BirdBogdan HaiducNo ratings yet
- 2016 Impact Factor (JCR)Document210 pages2016 Impact Factor (JCR)dipsiiiNo ratings yet
- Pusheen With Donut: Light Grey, Dark Grey, Brown, RoséDocument13 pagesPusheen With Donut: Light Grey, Dark Grey, Brown, RosémafaldasNo ratings yet
- List of Fatigue Standards and Fracture Standards Developed by ASTM & ISODocument3 pagesList of Fatigue Standards and Fracture Standards Developed by ASTM & ISOSatrio Aditomo100% (1)
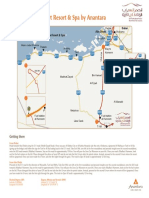
- Qasr Al Sarab Desert Resort Location Map June2012Document1 pageQasr Al Sarab Desert Resort Location Map June2012Anant GârgNo ratings yet
- Us Navy To Evaluate Anti Submarine Warfare Training SystemDocument2 pagesUs Navy To Evaluate Anti Submarine Warfare Training SystemVictor PileggiNo ratings yet
- FebvreDocument449 pagesFebvreIan Pereira AlvesNo ratings yet
- Kimi No Na Wa LibropdfDocument150 pagesKimi No Na Wa LibropdfSarangapani BorahNo ratings yet
- 500 TransDocument5 pages500 TransRodney WellsNo ratings yet
- Crma Unit 1 Crma RolesDocument34 pagesCrma Unit 1 Crma Rolesumop3plsdn0% (1)
- Volvo Penta GensetDocument4 pagesVolvo Penta GensetafandybaharuddinNo ratings yet
- Diagnostic Imaging of The Pharynx and Esophagus: Key PointsDocument33 pagesDiagnostic Imaging of The Pharynx and Esophagus: Key PointsChutcharwan JintasoponNo ratings yet
- Comparative Study On Serial and Parallel Manipulators - ReviewDocument23 pagesComparative Study On Serial and Parallel Manipulators - ReviewShaik Himam SahebNo ratings yet
- Chapter 7 - Stress - TransformationsDocument21 pagesChapter 7 - Stress - TransformationsroselleNo ratings yet
- Reynold A. Nicholson - The Mystics of IslamDocument65 pagesReynold A. Nicholson - The Mystics of IslamLuminon SamanNo ratings yet
- Theoretical CyclesDocument49 pagesTheoretical CyclesMariaEzzaSyUyNo ratings yet
- Petersen Coils Basic 20principle and ApplicationDocument3 pagesPetersen Coils Basic 20principle and ApplicationasotozuazuaNo ratings yet
- Tabla9 1Document1 pageTabla9 1everquinNo ratings yet
- Bravo MRI II Operation ManualDocument45 pagesBravo MRI II Operation ManualLuis100% (1)
- Technical Data Sheet: LPI HVSC PlusDocument2 pagesTechnical Data Sheet: LPI HVSC PlusNguyễn TấnNo ratings yet
- Indoor Air Quality Standard Procedures - 2014 RevDocument12 pagesIndoor Air Quality Standard Procedures - 2014 RevFioriAmeliaHathawayNo ratings yet
- Adaptive Reuse Architecture Documentation and Analysis 2168 9717 1000172Document9 pagesAdaptive Reuse Architecture Documentation and Analysis 2168 9717 1000172Komal HundiaNo ratings yet
- 08 - 2061 USTR 2222a (1) Supor EKVDocument24 pages08 - 2061 USTR 2222a (1) Supor EKVHassan Houdoud0% (1)
- GSD Puppy Training Essentials PDFDocument2 pagesGSD Puppy Training Essentials PDFseja saulNo ratings yet
- Orbitol Motor TMTHWDocument20 pagesOrbitol Motor TMTHWRodolfo ErenoNo ratings yet
- A Study On Traditional Medicinal Herbs Used by The Ethnic People of Goalpara District of Assam, North East IndiaDocument6 pagesA Study On Traditional Medicinal Herbs Used by The Ethnic People of Goalpara District of Assam, North East IndiaDr. Krishna N. SharmaNo ratings yet
- IBM BladeCenter S RedBookDocument36 pagesIBM BladeCenter S RedBookGuillermo García GándaraNo ratings yet
- Medical GeneticsDocument4 pagesMedical GeneticsCpopNo ratings yet
- FBC MNCS Service-, Error-, Infocodes ENDocument23 pagesFBC MNCS Service-, Error-, Infocodes ENDragos Stoian100% (1)
- Gaffin, Biblical Theology and Westminster StandardsDocument16 pagesGaffin, Biblical Theology and Westminster StandardstheoarticlesNo ratings yet
- Azure Machine Learning StudioDocument17 pagesAzure Machine Learning StudioNurain IsmailNo ratings yet
- Coffee Quality Manual by Abra Rand Nig Use IDocument25 pagesCoffee Quality Manual by Abra Rand Nig Use IIpungNo ratings yet