You might also like
- CFDLV15 N11 P16 35Document20 pagesCFDLV15 N11 P16 35mabm89No ratings yet
- Improving The Resistance of A Series 60 Vessel With A CFD CodeDocument14 pagesImproving The Resistance of A Series 60 Vessel With A CFD CodeIbrahim MadanNo ratings yet
- Jmse 08 00649Document23 pagesJmse 08 00649Ruchit PathakNo ratings yet
- Numerical Simulation of Damage Ship FlooDocument6 pagesNumerical Simulation of Damage Ship FlooThanos NiotisNo ratings yet
- Nutts 01 2010 Duisburg PDFDocument153 pagesNutts 01 2010 Duisburg PDFAnaa ChiroşcăNo ratings yet
- Calculation of Bottom Clearance Effects On UV HydrodynamicsDocument25 pagesCalculation of Bottom Clearance Effects On UV Hydrodynamicshalcyon304No ratings yet
- Day1Paper5-IHPC-Fully Nonlinear Wave SimulationDocument9 pagesDay1Paper5-IHPC-Fully Nonlinear Wave SimulationZobair Ibn AwalNo ratings yet
- Research On Drift Path Prediction Technology of ShipsDocument5 pagesResearch On Drift Path Prediction Technology of ShipssikedbruhNo ratings yet
- Simulation of the flow around the surface combatant DTMB model 5415Document9 pagesSimulation of the flow around the surface combatant DTMB model 5415Marsel GabrielNo ratings yet
- Catamaran Wetdeck Slamming Loads Using CFDDocument6 pagesCatamaran Wetdeck Slamming Loads Using CFDAhmadA.SwidanNo ratings yet
- Simulation of The Flow Around The Surface Combatant DTMB Model 5415 atDocument9 pagesSimulation of The Flow Around The Surface Combatant DTMB Model 5415 atFatwa AzamNo ratings yet
- Probabilistic Study of The Aerodynamic Around A 3D WingDocument11 pagesProbabilistic Study of The Aerodynamic Around A 3D WingAlfredo Gonzalez SoteloNo ratings yet
- Assessment of Slam Induced Loads On Two Dimensional Wedges and Ship SectionsDocument10 pagesAssessment of Slam Induced Loads On Two Dimensional Wedges and Ship SectionsMarcelo De Oliveira PredesNo ratings yet
- Jarosław Artyszuk PDFDocument16 pagesJarosław Artyszuk PDFCharles JonesNo ratings yet
- An Optimization Study For The Bow Form of High Speed Displacement CatamaransDocument8 pagesAn Optimization Study For The Bow Form of High Speed Displacement Catamaransmustafa InselNo ratings yet
- Boundary Element Technique in Petroleum Reservoir SimulationDocument8 pagesBoundary Element Technique in Petroleum Reservoir Simulationiky77No ratings yet
- Free Surface Flow Simulation Around Wigley HullDocument7 pagesFree Surface Flow Simulation Around Wigley HullDương SángNo ratings yet
- Tuck RevisedDocument16 pagesTuck RevisedSaiSudhakar MamidipakaNo ratings yet
- Analysis of The Performance of Streamline Simulation: Célio MaschioDocument10 pagesAnalysis of The Performance of Streamline Simulation: Célio MaschioAli DasmehNo ratings yet
- Omae 2021Document18 pagesOmae 2021Subal VinayanNo ratings yet
- Mesh ShipDocument7 pagesMesh ShipPranshu MalikNo ratings yet
- Experimental and CFD Resistance Calculation of A Small Fast CatamaranDocument7 pagesExperimental and CFD Resistance Calculation of A Small Fast CatamaranChandra SibaraniNo ratings yet
- Numerical Investigation On Seakeeping Performance of SWATH With Three Dimensional Translating-Pulsating Source Green Function (Sun-Yao-Ye)Document11 pagesNumerical Investigation On Seakeeping Performance of SWATH With Three Dimensional Translating-Pulsating Source Green Function (Sun-Yao-Ye)naufragatoNo ratings yet
