You might also like
- Zahra-HV Cables - Aug 2010Document66 pagesZahra-HV Cables - Aug 2010Yvonne TohNo ratings yet
- HE Drilling JarsDocument32 pagesHE Drilling Jarsmr_heeraNo ratings yet
- Installation and Setup Guide For The Cisco Active Directory Agent, Release 1.0Document62 pagesInstallation and Setup Guide For The Cisco Active Directory Agent, Release 1.0Madelaine Velasquez Blacutt100% (1)
- Semiconductor Diode Characteristics and Power Diode ConstructionDocument6 pagesSemiconductor Diode Characteristics and Power Diode ConstructionGagneNo ratings yet
- SUPERCAP Basic ConceptDocument145 pagesSUPERCAP Basic ConceptWaldyr Yassuo KamakuraNo ratings yet
- Step, Touch and Transferred Voltages in SubstationsDocument11 pagesStep, Touch and Transferred Voltages in SubstationsMuhammad Asif IqbalNo ratings yet
- SS 316 01Document12 pagesSS 316 01Muhammad Asif IqbalNo ratings yet
- Power semiconductor diodes and circuits: key characteristics and specificationsDocument20 pagesPower semiconductor diodes and circuits: key characteristics and specificationsHassan FrazNo ratings yet
- Cross Field Tubes and Microwave Semiconductor DevicesDocument74 pagesCross Field Tubes and Microwave Semiconductor DevicesPranav KasliwalNo ratings yet
- The Effect of Electrode Contact Resistance on Electric Field MeasurementsDocument8 pagesThe Effect of Electrode Contact Resistance on Electric Field Measurementsjavicol70No ratings yet
- UNIT 3 - Student - SDocument62 pagesUNIT 3 - Student - SBabuRao ApteNo ratings yet
- High Voltage EngineeringDocument36 pagesHigh Voltage EngineeringsukandeNo ratings yet
- RF Ceramic Chip Capacitors in High RF Power ApplicationsDocument6 pagesRF Ceramic Chip Capacitors in High RF Power ApplicationsLuke GomezNo ratings yet
- Mohamed Abd Elwahab Ali - Chapter 3. Power CablesDocument56 pagesMohamed Abd Elwahab Ali - Chapter 3. Power CablesraghvendraNo ratings yet
- Underground CablesDocument55 pagesUnderground Cableswaheed azizNo ratings yet
- World Over The Levels Are Classified AsDocument9 pagesWorld Over The Levels Are Classified AsSylvesterJuniorNo ratings yet
- Partial Discharge Analysis For Insulation Systems of Electric Rotating Machines With Various Voltage StressDocument4 pagesPartial Discharge Analysis For Insulation Systems of Electric Rotating Machines With Various Voltage StressShakeel BalochNo ratings yet
- Lighning Prblms2003 1Document52 pagesLighning Prblms2003 1Sithumini SankalpanaNo ratings yet
- Voltage and Current RatingsDocument1 pageVoltage and Current RatingsArmanNo ratings yet
- Ch20.PDF Power ElecDocument48 pagesCh20.PDF Power ElecChamps LalaniNo ratings yet
- Mwe Chapter 4Document74 pagesMwe Chapter 4bhavaniNo ratings yet
- 175 - Bleskoistky - GDTDocument6 pages175 - Bleskoistky - GDTMoamen MohamedNo ratings yet
- The Spark TransmitterDocument10 pagesThe Spark TransmitterZdenko PopNo ratings yet
- Gunn Diodes Application Note: TEOS, Cavity Design, Noise & StabilityDocument4 pagesGunn Diodes Application Note: TEOS, Cavity Design, Noise & StabilityAr-Jay O PanoyNo ratings yet
- Cables For EE342 CourseDocument7 pagesCables For EE342 Coursemahmab70No ratings yet
- Cross Field Tubes and Microwave Semiconductor DevicesDocument91 pagesCross Field Tubes and Microwave Semiconductor Devicesuday kumarNo ratings yet
- On AC ResistanceDocument4 pagesOn AC ResistancesreedharNo ratings yet
- Earth Electrode Resistance PDFDocument28 pagesEarth Electrode Resistance PDFChathura PriyankaNo ratings yet
- Module 1 Lecture 1 - 4Document17 pagesModule 1 Lecture 1 - 4ukassyahNo ratings yet
