You might also like
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209From EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Rating: 1 out of 5 stars1/5 (2)
- Dirección Asistida EléctricaDocument11 pagesDirección Asistida EléctricaJose Ledezma100% (1)
- Dirección Asistida Electrónicamente EPSDocument5 pagesDirección Asistida Electrónicamente EPSDavid SalazarNo ratings yet
- Mantenimiento de sistemas auxiliares del motor de ciclo Otto. TMVG0409From EverandMantenimiento de sistemas auxiliares del motor de ciclo Otto. TMVG0409No ratings yet
- La Dirección Asistida Eléctrica y Su FuncionamientoDocument3 pagesLa Dirección Asistida Eléctrica y Su Funcionamientopedro luisNo ratings yet
- Practica AKERMAN Geometria Direcion 2018Document8 pagesPractica AKERMAN Geometria Direcion 2018Luis CorderoNo ratings yet
- Mantenimiento de sistemas auxiliares del motor de ciclo diésel. TMVG0409From EverandMantenimiento de sistemas auxiliares del motor de ciclo diésel. TMVG0409No ratings yet
- Cremalleras HidraulicasDocument117 pagesCremalleras HidraulicasRojas Mendoza William33% (3)
- Mantenimiento del sistema de carga con alternador. TMVG0209From EverandMantenimiento del sistema de carga con alternador. TMVG0209Rating: 3.5 out of 5 stars3.5/5 (8)
- Sistema de DirecciónDocument24 pagesSistema de Direcciónmanuel romeroNo ratings yet
- 4 Sistema L JetronicDocument49 pages4 Sistema L JetronicMatias Ibarra100% (1)
- Sistema Start StopDocument10 pagesSistema Start Stoppesatrco0% (1)
- Diagnostico Electrico DieselDocument19 pagesDiagnostico Electrico DieselIvan Alvarado JuradoNo ratings yet
- Manual Explicacion Funciones Posiciones Palanca Selectora Cajas Automaticas Transmisiones AutomaticasDocument7 pagesManual Explicacion Funciones Posiciones Palanca Selectora Cajas Automaticas Transmisiones AutomaticasAlexander Melo WilchezNo ratings yet
- Electricidad y Electronica Automotriz Basica121023Document159 pagesElectricidad y Electronica Automotriz Basica121023PERCY RODRIGUEZ100% (1)
- Diagnostico AutomotrizDocument10 pagesDiagnostico Automotrizromeo_mec100% (1)
- Direccion ElectrohidraulicaDocument6 pagesDireccion ElectrohidraulicaAnthony Campos GarciaNo ratings yet
- Semana 11Document40 pagesSemana 11Jose Rodriguez Roman100% (1)
- Tema 4 Diagnostico Acelerador Electronico 2Document33 pagesTema 4 Diagnostico Acelerador Electronico 2jorge lopezNo ratings yet
- Servicio en Las Cajas AutomáticasDocument13 pagesServicio en Las Cajas AutomáticasMaurizio SoledispaNo ratings yet
- Actuadores Del AbsDocument14 pagesActuadores Del AbsJocsmer Saldaña100% (1)
- Dirección EléctricaDocument19 pagesDirección EléctricaGean CalleNo ratings yet
- Pruebas A Sensores Del Sistema de Frenos ABSDocument32 pagesPruebas A Sensores Del Sistema de Frenos ABSjahemscb50% (2)
- Herramientas de Diagnostico de Motor de CombustibleDocument2 pagesHerramientas de Diagnostico de Motor de CombustibleEvelin EspinosaNo ratings yet
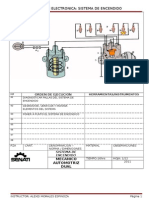
- Hoja de Trabajo encendido-ALEXEIDocument12 pagesHoja de Trabajo encendido-ALEXEIalexeim609030No ratings yet
- Maniobra de VálvulasDocument3 pagesManiobra de VálvulasErack SuizoNo ratings yet