- Inmmersed HydrofoilDocument13 pagesInmmersed HydrofoilJairo UsecheNo ratings yet
- Prediction of Added Resistance of Ships by 3-D Green Function Method and Its Comparision With Semi-3-D and 2-D ApproachesDocument10 pagesPrediction of Added Resistance of Ships by 3-D Green Function Method and Its Comparision With Semi-3-D and 2-D ApproachesDavid Wise-MannNo ratings yet
- 17-Bergsma FSI Paper RevisedDocument10 pages17-Bergsma FSI Paper RevisedSunil Kumar P GNo ratings yet
- A Power Prediction Method and Its Application To Small Ships.Document19 pagesA Power Prediction Method and Its Application To Small Ships.Goutam Kumar SahaNo ratings yet
- Ijms 47 (1) 89-95Document7 pagesIjms 47 (1) 89-95Gaming news tadkaNo ratings yet
- Mathematics in The Wind: D. Detomi, N. Parolini and A. QuarteroniDocument22 pagesMathematics in The Wind: D. Detomi, N. Parolini and A. QuarteroniecasayangNo ratings yet
- Computation of Perspective KRISO Containership Towing Tests With The Help of The Complex of Hydrodynamical Analysis FlowVisionDocument10 pagesComputation of Perspective KRISO Containership Towing Tests With The Help of The Complex of Hydrodynamical Analysis FlowVisionSADULLAHNo ratings yet
- Simulation of Unsteady Ship Maneuvering Using Free-Surface RANS SolverDocument19 pagesSimulation of Unsteady Ship Maneuvering Using Free-Surface RANS Solverandevari100% (1)
- CFD Simulation and Validation of a Flap Type Wave-MakerDocument7 pagesCFD Simulation and Validation of a Flap Type Wave-MakerTrần Văn CườngNo ratings yet
- Discontinuidades en ConcretoDocument9 pagesDiscontinuidades en ConcretoGRCStudent CommitteeNo ratings yet
- The Influence of Gravity On The Performance of Planing Vessels in Calm WaterDocument17 pagesThe Influence of Gravity On The Performance of Planing Vessels in Calm WaternaufragatoNo ratings yet
- Determinación Campo D KDocument4 pagesDeterminación Campo D KJose Antonio MendezNo ratings yet
- European Journal of Mechanics B/Fluids: Ahmad Shoja-Sani, Ehsan Roohi, Mohsen Kahrom, Stefan StefanovDocument16 pagesEuropean Journal of Mechanics B/Fluids: Ahmad Shoja-Sani, Ehsan Roohi, Mohsen Kahrom, Stefan StefanovasdasddasNo ratings yet
- Calculation of Manoeuvring Forces On Submarines Using TwoDocument13 pagesCalculation of Manoeuvring Forces On Submarines Using TwoMuhammad Yasar Javaid100% (1)
- Dynamic Analysis of Planing Hulls in The Vertical Plane - AkersDocument19 pagesDynamic Analysis of Planing Hulls in The Vertical Plane - AkershaujesNo ratings yet
- Numerical Methods in Geotechnical Engineering: All Functions Active Only With Adobe Reader Version 6.0Document7 pagesNumerical Methods in Geotechnical Engineering: All Functions Active Only With Adobe Reader Version 6.0Snezana VulovicNo ratings yet
- Numerical Simulation of Regular Waves Onto A Vertical Circular CylinderDocument11 pagesNumerical Simulation of Regular Waves Onto A Vertical Circular CylinderkosmitoNo ratings yet
- Numerical Calculation of Ship Wave Resistance Based On Linear TheoryDocument4 pagesNumerical Calculation of Ship Wave Resistance Based On Linear TheoryvalynoNo ratings yet
- Flow Over A CylinderDocument14 pagesFlow Over A CylinderHariVathsalaNo ratings yet
- Numerical Simulation of Hull/propeller Interaction of Submarine in Submergence and Near Surface ConditionsDocument7 pagesNumerical Simulation of Hull/propeller Interaction of Submarine in Submergence and Near Surface ConditionsEkin Ege AltıntaşNo ratings yet
