You might also like
- Nonlinear Programming and Process OptimizationDocument224 pagesNonlinear Programming and Process OptimizationLina Angarita HerreraNo ratings yet
- Dynamic Programming Handout - : 14.451 Recitation, February 18, 2005 - Todd GormleyDocument11 pagesDynamic Programming Handout - : 14.451 Recitation, February 18, 2005 - Todd GormleyenkelonNo ratings yet
- Additional Exercises For Convex Optimization PDFDocument187 pagesAdditional Exercises For Convex Optimization PDFCliffordTorresNo ratings yet
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- Notes On Social Choice and Mechanism Design Econ 8104, Spring 2009, Kim Sau ChungDocument27 pagesNotes On Social Choice and Mechanism Design Econ 8104, Spring 2009, Kim Sau ChungMegan JohnstonNo ratings yet
- EconometricsDocument310 pagesEconometricsHerwan GalinggingNo ratings yet
- Implicit Function Theorem Well DoneDocument20 pagesImplicit Function Theorem Well DoneCarolina Torres Lozano ΨNo ratings yet
- Micro Prelim SolutionsDocument32 pagesMicro Prelim SolutionsMegan JohnstonNo ratings yet
- MWG Microeconomic Theory NotesDocument102 pagesMWG Microeconomic Theory Notes胡卉然No ratings yet
- 2011 Micro Homework3 PDFDocument4 pages2011 Micro Homework3 PDFEdmund Zin100% (1)
- Introduction To Advanced MacroeconomicsDocument6 pagesIntroduction To Advanced MacroeconomicsnantukodxNo ratings yet
- Implicit Function TheoremDocument52 pagesImplicit Function TheoremabraksaNo ratings yet
- Ps7 SolutionDocument6 pagesPs7 SolutionRagini ChaurasiaNo ratings yet
- Mid Session Exam SolutionsDocument20 pagesMid Session Exam SolutionssaravanansatkumaranNo ratings yet
- Osborne Extra ProblemsDocument1 pageOsborne Extra ProblemsBorisTurkinNo ratings yet
- Mathematics For Economics (Implicit Function Theorm)Document10 pagesMathematics For Economics (Implicit Function Theorm)ARUPARNA MAITYNo ratings yet
- Markov Chains Guidebook: Discrete Time Models and ApplicationsDocument23 pagesMarkov Chains Guidebook: Discrete Time Models and ApplicationsSofoklisNo ratings yet
- Macro AssignmentDocument28 pagesMacro AssignmentSabin SadafNo ratings yet
- Optimal Control TheoryDocument20 pagesOptimal Control TheoryOmar KeNo ratings yet
- Problems and Solutions in Real and Complex AnalysiDocument82 pagesProblems and Solutions in Real and Complex AnalysiahjeNo ratings yet
- 18 - Irreducible Tensor Operators and The Wigner-Eckart Theorem PDFDocument30 pages18 - Irreducible Tensor Operators and The Wigner-Eckart Theorem PDFUltrazordNo ratings yet
- Chapter 2: Introduction To MATLAB Programming ExercisesDocument19 pagesChapter 2: Introduction To MATLAB Programming Exerciseskhushi maheshwariNo ratings yet
- Math for Econ Lecture NotesDocument105 pagesMath for Econ Lecture Noteshadi.salami3684No ratings yet
- Rice ECO501 LecturesDocument172 pagesRice ECO501 LecturesIu ManNo ratings yet
- MC and Jehle Partial Sol Manual PDFDocument31 pagesMC and Jehle Partial Sol Manual PDFimjusta kidNo ratings yet
- Lecture Notes on Game TheoryDocument167 pagesLecture Notes on Game TheoryDiego Velasquez ZuñigaNo ratings yet
- Lagrangian Dynamics and Variational PrinciplesDocument107 pagesLagrangian Dynamics and Variational Principlesvc94No ratings yet
- Homework #5: MA 402 Mathematics of Scientific Computing Due: Monday, September 27Document6 pagesHomework #5: MA 402 Mathematics of Scientific Computing Due: Monday, September 27ra100% (1)
- About The MS Regression ModelsDocument17 pagesAbout The MS Regression ModelsLars LarsonNo ratings yet
- SVAR Notes: Learn in PersonDocument19 pagesSVAR Notes: Learn in PersonEconometrics FreelancerNo ratings yet