- Heating in Aluminum Electrolytic CapacitorsDocument10 pagesHeating in Aluminum Electrolytic CapacitorsDora EmonNo ratings yet
- Introduction to Power Semiconductors and Their ApplicationsDocument117 pagesIntroduction to Power Semiconductors and Their ApplicationsViraj MotivarasNo ratings yet
- Unit-I PEDocument40 pagesUnit-I PEmohiddinkhanNo ratings yet
- ESP Rectifier transformer components and operationDocument35 pagesESP Rectifier transformer components and operationksbbs50% (2)
- 75.eddy Current Loss CalculationDocument9 pages75.eddy Current Loss CalculationVenkateswaran venkateswaranNo ratings yet
- Application Guide: Designing RC Snubber NetworksDocument3 pagesApplication Guide: Designing RC Snubber NetworksThrawn Mitth'rawnuruodoNo ratings yet
- Mmce 1046Document11 pagesMmce 1046YumnaNo ratings yet
- POWER ELECTRONICS SOLUTIONSDocument9 pagesPOWER ELECTRONICS SOLUTIONSJ JulietNo ratings yet
- Dielectric Properties of Ceramics: Understanding Dielectric Constant, Loss and Strength (EBB 443Document38 pagesDielectric Properties of Ceramics: Understanding Dielectric Constant, Loss and Strength (EBB 443kanita_jaww100% (1)
- Heberlein 2009Document32 pagesHeberlein 2009chevroletNo ratings yet
- Power loss due to Corona on HV transmission linesDocument6 pagesPower loss due to Corona on HV transmission lineslimkokchiang809No ratings yet
- Underground Cable 2Document39 pagesUnderground Cable 2Ranajoy BhattacharjeeNo ratings yet
- Cable Layout and System Design (High Voltage XLPE Cable Systems Techincal User Guide) 13-09-17Document6 pagesCable Layout and System Design (High Voltage XLPE Cable Systems Techincal User Guide) 13-09-17anamulk-1No ratings yet
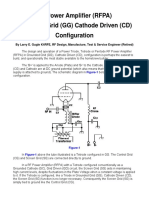
- RF Power Amplifier (RFPA) Grounded Grid (GG) Cathode Driven (CD) ConfigurationDocument14 pagesRF Power Amplifier (RFPA) Grounded Grid (GG) Cathode Driven (CD) ConfigurationAjvanhoe AjvanhoeNo ratings yet
- Eytu Lecture4Document57 pagesEytu Lecture4David MurilloNo ratings yet
- Electrical Characteristics of Underground CablesDocument55 pagesElectrical Characteristics of Underground CablesAhmed SeddikNo ratings yet
- Speaker Cables - AudioXpress - 504hansen1203Document11 pagesSpeaker Cables - AudioXpress - 504hansen1203caca recoNo ratings yet
- Corona LectureDocument22 pagesCorona LectureSangeen PanezaiNo ratings yet
- ELECTRICAL PHENOMENA AND CAPACITORSDocument17 pagesELECTRICAL PHENOMENA AND CAPACITORSDzaky PratamaNo ratings yet
- Permanent Magnet Alternator theory sessionDocument27 pagesPermanent Magnet Alternator theory sessionseikh_aiNo ratings yet
- Understanding Power MosfetsDocument5 pagesUnderstanding Power MosfetsIskander XandrosNo ratings yet
- Applicationnote: High Power Wireless Power Transfer For The Industrial EnvironmentDocument25 pagesApplicationnote: High Power Wireless Power Transfer For The Industrial EnvironmentMani RathnamNo ratings yet
- SHORT CIRCUIT WITHSTAND OF POWER CABLESDocument42 pagesSHORT CIRCUIT WITHSTAND OF POWER CABLESDheeraj Yadav100% (1)
- UNIT 4 Microwave TubesDocument39 pagesUNIT 4 Microwave TubesSnigdha SidduNo ratings yet
- PDF Generaltechnicalinformation PDFDocument21 pagesPDF Generaltechnicalinformation PDFsudershan rawatNo ratings yet
- Sic Mos Trench Wipda.2018.8569070Document5 pagesSic Mos Trench Wipda.2018.8569070terry chenNo ratings yet
- W8 - Lecture 8 Updated (1) - 220418 - 123943Document34 pagesW8 - Lecture 8 Updated (1) - 220418 - 123943saiedali2005No ratings yet
