You might also like
- Lidar Iris For Loop-Closure DetectionDocument7 pagesLidar Iris For Loop-Closure Detectionpepepe123jkghjkhNo ratings yet
- Lidar Fly BasicsDocument26 pagesLidar Fly BasicsRanti Dev VishwakarmaNo ratings yet
- Using Point CloudsDocument7 pagesUsing Point CloudsPANOSNo ratings yet
- Sensors 18 00177 v2Document14 pagesSensors 18 00177 v2Hậu PhạmNo ratings yet
- System For 3D Mapping Using Affordable LIDAR: Veličko Krsmanović, Marko Barjaktarović, and Ana Gavrovska, Member, IEEEDocument6 pagesSystem For 3D Mapping Using Affordable LIDAR: Veličko Krsmanović, Marko Barjaktarović, and Ana Gavrovska, Member, IEEEMUSTAPHA BERAMINo ratings yet
- Enabling Emerging Lidar Technologies with Open Source SoftwareDocument29 pagesEnabling Emerging Lidar Technologies with Open Source SoftwareAndronescu ClaudiuNo ratings yet
- Sensors 21 03445 v2Document31 pagesSensors 21 03445 v2Sarkar SurajitNo ratings yet
- Sensors: Radar Transformer: An Object Classification Network Based On 4D MMW Imaging RadarDocument16 pagesSensors: Radar Transformer: An Object Classification Network Based On 4D MMW Imaging RadarfakeNo ratings yet
- Pang 2019Document6 pagesPang 2019RAGHU PILLINo ratings yet
- Semantics-Aware Lidar-Only Pseudo Point Cloud Generation For 3D Object DetectionDocument7 pagesSemantics-Aware Lidar-Only Pseudo Point Cloud Generation For 3D Object Detectionsaimo0303No ratings yet
- CloudWorkDocument2 pagesCloudWorkELIEZER GUZMANNo ratings yet
- Convenient Plug-In Software For Using Laser Scans in AutocadDocument2 pagesConvenient Plug-In Software For Using Laser Scans in AutocadcristicomanNo ratings yet
- 2019 IVS Radarslam TuprintsDocument7 pages2019 IVS Radarslam TuprintsAsmaa HassanNo ratings yet
- Point Cloud Visualization in An Open Source 3D Glob3Document6 pagesPoint Cloud Visualization in An Open Source 3D Glob3sshadab_2No ratings yet
- Leica Pegasus MapFactory BRO enDocument4 pagesLeica Pegasus MapFactory BRO enpancaNo ratings yet
- CloudWorx PDMS enDocument2 pagesCloudWorx PDMS enxaaabbb_550464353No ratings yet
- Tutorial For Processing LiDAR Datasets and Visualization (For Slovenian Lidar)Document13 pagesTutorial For Processing LiDAR Datasets and Visualization (For Slovenian Lidar)ksk upNo ratings yet
- Lakes Aermod View Brochure PDFDocument4 pagesLakes Aermod View Brochure PDFaminNo ratings yet
- LIDAR Based Detection of Road Boundaries Using The Dens - 2021 - Robotics and AuDocument13 pagesLIDAR Based Detection of Road Boundaries Using The Dens - 2021 - Robotics and Aulihef14829No ratings yet
- Handout - 10279 - OG10279-Point Cloud To AutoCAD Plant 3DDocument15 pagesHandout - 10279 - OG10279-Point Cloud To AutoCAD Plant 3Dvivek100% (1)
- A Monocular Visual SLAM System Augmented by LightwDocument19 pagesA Monocular Visual SLAM System Augmented by LightwBENNANI MUSTAPHA1No ratings yet
- LIDAR Presentation SummaryDocument30 pagesLIDAR Presentation SummarySIDDHARTH NAHARNo ratings yet
- A Comprehensive Survey of LIDAR-based 3D Object Detection MethodsDocument29 pagesA Comprehensive Survey of LIDAR-based 3D Object Detection MethodsWilliam SantosNo ratings yet
- A Survey On 3D LiDAR Localization For Autonomous VehiclesDocument6 pagesA Survey On 3D LiDAR Localization For Autonomous VehiclesYifeng CaoNo ratings yet
- Saga First Steps - InitiereDocument18 pagesSaga First Steps - InitiereprvmihaiNo ratings yet
- Squeezesegv2: Improved Model Structure and Unsupervised Domain Adaptation For Road-Object Segmentation From A Lidar Point CloudDocument7 pagesSqueezesegv2: Improved Model Structure and Unsupervised Domain Adaptation For Road-Object Segmentation From A Lidar Point CloudArmandoNo ratings yet
- REPORTDocument24 pagesREPORTSahilNo ratings yet
- Improving Localization Accuracy For Autonomous Driving in Snow-Rain EnvironmentsDocument6 pagesImproving Localization Accuracy For Autonomous Driving in Snow-Rain EnvironmentsYifeng CaoNo ratings yet
- Advanced Point Cloud and Lidar ProcessingDocument2 pagesAdvanced Point Cloud and Lidar ProcessingMariam PerezNo ratings yet
- Electromagnetic Simulation and EM Modeling Software - WIPL-DDocument3 pagesElectromagnetic Simulation and EM Modeling Software - WIPL-DsdfgsdfgNo ratings yet
- LIDAR Based Object DetectionDocument3 pagesLIDAR Based Object DetectionSarthak BatraNo ratings yet
- GlobalMapper LiDAR PDFDocument2 pagesGlobalMapper LiDAR PDFscridbcasadoNo ratings yet
- How Lidar Technology and PCBs Are Changing The Craft of ManufacturingDocument13 pagesHow Lidar Technology and PCBs Are Changing The Craft of ManufacturingjackNo ratings yet