- Answers ManualDocument73 pagesAnswers Manualflyekelly0% (1)
- Time Series Solution ManualDocument147 pagesTime Series Solution ManualA.s. CharanNo ratings yet
- Harvard Economics 2020a Problem Set 4Document4 pagesHarvard Economics 2020a Problem Set 4J100% (1)
- Stochastic Modelling 2000-2004Document189 pagesStochastic Modelling 2000-2004Brian KufahakutizwiNo ratings yet
- General Equilibrium Theory Lecture NotesDocument128 pagesGeneral Equilibrium Theory Lecture Notesmeagon_cjNo ratings yet
- Lecture Notes On Differential EquationsDocument156 pagesLecture Notes On Differential EquationsAyesha KhanNo ratings yet
- CES Prodn FNDocument4 pagesCES Prodn FNspmisraNo ratings yet
- Mailath - Economics703 Microeconomics II Modelling Strategic BehaviorDocument264 pagesMailath - Economics703 Microeconomics II Modelling Strategic BehaviorMichelle LeNo ratings yet
- Dynamic Programming Value IterationDocument36 pagesDynamic Programming Value Iterationernestdautovic100% (1)
- Hayashi CH 1 AnswersDocument4 pagesHayashi CH 1 AnswersLauren spNo ratings yet
- Problem Set 2021Document63 pagesProblem Set 2021Co londota2No ratings yet
- SOLUTIONs Introduction Dynamic Macroeconomic TheoryDocument9 pagesSOLUTIONs Introduction Dynamic Macroeconomic TheoryAdelaido García AndrésNo ratings yet
- Nonlinear Control, Supplementary Notes To Khalil's Nonlinear Systems - Rafael WisniewskiDocument19 pagesNonlinear Control, Supplementary Notes To Khalil's Nonlinear Systems - Rafael WisniewskiMustafa KösemNo ratings yet
- Stochastic Processes NotesDocument22 pagesStochastic Processes Notesels_872100% (1)
- Solucionario Games and Information RasmusenDocument106 pagesSolucionario Games and Information RasmusenByron Bravo GNo ratings yet
- Solution CH # 5Document39 pagesSolution CH # 5Al FarabiNo ratings yet
- About The MS Regress PackageDocument28 pagesAbout The MS Regress PackagegliptakNo ratings yet
- Midterm Exam SolutionsDocument8 pagesMidterm Exam Solutionsosw2002No ratings yet
- Guided Tour On VAR Innovation Response AnalysisDocument45 pagesGuided Tour On VAR Innovation Response AnalysisrunawayyyNo ratings yet
- RL FrontmatterDocument11 pagesRL FrontmatterChainszzNo ratings yet
- Hyperbolic FunctionDocument5 pagesHyperbolic FunctionSaimo MghaseNo ratings yet
- An Overview of The Hamilton-Jacobi Equation - 21Document21 pagesAn Overview of The Hamilton-Jacobi Equation - 21John BirdNo ratings yet
- MSM Specification: Discrete TimeDocument5 pagesMSM Specification: Discrete TimeNicolas MarionNo ratings yet
- Statistical Signal ProcessingDocument125 pagesStatistical Signal Processingchegu.balaji100% (3)
- Applied Nonlinear Analysis: Proceedings of an International Conference on Applied Nonlinear Analysis, Held at the University of Texas at Arlington, Arlington, Texas, April 20–22, 1978From EverandApplied Nonlinear Analysis: Proceedings of an International Conference on Applied Nonlinear Analysis, Held at the University of Texas at Arlington, Arlington, Texas, April 20–22, 1978No ratings yet
- Introduction to the Theory of Linear Partial Differential EquationsFrom EverandIntroduction to the Theory of Linear Partial Differential EquationsNo ratings yet
- The Economics of Inaction: Stochastic Control Models with Fixed CostsFrom EverandThe Economics of Inaction: Stochastic Control Models with Fixed CostsNo ratings yet
- FX Talking: Some Stark DivergenceDocument15 pagesFX Talking: Some Stark DivergencebobmezzNo ratings yet
- Towards A Theory of Volatility Trading: Cambridge Books Online © Cambridge University Press, 2010Document19 pagesTowards A Theory of Volatility Trading: Cambridge Books Online © Cambridge University Press, 2010bobmezzNo ratings yet