- Dielectrics and optical properties of materialsDocument126 pagesDielectrics and optical properties of materials1MM1R HL'No ratings yet
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1From EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1No ratings yet
- Feynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterFrom EverandFeynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterNo ratings yet
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 3From EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 3Rating: 3 out of 5 stars3/5 (2)
- A Study For Optimum Productivity Yield in 0.16 M Mixed of Wafer Fabrication FacilityDocument4 pagesA Study For Optimum Productivity Yield in 0.16 M Mixed of Wafer Fabrication FacilitykamaveriyanNo ratings yet
- Data SheetDocument4 pagesData SheetkamaveriyanNo ratings yet
- Panel Mounting Base - SACC-MSQ-P-M12MS-25-2,7 SCO: Jul 15, 2021, 12:00 PM Page 1Document6 pagesPanel Mounting Base - SACC-MSQ-P-M12MS-25-2,7 SCO: Jul 15, 2021, 12:00 PM Page 1kamaveriyanNo ratings yet
- Schneider Electric Industries: Date: Tuesday, March 15, 2022Document2 pagesSchneider Electric Industries: Date: Tuesday, March 15, 2022kamaveriyanNo ratings yet
- E3x DaDocument3 pagesE3x DakamaveriyanNo ratings yet
- 213Document8 pages213kamaveriyanNo ratings yet
- Ca781, Pre Assembled Shorting Link, Jumper, Cross Connection, Cross Connection BridgeDocument1 pageCa781, Pre Assembled Shorting Link, Jumper, Cross Connection, Cross Connection BridgekamaveriyanNo ratings yet
- Low Voltage General Purpose Transformers - 10S67FDocument2 pagesLow Voltage General Purpose Transformers - 10S67FkamaveriyanNo ratings yet
- Positronic Industries Inc. FC4012D: SK2415 ECO B 23033 TK Yk Cole ECO C 52574 Cole CM ColeDocument1 pagePositronic Industries Inc. FC4012D: SK2415 ECO B 23033 TK Yk Cole ECO C 52574 Cole CM ColekamaveriyanNo ratings yet
- 021c99s2c06 PDFDocument36 pages021c99s2c06 PDFkamaveriyanNo ratings yet
- Form 12BB in Word FormatDocument2 pagesForm 12BB in Word Formatvizay237_430788222No ratings yet
- ANSI Codes PDFDocument3 pagesANSI Codes PDFelectrical_1012000100% (2)
- 021 C 99 S 2 C 06Document36 pages021 C 99 S 2 C 06M. SaadNo ratings yet
- CTSPC3 1Document1 pageCTSPC3 1kamaveriyanNo ratings yet
- MDDocument2 pagesMDkamaveriyanNo ratings yet
- LV Branch RatedDocument32 pagesLV Branch RatedkamaveriyanNo ratings yet
- J. R. Lucas - Three Phase TheoryDocument19 pagesJ. R. Lucas - Three Phase TheoryQM_2010No ratings yet
- Analog & Digital BasicsDocument1 pageAnalog & Digital BasicskamaveriyanNo ratings yet
- Annex 3: Power Theory With Non-Sinusoidal WaveformsDocument25 pagesAnnex 3: Power Theory With Non-Sinusoidal WaveformskamaveriyanNo ratings yet
- J. R. Lucas - Three Phase TheoryDocument19 pagesJ. R. Lucas - Three Phase TheoryQM_2010No ratings yet
- BJT2Document12 pagesBJT2swan1619No ratings yet
- BJT2Document12 pagesBJT2swan1619No ratings yet
- List of Top 100 BSE and NSE Listed Companies Arranged by SectorsDocument73 pagesList of Top 100 BSE and NSE Listed Companies Arranged by SectorskamaveriyanNo ratings yet
- List of Top 100 BSE and NSE Listed Companies Arranged by SectorsDocument5 pagesList of Top 100 BSE and NSE Listed Companies Arranged by SectorsChintan JoshiNo ratings yet
- Start Delta Starter Vs Soft StarterDocument24 pagesStart Delta Starter Vs Soft StarterKalpesh Singh100% (2)
- Pops PDFDocument1 pagePops PDFkamaveriyanNo ratings yet
- Pops PDFDocument1 pagePops PDFkamaveriyanNo ratings yet