- Effect of Coupled Heave Pitch Motion On A Vessel Moving in Regular Water WaysDocument13 pagesEffect of Coupled Heave Pitch Motion On A Vessel Moving in Regular Water WaysJohn joi100% (1)
- On The Method of Ship's Transoceanic Route PlanningDocument8 pagesOn The Method of Ship's Transoceanic Route Planninga12021985No ratings yet
- Towards A Cfd-Based Prediction of Ship PerformanceDocument12 pagesTowards A Cfd-Based Prediction of Ship PerformanceSurya Chala PraveenNo ratings yet
- COB09-1054 Panel MethodsDocument9 pagesCOB09-1054 Panel MethodsAnonymous K48TgviNo ratings yet
- Article HW 1Document4 pagesArticle HW 1peretsa1No ratings yet
- CFD Simulation and Validation of Flap Type Wave-Maker: Anant Lal, and M. ElangovanDocument7 pagesCFD Simulation and Validation of Flap Type Wave-Maker: Anant Lal, and M. Elangovanghanbari8668No ratings yet
- Analysis of ground surface subsidence from compacting multiphase reservoirsDocument8 pagesAnalysis of ground surface subsidence from compacting multiphase reservoirschrissbansNo ratings yet
- 1996 - An Adaptive Level Set Approach For Incompressible Two-Phase Flows - Sussman Et AlDocument44 pages1996 - An Adaptive Level Set Approach For Incompressible Two-Phase Flows - Sussman Et AlRodrigo AbdoNo ratings yet
- Two-Equation Eddy-Viscosity Turbulence Model For Computing Drag Force On Axisymmetric Underwater Vehicle Hull FormDocument7 pagesTwo-Equation Eddy-Viscosity Turbulence Model For Computing Drag Force On Axisymmetric Underwater Vehicle Hull FormElyas Nur FridayanaNo ratings yet
- Msms 2Document19 pagesMsms 2ttunglNo ratings yet
- A New Double Porosity Reservoir Model For Oil/Water Flow ProblemsDocument7 pagesA New Double Porosity Reservoir Model For Oil/Water Flow ProblemsRonaldo RumbekwanNo ratings yet
- The Influence of Gravity On The Performance of Planing Vessels in Calm WaterDocument17 pagesThe Influence of Gravity On The Performance of Planing Vessels in Calm WatermohammadfarsiNo ratings yet
- 1996 KarDocument4 pages1996 KarTest Test2No ratings yet
- PETSOC 08-03-55 Model WorkDocument7 pagesPETSOC 08-03-55 Model WorkMejbahul SarkerNo ratings yet
- Anchored Fish Aggregating Devices For Artisanal Fisheries in South and Southeast Asia: Benefits and RisksDocument46 pagesAnchored Fish Aggregating Devices For Artisanal Fisheries in South and Southeast Asia: Benefits and RisksLenin ValerioNo ratings yet
- 2017 05 Guide Stab enDocument42 pages2017 05 Guide Stab enLenin ValerioNo ratings yet
- 06 WatpaneuropDocument137 pages06 WatpaneuropLenin ValerioNo ratings yet
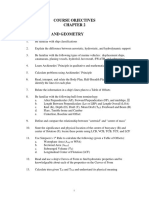
- Course Objectives 2. Hull Form and GeometryDocument53 pagesCourse Objectives 2. Hull Form and GeometryMehedi Hossain MithilNo ratings yet
- Course Objectives 5. Properties of Naval MaterialsDocument31 pagesCourse Objectives 5. Properties of Naval MaterialsLenin ValerioNo ratings yet
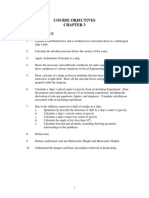
- EN200 Naval Engineering Chapter 3 PDFDocument42 pagesEN200 Naval Engineering Chapter 3 PDFanusha_wiproNo ratings yet
- EN200 Naval Engineering Chapter 3 PDFDocument42 pagesEN200 Naval Engineering Chapter 3 PDFanusha_wiproNo ratings yet
- 02.04 Chapter 4Document53 pages02.04 Chapter 4NziouNo ratings yet
- Course Objectives 2. Hull Form and GeometryDocument53 pagesCourse Objectives 2. Hull Form and GeometryMehedi Hossain MithilNo ratings yet