- 05-Freno Telma2Document19 pages05-Freno Telma2Luigui Lopez Llanca100% (2)
- Dirección Asistida Kia 1 y 2 PDFDocument22 pagesDirección Asistida Kia 1 y 2 PDFAnibal CampañaNo ratings yet
- Tipos y Sistema de FrenosDocument28 pagesTipos y Sistema de FrenosyaralsiNo ratings yet
- Suspension MultilinkDocument5 pagesSuspension MultilinkJafet MonroyNo ratings yet
- Sistema de Embrague de FricciónDocument62 pagesSistema de Embrague de FricciónYiran NarvaezNo ratings yet
- Reparación de Un Motor A GasolinaDocument54 pagesReparación de Un Motor A GasolinamanuelelmerNo ratings yet
- Electricidad Básica Del AutomóvilDocument21 pagesElectricidad Básica Del Automóviljorgead69reservado100% (1)
- Semana 7 - Mantenimiento Básico Del MotorDocument105 pagesSemana 7 - Mantenimiento Básico Del MotorHARLEY HUAMANNo ratings yet
- Taller Automotriz II Frenos de TamborDocument17 pagesTaller Automotriz II Frenos de TamborKelly Young0% (1)
- Calculo de Ballestas de SuspensiónDocument10 pagesCalculo de Ballestas de SuspensiónTuyuyoNo ratings yet
- Sis Multi DiscoDocument9 pagesSis Multi DiscoElian Villarroel Socola100% (1)
- LuxometroDocument14 pagesLuxometroKeiver ParedesNo ratings yet
- Sensor de Temperatura Del MotorDocument2 pagesSensor de Temperatura Del Motorjucevac78100% (2)
- Prueba de Fuga de CilindrosDocument5 pagesPrueba de Fuga de CilindrosJuan Diego Sarango100% (1)
- Sistema de Frenos (BR)Document88 pagesSistema de Frenos (BR)CARLOSNo ratings yet
- Amod Amod-608 Ejercicio t001Document2 pagesAmod Amod-608 Ejercicio t001elio custodio huachaca100% (1)
- CTVDocument30 pagesCTVgermanNo ratings yet
- Guía Bomba de InyecciónDocument6 pagesGuía Bomba de Inyecciónanon_104695751No ratings yet
- 1 AirbagDocument36 pages1 Airbagcarlos castañedaNo ratings yet
- Modulo 4Document52 pagesModulo 4celedonio100% (1)
- Qué Es La Sincronización Del MotorDocument8 pagesQué Es La Sincronización Del MotorrolyNo ratings yet
- Tesis Del Motor Toyota 3bDocument61 pagesTesis Del Motor Toyota 3bKevin Ian CruzNo ratings yet
- Caracteristicas Del Sistema AbsDocument10 pagesCaracteristicas Del Sistema AbsCarlos Yascaribay0% (3)
- Clasificación de Las Cajas de CambioDocument26 pagesClasificación de Las Cajas de CambioAlejandro Cesar Florez BobadillaNo ratings yet
- Tipo de Transmisiones Automotrices.Document4 pagesTipo de Transmisiones Automotrices.Yasser DamirNo ratings yet
- Práctica N°1Document17 pagesPráctica N°1steven cordovaNo ratings yet
- Trabajo de Proyecto FSDDocument15 pagesTrabajo de Proyecto FSDMario Rivas0% (1)
- Formato - Guia de Practicas - 2Document2 pagesFormato - Guia de Practicas - 2EDISON PUSAYNo ratings yet
- Sistemas - Encendido - Pruebas de SensoresDocument28 pagesSistemas - Encendido - Pruebas de SensoresFernandoCallataNo ratings yet
- Direccion ElectricaDocument12 pagesDireccion ElectricaSebastian Machuca100% (1)
- Direccion Asistida Electrica y Control de EstabilidadDocument32 pagesDireccion Asistida Electrica y Control de EstabilidadgermanNo ratings yet
- Direccion Asistida Electricamente y Sistema EspDocument32 pagesDireccion Asistida Electricamente y Sistema EspÑalyFabianLucasNo ratings yet
