You might also like
- L33 ECEN5817 Out1Document14 pagesL33 ECEN5817 Out1djyNo ratings yet
- EEE308 Midterm Fall 2023Document3 pagesEEE308 Midterm Fall 2023ANWAR SHADMANNo ratings yet
- EE254: D2 Buck ConverterDocument13 pagesEE254: D2 Buck ConverterNeil Hildick-SmithNo ratings yet
- Final Exam 15-06-2012 (Answered)Document4 pagesFinal Exam 15-06-2012 (Answered)Cristian ToapantaNo ratings yet
- Analog Electronics Lab ManualDocument9 pagesAnalog Electronics Lab ManualRohan KatkamNo ratings yet
- EE230: LAB 3 Opamp Circuit: 1 Overview of The ExperimentDocument11 pagesEE230: LAB 3 Opamp Circuit: 1 Overview of The ExperimentHARSH GARGNo ratings yet
- Electronics: 10-Ghz Fully Di Biquad Filters in 55Nm Sige Bicmos TechnologyDocument14 pagesElectronics: 10-Ghz Fully Di Biquad Filters in 55Nm Sige Bicmos Technologyjesus barrionuevoNo ratings yet
- Homework Assignment #4 Transformer Design: L D I (T) D Q D Q I IDocument2 pagesHomework Assignment #4 Transformer Design: L D I (T) D Q D Q I Iuzair amin0% (1)
- Multiple Feedback CircuitDocument7 pagesMultiple Feedback CircuitbelmontNo ratings yet
- IntroductionDocument31 pagesIntroductionWagner SilvaNo ratings yet
- Design Forward Converter Regenerative Snubber Optimizes EfficiencyDocument30 pagesDesign Forward Converter Regenerative Snubber Optimizes EfficiencyMityaNo ratings yet
- Elmore Delay, Logical EffortDocument47 pagesElmore Delay, Logical EffortAtul YadavNo ratings yet
- 2.diode Clipper and ClamperDocument12 pages2.diode Clipper and ClamperMounika AllagaddaNo ratings yet
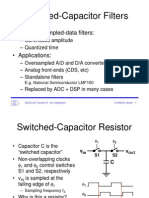
- Switched-Capacitor Filters: - "Analog" Sampled-Data FiltersDocument24 pagesSwitched-Capacitor Filters: - "Analog" Sampled-Data FiltersPushpendra DwivediNo ratings yet
- ECEN325 Linear Circuit Analysis ReviewDocument38 pagesECEN325 Linear Circuit Analysis ReviewBOBNo ratings yet
- Lec - 5 - Modeling of Electrical SystemsDocument33 pagesLec - 5 - Modeling of Electrical SystemsMaryam BhattiNo ratings yet
- Continuous-Time OTA-C Filters: Advantages: OTA-C Filters Have The Advantages of High Frequency or Wide BandwidthDocument12 pagesContinuous-Time OTA-C Filters: Advantages: OTA-C Filters Have The Advantages of High Frequency or Wide BandwidthAshraf DeenNo ratings yet
- Purwanchal University LEVEL: B. E. (Electronics & Communication) SUBJECT: BEG337EC, Filter Design. Time: 03:00 Hrs Pass Marks: 32Document10 pagesPurwanchal University LEVEL: B. E. (Electronics & Communication) SUBJECT: BEG337EC, Filter Design. Time: 03:00 Hrs Pass Marks: 32miraj tamrakarNo ratings yet
- Analysis of Darlington Pair in Distributed Amplifier Circuit: April 2015Document5 pagesAnalysis of Darlington Pair in Distributed Amplifier Circuit: April 2015RachelNo ratings yet
- Analysis of Darlington Pair in Distributed Amplifier Circuit: April 2015Document5 pagesAnalysis of Darlington Pair in Distributed Amplifier Circuit: April 2015mroocx1000No ratings yet
- SwitchCap UnderstandingDocument28 pagesSwitchCap UnderstandingRajeev JainNo ratings yet
- Tutorial Sheet - 9 2020Document2 pagesTutorial Sheet - 9 2020guddu guptaNo ratings yet
- R5210203 Pulse & Digital Circuits4Document1 pageR5210203 Pulse & Digital Circuits4subbuNo ratings yet
- Analog Design TechniquesDocument22 pagesAnalog Design TechniquesShiva RamNo ratings yet
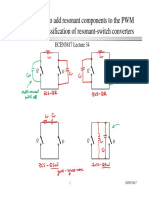
- Possible Ways To Add Resonant Components To The PWM Switch Cell: Classification of Resonant-Switch ConvertersDocument11 pagesPossible Ways To Add Resonant Components To The PWM Switch Cell: Classification of Resonant-Switch ConvertersdjyNo ratings yet