- ING Think Rates Spark Shifting GroundsDocument6 pagesING Think Rates Spark Shifting GroundsbobmezzNo ratings yet
- 1 Discrete-Time Markov ChainsDocument7 pages1 Discrete-Time Markov ChainsbobmezzNo ratings yet
- A Tutorial On Principal Component AnalysisDocument12 pagesA Tutorial On Principal Component AnalysisCristóbal Alberto Campos MuñozNo ratings yet
- The Convexity Maven: "Building A Better Volatility Mousetrap"Document13 pagesThe Convexity Maven: "Building A Better Volatility Mousetrap"bobmezzNo ratings yet
- Applied Probability: Nathana El Berestycki, University of Cambridge Part II, Lent 2014Document32 pagesApplied Probability: Nathana El Berestycki, University of Cambridge Part II, Lent 2014bobmezzNo ratings yet
- 1 IEOR 4701: Continuous-Time Markov ChainsDocument22 pages1 IEOR 4701: Continuous-Time Markov ChainsbobmezzNo ratings yet
- c1Document68 pagesc1dey_zicoNo ratings yet
- 4703 07 Notes PP NSPPDocument9 pages4703 07 Notes PP NSPPМилан МишићNo ratings yet
- 1 Communication Classes and Irreducibility For Markov ChainsDocument8 pages1 Communication Classes and Irreducibility For Markov ChainsbobmezzNo ratings yet
- Learning from interest rate implied volatilitiesDocument85 pagesLearning from interest rate implied volatilitiesbobmezzNo ratings yet
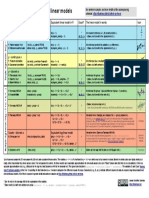
- Common Statistical Tests Are Linear ModelsDocument1 pageCommon Statistical Tests Are Linear ModelsbobmezzNo ratings yet
- Statistical Properties of Forward Libor RatesDocument33 pagesStatistical Properties of Forward Libor RatesbobmezzNo ratings yet
- Pca Portfolio SelectionDocument18 pagesPca Portfolio Selectionluli_kbreraNo ratings yet
- Elices - 2013 - Infoline - The Role of The Model Validation Function To Manage and Mitigate Model RiskDocument32 pagesElices - 2013 - Infoline - The Role of The Model Validation Function To Manage and Mitigate Model RiskbobmezzNo ratings yet
- Transelliptical Component Analysis: Johns Hopkins University Princeton UniversityDocument26 pagesTranselliptical Component Analysis: Johns Hopkins University Princeton UniversitybobmezzNo ratings yet
- A Tutorial On Principal Component AnalysisDocument12 pagesA Tutorial On Principal Component AnalysisCristóbal Alberto Campos MuñozNo ratings yet
- Global Cycle Notes Hope Springs EternalDocument27 pagesGlobal Cycle Notes Hope Springs EternalbobmezzNo ratings yet
- Siegel ParadoxDocument4 pagesSiegel ParadoxbobmezzNo ratings yet
- Market Volatility BulletinDocument28 pagesMarket Volatility BulletinbobmezzNo ratings yet
- Derivatives Across Asset ClassesDocument59 pagesDerivatives Across Asset ClassesbobmezzNo ratings yet
- FX Talking: Dovish Fed, Calm Seas - What Could Go Wrong?Document15 pagesFX Talking: Dovish Fed, Calm Seas - What Could Go Wrong?bobmezzNo ratings yet
- Global Markets Analyst - Top Ten Market Themes For 2021 - A Shot in The ArmDocument23 pagesGlobal Markets Analyst - Top Ten Market Themes For 2021 - A Shot in The ArmbobmezzNo ratings yet
- Measuring cross-gamma riskDocument16 pagesMeasuring cross-gamma riskbobmezzNo ratings yet
- Rate Curves For Forward Euribor Estimation and CSA-Discounting, AmetranoDocument94 pagesRate Curves For Forward Euribor Estimation and CSA-Discounting, AmetranosindhusrivastavaNo ratings yet
- Gatheral 1Document18 pagesGatheral 1Zhenhuan Song100% (1)
- GS Inflation Implementation 10-20Document20 pagesGS Inflation Implementation 10-20bobmezzNo ratings yet
- GARCH Models in Python 1Document31 pagesGARCH Models in Python 1visNo ratings yet
- Berenberg Global ForecastsDocument15 pagesBerenberg Global ForecastsbobmezzNo ratings yet