- BIintensivoDocument4 pagesBIintensivoMaria Elizabeth Uyana CalvaNo ratings yet
- CartelDocument2 pagesCartelVictorCarbayNo ratings yet
- Razone Sy Pro Porc I One SivDocument4 pagesRazone Sy Pro Porc I One SivFranklin garry100% (1)
- Razonamiento NumericoDocument2 pagesRazonamiento NumericoVictorCarbayNo ratings yet
- Mariquita CatarinaDocument4 pagesMariquita CatarinaVictorCarbayNo ratings yet
- Ciencias SocialesDocument9 pagesCiencias SocialesVictorCarbayNo ratings yet
- Mariquita-Catarina Comprensiòn Lectora Multigrado PDFDocument3 pagesMariquita-Catarina Comprensiòn Lectora Multigrado PDFCynthia Andrea Almonacid Molinet100% (1)
- Resumen 1Document1 pageResumen 1VictorCarbayNo ratings yet
- Ejercicios de Comprensión de Lectura para BachilleratoDocument5 pagesEjercicios de Comprensión de Lectura para BachilleratoVictorCarbayNo ratings yet
- M 4 Unidad 05Document10 pagesM 4 Unidad 05VictorCarbayNo ratings yet
- Biología Semana 3 - Parte 2Document17 pagesBiología Semana 3 - Parte 2VictorCarbayNo ratings yet
- Biología Semana 3 - Parte 2 PDFDocument13 pagesBiología Semana 3 - Parte 2 PDFMarcos CangoNo ratings yet
- Practica 1 Bioquimica LinksDocument5 pagesPractica 1 Bioquimica LinksVictorCarbayNo ratings yet
- FACTORIZACIONDocument32 pagesFACTORIZACIONGeo Artemiz Juarez GuzmanNo ratings yet
- Biología Semana 3 - Parte 2 PDFDocument13 pagesBiología Semana 3 - Parte 2 PDFMarcos CangoNo ratings yet
- Resumen GramaticaDocument20 pagesResumen GramaticaVictorCarbayNo ratings yet
- Canciones y Acordes VariosDocument6 pagesCanciones y Acordes VariosVictorCarbayNo ratings yet
- Trabajo de Mecanica EN CLASESDocument8 pagesTrabajo de Mecanica EN CLASESVictorCarbayNo ratings yet
- Ecuaciones Con Fracciones (Nivel 4)Document19 pagesEcuaciones Con Fracciones (Nivel 4)VictorCarbayNo ratings yet
- Estudio de FactibilidadeconómicaDocument6 pagesEstudio de FactibilidadeconómicaMabel ArmasNo ratings yet
- Direccion Asistida Electrica y Control de AdDocument32 pagesDireccion Asistida Electrica y Control de AdDveseNo ratings yet
- Psicología Aplicada - Opciones MultiplesDocument2 pagesPsicología Aplicada - Opciones MultiplesVictorCarbay100% (1)
- Aa17tarea 7 Transformaciones LinealesDocument2 pagesAa17tarea 7 Transformaciones LinealesVictorCarbayNo ratings yet
- Tabla Periodica ColorDocument1 pageTabla Periodica Colorprueba123456789No ratings yet
- SÍLABO DE DISEÑO DE INVESTIGACIÓN SOCIAL INFORMÁTICA 2015-2016 - 19s PDFDocument33 pagesSÍLABO DE DISEÑO DE INVESTIGACIÓN SOCIAL INFORMÁTICA 2015-2016 - 19s PDFVictorCarbayNo ratings yet
- Curso de VeranoDocument1 pageCurso de VeranoVictorCarbayNo ratings yet
- Estudio de FactibilidadeconómicaDocument6 pagesEstudio de FactibilidadeconómicaMabel ArmasNo ratings yet
- Pre UniDocument3 pagesPre UniVictorCarbayNo ratings yet
- Taller AbstractoDocument8 pagesTaller AbstractoVictorCarbay100% (1)
- 402 - HPCR Sistema de CombustibleDocument48 pages402 - HPCR Sistema de CombustibleAdolfo Montes MorenoNo ratings yet
- Estructura de Un VehiculoDocument29 pagesEstructura de Un Vehiculopatricio_2769100% (2)
- Unit 3-4 Main Parts of STEERING SYSTEMDocument39 pagesUnit 3-4 Main Parts of STEERING SYSTEMJose Miguel GutierrezNo ratings yet