- Chirp Generators For Millimeter-Wave FMCW RadarsDocument15 pagesChirp Generators For Millimeter-Wave FMCW RadarsEşref TürkmenNo ratings yet
- Switching Frequency Characteristics of a Single-switch High Step-up DC-DC ConverterDocument4 pagesSwitching Frequency Characteristics of a Single-switch High Step-up DC-DC ConverterSureshkumar AlagarsamyNo ratings yet
- Half Bridge Converter PaperDocument6 pagesHalf Bridge Converter PaperAryaNo ratings yet
- SMK Student Prototype Design CompetitionDocument8 pagesSMK Student Prototype Design CompetitionManap 21No ratings yet
- OP AMP AssignmentDocument8 pagesOP AMP AssignmentPradeep ChauhanNo ratings yet
- Compensation Design From LinearDocument39 pagesCompensation Design From LinearTrung Nguyen ChiNo ratings yet
- Exam1 2014 Final SolutionDocument12 pagesExam1 2014 Final SolutionMohd Helmy Hakimie RozlanNo ratings yet
- ECE 4121 Lec08WireDocument34 pagesECE 4121 Lec08WireSunil ChoudharyNo ratings yet
- EE42 100 Wb-Lecture19 080713-FDocument37 pagesEE42 100 Wb-Lecture19 080713-FozanistzNo ratings yet
- ELEN 689 -603 Pipeline ADC’s PerformanceDocument29 pagesELEN 689 -603 Pipeline ADC’s PerformanceInJune YeoNo ratings yet
- Power Electronics Drive CircuitDocument26 pagesPower Electronics Drive CircuitSafnas KariapperNo ratings yet
- Sampleproblems2 PDFDocument4 pagesSampleproblems2 PDFJose Martin Cisneros MandujanoNo ratings yet
- HW 3Document3 pagesHW 3Localized Prayer App0% (1)
- Report - CT FinalDocument12 pagesReport - CT FinalArup DasNo ratings yet
- RC Circuits: Charging, Discharging, Integration & DifferentiationDocument7 pagesRC Circuits: Charging, Discharging, Integration & DifferentiationMohmed Al NajarNo ratings yet
- Triangle-Wave Generator (TWG) Outputs Both Triangle and Square Waves. Twgs AreDocument16 pagesTriangle-Wave Generator (TWG) Outputs Both Triangle and Square Waves. Twgs Aremuhaned190No ratings yet
- Slua 923Document10 pagesSlua 923david reyesNo ratings yet
- Chapter 17Document66 pagesChapter 17helenarajNo ratings yet
- Buffer InsertionDocument47 pagesBuffer InsertionAkhil MehtaNo ratings yet
- Digital Integrated CircuitsDocument66 pagesDigital Integrated CircuitsRegina MerlinNo ratings yet
- Automatic Control LCL FilterDocument1 pageAutomatic Control LCL FilterMIYURU LAKSHANNo ratings yet
- ECEN 4797 Homework Assignment #1 AnalysisDocument3 pagesECEN 4797 Homework Assignment #1 Analysisollata kalanoNo ratings yet
- Multilevel Inverter With Reducing Device Count:: Project Batch-15Document20 pagesMultilevel Inverter With Reducing Device Count:: Project Batch-15madhu madhaviNo ratings yet
- Generalized Average Modeling of Dual ActiveDocument7 pagesGeneralized Average Modeling of Dual ActiveHarsh ChittoraNo ratings yet
- Chapter 2Document65 pagesChapter 2Gray AbNo ratings yet
- Course Roadmap - Rectification - Bipolar Junction TransistorDocument50 pagesCourse Roadmap - Rectification - Bipolar Junction TransistornoorNo ratings yet
- Latched Comparator: ADC Converters (Continued)Document28 pagesLatched Comparator: ADC Converters (Continued)shriniwas ghadyaljiNo ratings yet
- LLC Converters Application - Note - Resonant LLC Converter Operation and Design - Infineon PDFDocument19 pagesLLC Converters Application - Note - Resonant LLC Converter Operation and Design - Infineon PDFFabio Pedroso de MoraisNo ratings yet
- BJTDocument18 pagesBJTMohd Nasrul Shafiq MnsNo ratings yet