- Cts25Un: CONNECTWELL INDUSTRIES PVT. LTD. - D7, Phase 2, M.I.D.C., Dombivli (E), Maharashtra, India - 421 204Document3 pagesCts25Un: CONNECTWELL INDUSTRIES PVT. LTD. - D7, Phase 2, M.I.D.C., Dombivli (E), Maharashtra, India - 421 204kamaveriyanNo ratings yet
- Okken3 PDFDocument9 pagesOkken3 PDFkamaveriyanNo ratings yet
- Charger Energic Plus (Catalog)Document24 pagesCharger Energic Plus (Catalog)sugar44No ratings yet
- Network Termination Unit STU4: Suppor Ting SHDSL - BisDocument2 pagesNetwork Termination Unit STU4: Suppor Ting SHDSL - BisНатальяNo ratings yet
- 4 UIUm 8 JHNDQ 8 Suj H4 NsoDocument8 pages4 UIUm 8 JHNDQ 8 Suj H4 NsoAkash SadoriyaNo ratings yet
- Answer All The Questions. No Negative Marks For Wrong Answers. Please Do Not Mark Anything On The Question PaperDocument13 pagesAnswer All The Questions. No Negative Marks For Wrong Answers. Please Do Not Mark Anything On The Question PaperMainak DeNo ratings yet
- Lsi/Csi: 24-Bit Dual-Axis Quadrature CounterDocument12 pagesLsi/Csi: 24-Bit Dual-Axis Quadrature CounterWilliam Méndez PérezNo ratings yet
- Student's Error Analysis in Finishing Mathematic Word Problem Based Newman AnalysisDocument11 pagesStudent's Error Analysis in Finishing Mathematic Word Problem Based Newman AnalysisguanyitorNo ratings yet
- Size Reduction LectureDocument28 pagesSize Reduction Lectureapsara karkiNo ratings yet
- Hysys For Aspen Plus Users PDFDocument11 pagesHysys For Aspen Plus Users PDFKarim KholeifNo ratings yet
- Sisweb Sisweb Techdoc Techdoc Print Pag - pdf1Document91 pagesSisweb Sisweb Techdoc Techdoc Print Pag - pdf1MatiussChesteerNo ratings yet
- Vikramraju Updated Excel (EXCEL GOODIES)Document40 pagesVikramraju Updated Excel (EXCEL GOODIES)vikramrajuu0% (1)
- Digital-To-Analog Converter ICs SB Vol11 Issue5Document12 pagesDigital-To-Analog Converter ICs SB Vol11 Issue5Hooman KaabiNo ratings yet
- Operation Manual Zoomlion QY40Document133 pagesOperation Manual Zoomlion QY40Hải Tiến100% (1)
- Computer Science Project On Management SystemDocument26 pagesComputer Science Project On Management Systemsajid aliNo ratings yet
- Quiz6 AnswerDocument8 pagesQuiz6 AnswerTrí Tạ MinhNo ratings yet
- 1 Gauss SeidelDocument20 pages1 Gauss SeidelYanes Kristianus HediNo ratings yet
- Project PPTDocument47 pagesProject PPTIshant KumawatNo ratings yet
- DocDocument6 pagesDocapi-287506055No ratings yet
- Electrochemical Cleaningof Artificially Tarnished SilverDocument11 pagesElectrochemical Cleaningof Artificially Tarnished SilverRahmi Nur Anisah Nasution 2003114489No ratings yet
- Application of Nitrous Oxide in AutomobilesDocument26 pagesApplication of Nitrous Oxide in AutomobilesMohammed NuhmanNo ratings yet
- Erection Manual Hydro-1Document63 pagesErection Manual Hydro-1rajfab100% (1)
- ParkerDocument106 pagesParkerJoseJSanchezNo ratings yet
- Doubble EncriptionDocument60 pagesDoubble Encriptiondeepak kumarNo ratings yet
- Sabp G 007Document8 pagesSabp G 007Li PengNo ratings yet
- House of CardsDocument2 pagesHouse of CardsHello misterNo ratings yet
- 01 - Lesson Plan - Fractions - Decimal - PercentDocument4 pages01 - Lesson Plan - Fractions - Decimal - PercentAnthony MontoyaNo ratings yet
- Mebs7014 2223 03Document78 pagesMebs7014 2223 03Yuki ChanNo ratings yet
- Problems On Heat Transfer ConductionDocument3 pagesProblems On Heat Transfer ConductionGenerale, Rey marck C.No ratings yet
- Technical manual for Felt Compulsion mountain bike suspension systemDocument15 pagesTechnical manual for Felt Compulsion mountain bike suspension systemDiogo SilvaNo ratings yet