- Cage Mooring Systems: Course ManualDocument5 pagesCage Mooring Systems: Course ManualLenin ValerioNo ratings yet
- EN200 Naval Engineering Chapter 1 PDFDocument33 pagesEN200 Naval Engineering Chapter 1 PDFanusha_wiproNo ratings yet
- 06-Parafusos - ExerciciosDocument29 pages06-Parafusos - ExerciciosLenin ValerioNo ratings yet
- Galoa-Proceedings - SOBENA 2020 - 128671Document8 pagesGaloa-Proceedings - SOBENA 2020 - 128671Lenin ValerioNo ratings yet
- 02.04 Chapter 4Document53 pages02.04 Chapter 4NziouNo ratings yet
- 28º Congresso Internacional de Transporte Aquaviário, Construção Naval e OffshoreDocument9 pages28º Congresso Internacional de Transporte Aquaviário, Construção Naval e OffshoreLenin ValerioNo ratings yet
- Galoa-Proceedings - SOBENA 2020 - 128671Document8 pagesGaloa-Proceedings - SOBENA 2020 - 128671Lenin ValerioNo ratings yet
- Material HandlingDocument32 pagesMaterial HandlingLenin ValerioNo ratings yet
- Galoa-Proceedings - SOBENA 2020 - 128671Document8 pagesGaloa-Proceedings - SOBENA 2020 - 128671Lenin ValerioNo ratings yet
- 08 7 Reed Telstie PDFDocument11 pages08 7 Reed Telstie PDFLenin ValerioNo ratings yet
- Stability AHTSDocument9 pagesStability AHTSLenin Valerio0% (1)
- Wood For Fishing Vessels by Gunnar PedersenDocument16 pagesWood For Fishing Vessels by Gunnar PedersenLenin ValerioNo ratings yet
- A6DShipSimulation PDFDocument14 pagesA6DShipSimulation PDFLenin ValerioNo ratings yet
- LOAD17: Cargo Loading, Discharging & Stowage ProceduresDocument37 pagesLOAD17: Cargo Loading, Discharging & Stowage ProceduresPrasad Prabhakaran100% (1)
- (Technical Information) (2010030 - ETC) (E)Document4 pages(Technical Information) (2010030 - ETC) (E)Lenin ValerioNo ratings yet
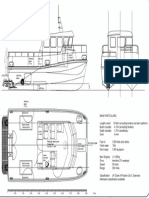
- Beaver 45 - Especificaão TécnicaDocument2 pagesBeaver 45 - Especificaão TécnicaLenin ValerioNo ratings yet
- 10 MCAT RevaDocument1 page10 MCAT RevaLenin ValerioNo ratings yet
- Fishing Vessel Stability in WavesDocument31 pagesFishing Vessel Stability in WavesLenin ValerioNo ratings yet
- Standard P&I - A-Masters-Guide-To-The-Carriage-Of-Steel-Cargo-2nd-Edition PDFDocument40 pagesStandard P&I - A-Masters-Guide-To-The-Carriage-Of-Steel-Cargo-2nd-Edition PDFvsorin83No ratings yet
- K.K.koh - 2012 - Comparison Study of A Pusher-Barge System in Shallow Water, Medium Shallow Water and Deep Water ConditionsDocument9 pagesK.K.koh - 2012 - Comparison Study of A Pusher-Barge System in Shallow Water, Medium Shallow Water and Deep Water ConditionsLenin ValerioNo ratings yet
- STAB 2009 s11-p2Document12 pagesSTAB 2009 s11-p2Lenin ValerioNo ratings yet
- Form 4 Additional Mathematics Revision PatDocument7 pagesForm 4 Additional Mathematics Revision PatJiajia LauNo ratings yet
- Advantages of Using Mobile ApplicationsDocument30 pagesAdvantages of Using Mobile ApplicationsGian Carlo LajarcaNo ratings yet
- Business Case PresentationDocument27 pagesBusiness Case Presentationapi-253435256No ratings yet
- Differential Pulse Code ModulationDocument12 pagesDifferential Pulse Code ModulationNarasimhareddy MmkNo ratings yet
- British Universal Steel Columns and Beams PropertiesDocument6 pagesBritish Universal Steel Columns and Beams PropertiesjagvishaNo ratings yet