- Openmrs GuideDocument106 pagesOpenmrs Guidezidia84No ratings yet
- AI Assignment Problems and TechniquesDocument4 pagesAI Assignment Problems and TechniquesJasmin YadavNo ratings yet
- PSG College Numerical Analysis ProblemsDocument2 pagesPSG College Numerical Analysis ProblemsPriyadarshini Krishnaswamy100% (1)
- WWW - Manaresults.Co - In: (Information Technology)Document2 pagesWWW - Manaresults.Co - In: (Information Technology)mallesandeepNo ratings yet
- HV SR Manual Aaaaaaaaaaaaaaaaaaaaa AaaaaaaaaaaaaaaaaaaaaaDocument22 pagesHV SR Manual Aaaaaaaaaaaaaaaaaaaaa AaaaaaaaaaaaaaaaaaaaaaPanji HoetomoNo ratings yet
- Tutorials Face - Music Player With Notification and Lock Screen ControlsDocument31 pagesTutorials Face - Music Player With Notification and Lock Screen ControlsĐông thành đạiNo ratings yet
- Compression and Decompression of Embedded System CodesDocument6 pagesCompression and Decompression of Embedded System CodesstealthcenaNo ratings yet
- Fine-Tuning The AI in Rupeck's Procgen Platformer CaveblazersDocument5 pagesFine-Tuning The AI in Rupeck's Procgen Platformer CaveblazersMyNameNo ratings yet
- Project Report ErpDocument29 pagesProject Report ErpasgyNo ratings yet
- Culvert analysis spreadsheetDocument24 pagesCulvert analysis spreadsheetSubash KathiresanNo ratings yet
- Presented To: Dr. Rasha WaheebDocument72 pagesPresented To: Dr. Rasha WaheebHanyElSaman50% (2)
- New Zealand Mathematical Olympiad 2010 Squad Assignment TwoDocument6 pagesNew Zealand Mathematical Olympiad 2010 Squad Assignment TwoAlexandra ȘtefanNo ratings yet
- List of Documents ITIL Documentation Toolkit EN PDFDocument7 pagesList of Documents ITIL Documentation Toolkit EN PDFrkamundimuNo ratings yet
- Mayoor School student data projectDocument10 pagesMayoor School student data projectLakshit SharmaNo ratings yet
- Interview Qs on BAPI, RFC, ABAP Objects & TablesDocument4 pagesInterview Qs on BAPI, RFC, ABAP Objects & TablesGayathrisunil SunilNo ratings yet
- Ilp TableDocument4 pagesIlp Tableapi-237616956No ratings yet
- HDS AMS2500 - Getting Started GuideDocument36 pagesHDS AMS2500 - Getting Started GuidejemonterrosaNo ratings yet
- GT-S5253 UM Middle East, Africa English 20100903Document125 pagesGT-S5253 UM Middle East, Africa English 20100903McNair DannyNo ratings yet
- If It Moves They Will Watch ItDocument52 pagesIf It Moves They Will Watch It9elementsNo ratings yet
- Multiple Access Techniques LectureDocument23 pagesMultiple Access Techniques LecturefatimamanzoorNo ratings yet
- Zhang06 IJCVDocument28 pagesZhang06 IJCVHadi KheyruriNo ratings yet
- Company Profile::: M-01, Falaknaz View, Main Shahrah-E-Faisal, Near Wireless Gate Karachi, PakistanDocument3 pagesCompany Profile::: M-01, Falaknaz View, Main Shahrah-E-Faisal, Near Wireless Gate Karachi, PakistanZfNo ratings yet
- Types of GISDocument14 pagesTypes of GISpwnjha100% (1)
- Oracle TransactionDocument13 pagesOracle Transactiontri murdaniNo ratings yet
- Rosen7eExtraExamples0101 PDFDocument16 pagesRosen7eExtraExamples0101 PDFGörkem ÖzgürbüzNo ratings yet
- rt809h Mboot UpgredDocument7 pagesrt809h Mboot Upgredrabas_No ratings yet
- Customer AgeingDocument9 pagesCustomer AgeingAnagh PagareNo ratings yet
- 9 0 Required Comfhgponents For Installing The JD Edwards EnterpriseOne Tools 914 DraftDocument3 pages9 0 Required Comfhgponents For Installing The JD Edwards EnterpriseOne Tools 914 DraftEdward EdwardsNo ratings yet
- Shortcut AEDocument11 pagesShortcut AEAhmad basuniNo ratings yet
- Non-Linear Data Models: Anol Bhattacherjee, Ph.D. University of South FloridaDocument28 pagesNon-Linear Data Models: Anol Bhattacherjee, Ph.D. University of South FloridaSaitejNo ratings yet