- Ec IiDocument2 pagesEc IiDEPARTMENT OF EEE SVEWNo ratings yet
- QP D15 De57 PDFDocument3 pagesQP D15 De57 PDFRajashekarBalyaNo ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- ADC DAC and Sensor Interfacing LECTURE# 19Document17 pagesADC DAC and Sensor Interfacing LECTURE# 19MahreenNo ratings yet
- Data Sheet: 74LVC2G07Document13 pagesData Sheet: 74LVC2G07Le DungNo ratings yet
- Elecraft kx3 SCH PDFDocument19 pagesElecraft kx3 SCH PDFBlagoja GjakovskiNo ratings yet
- EE240 Term Project Performance SummaryDocument22 pagesEE240 Term Project Performance SummaryArnab Jyoti BaruahNo ratings yet
- IMXRT1060RMDocument3,522 pagesIMXRT1060RMkabraham.abinNo ratings yet
- Logic Families LectureDocument20 pagesLogic Families LectureRamendraRamuakaNo ratings yet
- Ad 630Document13 pagesAd 630Antonio PerezNo ratings yet
- Vlsi Unit IIDocument57 pagesVlsi Unit IIBasava RajuNo ratings yet
- Power Amplifiers SheetDocument25 pagesPower Amplifiers SheetJavid Safiullah 100No ratings yet
- Logic FamiliesDocument34 pagesLogic FamiliesAkshay RFNo ratings yet
- JBL Class D Training WorkbookDocument24 pagesJBL Class D Training WorkbookGerardo Mendez CamarilloNo ratings yet
- EE370 L1 IntroductionDocument38 pagesEE370 L1 IntroductionAnshul GoelNo ratings yet
- Resume For Amit SinghDocument2 pagesResume For Amit SinghAmit SinghNo ratings yet
- DSD PresentationDocument16 pagesDSD PresentationMeezan ChandNo ratings yet
- Midrange 8-Bit PIC Microcontrollers: MGR, RJ 1Document115 pagesMidrange 8-Bit PIC Microcontrollers: MGR, RJ 1Mohan Kumar NNo ratings yet
- 1A Bipolar Linear Regulator: FeaturesDocument7 pages1A Bipolar Linear Regulator: FeaturesFelipe silva santanaNo ratings yet
- Effort Discrimination System (Light Column Volt Meter)Document4 pagesEffort Discrimination System (Light Column Volt Meter)bubbapaulNo ratings yet
- KUPPAM ENGINEERING COLLEGE OBJECTIVE AND DESCRIPTIVE MID TEST QUESTIONS ON LINEAR INTEGRATED CIRCUITSDocument4 pagesKUPPAM ENGINEERING COLLEGE OBJECTIVE AND DESCRIPTIVE MID TEST QUESTIONS ON LINEAR INTEGRATED CIRCUITSN.RAMAKUMARNo ratings yet
- G ADD8754: LCD Panel Power, V, and Ate ModulationDocument28 pagesG ADD8754: LCD Panel Power, V, and Ate ModulationGaneshNo ratings yet
- Seven Band Graphic Equalizer Data Sheet: Description FeaturesDocument4 pagesSeven Band Graphic Equalizer Data Sheet: Description FeaturesAlexander MontellanoNo ratings yet
- PWM motor drive circuit schematic and descriptionDocument1 pagePWM motor drive circuit schematic and descriptionaaNo ratings yet
- 500MHz 288kb CMOS SRAM Macro for On-Chip CacheDocument3 pages500MHz 288kb CMOS SRAM Macro for On-Chip CacheBhargavi PatilNo ratings yet
- Digital Electronics - Logic Gates - Two Basic Logis AND and ORDocument2 pagesDigital Electronics - Logic Gates - Two Basic Logis AND and ORLasmaenita SiahaanNo ratings yet
- Pseudo Nmos PDFDocument22 pagesPseudo Nmos PDFAnonymous hsb1qnt3B0% (1)
- SG1524/SG2524/SG3524: FeaturesDocument7 pagesSG1524/SG2524/SG3524: FeaturesZia Ur RahmanNo ratings yet
- PDFDocument30 pagesPDFmarioasensicollantesNo ratings yet
- 12V DC To 220V AC Converter DesignDocument7 pages12V DC To 220V AC Converter DesigntintuvrNo ratings yet
- CMOS Transistor Theory LectureDocument44 pagesCMOS Transistor Theory Lecturesadia santaNo ratings yet
- 16 - Channel 8 - Bit Adc Interface: User ManualDocument60 pages16 - Channel 8 - Bit Adc Interface: User ManualSeethalakshmi VNo ratings yet
- STM32F7xxx - Hardware Development PDFDocument54 pagesSTM32F7xxx - Hardware Development PDFYen DaoNo ratings yet