- Computer Networks Transmission Media: Dr. Mohammad AdlyDocument14 pagesComputer Networks Transmission Media: Dr. Mohammad AdlyRichthofen Flies Bf109No ratings yet
- Lewis Corporation Case 6-2 - Group 5Document8 pagesLewis Corporation Case 6-2 - Group 5Om Prakash100% (1)
- Crystallizers: Chapter 16 Cost Accounting and Capital Cost EstimationDocument1 pageCrystallizers: Chapter 16 Cost Accounting and Capital Cost EstimationDeiver Enrique SampayoNo ratings yet
- Rubric 5th GradeDocument2 pagesRubric 5th GradeAlbert SantosNo ratings yet
- C4 ISRchapterDocument16 pagesC4 ISRchapterSerkan KalaycıNo ratings yet
- SNC 2p1 Course Overview 2015Document2 pagesSNC 2p1 Course Overview 2015api-212901753No ratings yet
- Qad Quick StartDocument534 pagesQad Quick StartMahadev Subramani100% (1)
- Price List PPM TerbaruDocument7 pagesPrice List PPM TerbaruAvip HidayatNo ratings yet
- There Is There Are Exercise 1Document3 pagesThere Is There Are Exercise 1Chindy AriestaNo ratings yet
- Baobab MenuDocument4 pagesBaobab Menuperseverence mahlamvanaNo ratings yet
- Consensus Building e Progettazione Partecipata - Marianella SclaviDocument7 pagesConsensus Building e Progettazione Partecipata - Marianella SclaviWilma MassuccoNo ratings yet
- Real Estate Broker ReviewerREBLEXDocument124 pagesReal Estate Broker ReviewerREBLEXMar100% (4)
- Duca Industries March 2023 pay slip for Dipankar MondalDocument1 pageDuca Industries March 2023 pay slip for Dipankar MondalPritam GoswamiNo ratings yet
- The Service Marketing Plan On " Expert Personalized Chef": Presented byDocument27 pagesThe Service Marketing Plan On " Expert Personalized Chef": Presented byA.S. ShuvoNo ratings yet
- Build A Program Remote Control IR Transmitter Using HT6221Document2 pagesBuild A Program Remote Control IR Transmitter Using HT6221rudraNo ratings yet
- Statistical Quality Control, 7th Edition by Douglas C. Montgomery. 1Document76 pagesStatistical Quality Control, 7th Edition by Douglas C. Montgomery. 1omerfaruk200141No ratings yet
- Test Bank For Fundamental Financial Accounting Concepts 10th by EdmondsDocument18 pagesTest Bank For Fundamental Financial Accounting Concepts 10th by Edmondsooezoapunitory.xkgyo4100% (47)
- Final Year Project (Product Recommendation)Document33 pagesFinal Year Project (Product Recommendation)Anurag ChakrabortyNo ratings yet
- Individual Performance Commitment and Review Form (Ipcrf) : Mfos Kras Objectives Timeline Weight Per KRADocument4 pagesIndividual Performance Commitment and Review Form (Ipcrf) : Mfos Kras Objectives Timeline Weight Per KRAChris21JinkyNo ratings yet
- BenchmarkDocument4 pagesBenchmarkKiran KumarNo ratings yet
- EC GATE 2017 Set I Key SolutionDocument21 pagesEC GATE 2017 Set I Key SolutionJeevan Sai MaddiNo ratings yet
- Training Customer CareDocument6 pagesTraining Customer Careyahya sabilNo ratings yet
- SBI Sample PaperDocument283 pagesSBI Sample Paperbeintouch1430% (1)
- Navistar O & M ManualDocument56 pagesNavistar O & M ManualMushtaq Hasan95% (20)
- Listening Exercise 1Document1 pageListening Exercise 1Ma. Luiggie Teresita PerezNo ratings yet
- Asset Integrity Management for Offshore and Onshore StructuresFrom EverandAsset Integrity Management for Offshore and Onshore StructuresNo ratings yet
- Industrial Piping and Equipment Estimating ManualFrom EverandIndustrial Piping and Equipment Estimating ManualRating: 5 out of 5 stars5/5 (7)