- REG-ADEQ-008 - PAUTA GENERADOR KIPOR KDE 12 Staf 250 HrsDocument1 pageREG-ADEQ-008 - PAUTA GENERADOR KIPOR KDE 12 Staf 250 Hrspablo herreraNo ratings yet
- Ficha Tecnica New Changan HunterDocument3 pagesFicha Tecnica New Changan HunterMarco BustosNo ratings yet
- Factura 20503258901-01-F606-7865 PorterDocument1 pageFactura 20503258901-01-F606-7865 PorterDoris kerly Noel jaraNo ratings yet
- C4 - B1EG3FP0 - Desmontaje - Montaje - Correa de Distribución2Document7 pagesC4 - B1EG3FP0 - Desmontaje - Montaje - Correa de Distribución2albertocarbono5258No ratings yet
- Bloque Del MotorDocument3 pagesBloque Del MotorFernando CárdenasNo ratings yet
- Linea Del Tirmepo de Motores de 5Document9 pagesLinea Del Tirmepo de Motores de 5Noe PitonesNo ratings yet
- 1 Berlingo Multispace 1.6 Hdi SX Am54Document3 pages1 Berlingo Multispace 1.6 Hdi SX Am54lmazzaglia100% (1)
- Codigos de Falla l120f-04Document106 pagesCodigos de Falla l120f-04Yoel Ascencio charri100% (7)
- 1.6 LTS 16 ValvulasDocument6 pages1.6 LTS 16 ValvulasBoston BanguNo ratings yet
- Catalogo de A4 2017Document53 pagesCatalogo de A4 2017dsdsfdfs100% (1)
- Maquinas Motrices y TermicasDocument17 pagesMaquinas Motrices y TermicasGeremy ReinosoNo ratings yet
- Onix Seda Ficha TecnicaDocument3 pagesOnix Seda Ficha TecnicaGerardoNo ratings yet
- Cuestionario Grado Mecanica BasicaDocument12 pagesCuestionario Grado Mecanica BasicaEduan HualpaNo ratings yet
- TOYOTA EspecificacionesDocument82 pagesTOYOTA EspecificacionesCarlos Enrique Gutierrez Martinez70% (10)
- Tipos de Motores A Gasolina Cristian Santiago VásquezDocument13 pagesTipos de Motores A Gasolina Cristian Santiago VásquezDannys CuxNo ratings yet
- Distribución Peugeot DV6Document12 pagesDistribución Peugeot DV6Host FliesNo ratings yet
- Catálogo Firad Piezoelétrico - Fevereiro 2022 (Espanhol)Document9 pagesCatálogo Firad Piezoelétrico - Fevereiro 2022 (Espanhol)bicosfiradNo ratings yet
- Funrunt PDFDocument2 pagesFunrunt PDFLorena ContrerasNo ratings yet
- Seminario de Complementacion Practica Hoja de Práctica de Taller Tarea N.6Document4 pagesSeminario de Complementacion Practica Hoja de Práctica de Taller Tarea N.6aldo roel oscco floresNo ratings yet
- Maquinas y Herramientas Semana 5 ControlDocument7 pagesMaquinas y Herramientas Semana 5 ControlMauro Cortés Gorigoitía100% (1)
- Manual de Servicio Discover 1252Document153 pagesManual de Servicio Discover 1252wgmogx83% (23)
- Inventario para Entrega Del VehículoDocument2 pagesInventario para Entrega Del Vehículokaren jirehNo ratings yet
- Configuration 1290 Super Duke R 2022Document9 pagesConfiguration 1290 Super Duke R 2022BIEN CHIDORISNo ratings yet
- 05 ZF 6WG-200 TransmisiónDocument38 pages05 ZF 6WG-200 TransmisiónJuan Pablo urria schwarzenberg97% (37)
- KOBLA Gasoline Pumps CatalogDocument24 pagesKOBLA Gasoline Pumps CatalogJose Jaime QuirogaNo ratings yet
- Equipos TracklessDocument42 pagesEquipos TracklessHerrera Antaya HuberthNo ratings yet
- FT-SST-054 Formato Preoperacional VolquetaDocument1 pageFT-SST-054 Formato Preoperacional VolquetaZAYDE SUAREZNo ratings yet