- Machine Learning and Data Science in the Oil and Gas Industry: Best Practices, Tools, and Case StudiesFrom EverandMachine Learning and Data Science in the Oil and Gas Industry: Best Practices, Tools, and Case StudiesPatrick BangertRating: 3 out of 5 stars3/5 (2)
- Hydraulic Fracturing in Unconventional Reservoirs: Theories, Operations, and Economic AnalysisFrom EverandHydraulic Fracturing in Unconventional Reservoirs: Theories, Operations, and Economic AnalysisNo ratings yet
- Machinery Lubrication Technician (MLT) I and II Certification Exam GuideFrom EverandMachinery Lubrication Technician (MLT) I and II Certification Exam GuideRating: 2 out of 5 stars2/5 (1)
- Pocket Guide to Flanges, Fittings, and Piping DataFrom EverandPocket Guide to Flanges, Fittings, and Piping DataRating: 3.5 out of 5 stars3.5/5 (22)
- Oil and Gas Pipelines and Piping Systems: Design, Construction, Management, and InspectionFrom EverandOil and Gas Pipelines and Piping Systems: Design, Construction, Management, and InspectionRating: 4.5 out of 5 stars4.5/5 (16)
- Pipeline Integrity: Management and Risk EvaluationFrom EverandPipeline Integrity: Management and Risk EvaluationRating: 4.5 out of 5 stars4.5/5 (6)
- Well Control for Completions and InterventionsFrom EverandWell Control for Completions and InterventionsRating: 4 out of 5 stars4/5 (10)
- Biostratigraphic and Geological Significance of Planktonic ForaminiferaFrom EverandBiostratigraphic and Geological Significance of Planktonic ForaminiferaRating: 4 out of 5 stars4/5 (5)
- Practical Reservoir Engineering and CharacterizationFrom EverandPractical Reservoir Engineering and CharacterizationRating: 4.5 out of 5 stars4.5/5 (3)
- Practical Wellbore Hydraulics and Hole Cleaning: Unlock Faster, more Efficient, and Trouble-Free Drilling OperationsFrom EverandPractical Wellbore Hydraulics and Hole Cleaning: Unlock Faster, more Efficient, and Trouble-Free Drilling OperationsRating: 5 out of 5 stars5/5 (1)
- Black Gold Stranglehold: The Myth of Scarcity and the Politics of OilFrom EverandBlack Gold Stranglehold: The Myth of Scarcity and the Politics of OilNo ratings yet
- Deepwater Drilling: Well Planning, Design, Engineering, Operations, and Technology ApplicationFrom EverandDeepwater Drilling: Well Planning, Design, Engineering, Operations, and Technology ApplicationRating: 4.5 out of 5 stars4.5/5 (2)
- Internal Combustion: How Corporations and Governments Addicted the World to Oil and Subverted the AlternativesFrom EverandInternal Combustion: How Corporations and Governments Addicted the World to Oil and Subverted the AlternativesRating: 4 out of 5 stars4/5 (2)
- Oil & Gas Design Engineering Guide Book: Useful Practices and Equipment & SystemsFrom EverandOil & Gas Design Engineering Guide Book: Useful Practices and Equipment & SystemsNo ratings yet
- Asphaltene Deposition Control by Chemical Inhibitors: Theoretical and Practical ProspectsFrom EverandAsphaltene Deposition Control by Chemical Inhibitors: Theoretical and Practical ProspectsNo ratings yet
- Risk Management in the Oil and Gas Industry: Offshore and Onshore Concepts and Case StudiesFrom EverandRisk Management in the Oil and Gas Industry: Offshore and Onshore Concepts and Case StudiesNo ratings yet
- Prevention of Valve Fugitive Emissions in the Oil and Gas IndustryFrom EverandPrevention of Valve Fugitive Emissions in the Oil and Gas IndustryNo ratings yet