- Sensors: BLAINDER-A Blender AI Add-On For Generation of Semantically Labeled Depth-Sensing DataDocument28 pagesSensors: BLAINDER-A Blender AI Add-On For Generation of Semantically Labeled Depth-Sensing DataNina MouhoubNo ratings yet
- RangeDet in Defense of Range View For LiDAR-Based 3D Object ICCV 2021 PaperDocument10 pagesRangeDet in Defense of Range View For LiDAR-Based 3D Object ICCV 2021 Paper姜峰No ratings yet
- Skids Modeling: A Case StudyDocument2 pagesSkids Modeling: A Case Studysridhar.0094532No ratings yet
- Leica HxMap BRODocument2 pagesLeica HxMap BROandenetNo ratings yet
- Electronics 10 01224Document12 pagesElectronics 10 01224Karan Singh RawatNo ratings yet
- Cloudworx Microstation UsDocument2 pagesCloudworx Microstation Usguru4lifegmailcomNo ratings yet
- nanoCAD Plus & nanoCAD Pro - Smart Drafting, Smarter DesignsDocument2 pagesnanoCAD Plus & nanoCAD Pro - Smart Drafting, Smarter DesignsMKV Consulting EngineersNo ratings yet
- Squeeze SegDocument7 pagesSqueeze SegAditya JoshiNo ratings yet
- Real-time Lidar Odometry and Mapping Using LOAMDocument10 pagesReal-time Lidar Odometry and Mapping Using LOAMFALAK FATIMANo ratings yet
- Leica NOVA TechnologyDocument60 pagesLeica NOVA Technologyciora andreeaNo ratings yet
- Lidar-Histogram For Fast Road and Obstacle DetectionDocument6 pagesLidar-Histogram For Fast Road and Obstacle Detection花样吃鸡刘水水No ratings yet
- Leica Cyclone 3DRDocument2 pagesLeica Cyclone 3DRgilangwhpNo ratings yet
- Boosting LiDAR semantic labeling with cross-modal dataDocument16 pagesBoosting LiDAR semantic labeling with cross-modal dataGergely HornyakNo ratings yet
- Reading For All ReviewDocument13 pagesReading For All ReviewxxxNo ratings yet
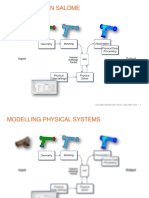
- Modelling and Analyzing Physical Systems with SALOMEDocument16 pagesModelling and Analyzing Physical Systems with SALOMEVeraniJNo ratings yet
- FPGA Adaptive Beamforming With HDL Coder and Zynq RFSoCDocument36 pagesFPGA Adaptive Beamforming With HDL Coder and Zynq RFSoCMatlab IEEENo ratings yet
- Israr Fyp Report1Document4 pagesIsrar Fyp Report1Haris KhanNo ratings yet
- Lego-Loam: Lightweight and Ground-Optimized Lidar Odometry and Mapping On Variable TerrainDocument8 pagesLego-Loam: Lightweight and Ground-Optimized Lidar Odometry and Mapping On Variable TerrainMetehan DoğanNo ratings yet
- Processing SAR Data Using RDA and Chirp Scaling AlgorithmsDocument40 pagesProcessing SAR Data Using RDA and Chirp Scaling AlgorithmsLin JunweiNo ratings yet
- Report CadDocument21 pagesReport CadMuhamad Ameenurrashid Ismail0% (1)
- Point Cloud Processing Software: Geotechnical Analysis Using Modern 3D Imaging TechnologiesDocument2 pagesPoint Cloud Processing Software: Geotechnical Analysis Using Modern 3D Imaging TechnologiesGiuseppe EspositoNo ratings yet
- RockMass Data Integration With Deswik - Mapping - Case StudyDocument11 pagesRockMass Data Integration With Deswik - Mapping - Case StudyCatarinoo100% (1)
- The Ipad Pro Built-In Lidar Sensor 3D Rapid MappinDocument7 pagesThe Ipad Pro Built-In Lidar Sensor 3D Rapid MappinTarigas Septiana NikenNo ratings yet
- Proceedings of SpieDocument10 pagesProceedings of SpiebobNo ratings yet
- How Does LiDAR For Raspberry Pi Work and Does It Offer SolutionsDocument12 pagesHow Does LiDAR For Raspberry Pi Work and Does It Offer SolutionsjackNo ratings yet
- R Live: A Robust, Real-Time, Rgb-Colored, Lidar-Inertial-Visual Tightly-Coupled State Estimation and Mapping PackageDocument8 pagesR Live: A Robust, Real-Time, Rgb-Colored, Lidar-Inertial-Visual Tightly-Coupled State Estimation and Mapping PackageShuai ZhangNo ratings yet
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1From EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1No ratings yet
- Benedetti Vander Woe RD 2014Document8 pagesBenedetti Vander Woe RD 2014Davide SchenoneNo ratings yet
- TE-1767 Web PDFDocument212 pagesTE-1767 Web PDFdiahwullyNo ratings yet
- John Ferguson (Auth.) - Mathematics in Geology-Springer Netherlands (1988)Document310 pagesJohn Ferguson (Auth.) - Mathematics in Geology-Springer Netherlands (1988)Davide Schenone100% (2)
- Terra Cropped PDFDocument478 pagesTerra Cropped PDFDavide SchenoneNo ratings yet
- PERELMAN, Y. Astronomy For Entertainment PDFDocument198 pagesPERELMAN, Y. Astronomy For Entertainment PDFjulieNo ratings yet
- Caribbean Studies (1) - Location of The CaribbeanDocument17 pagesCaribbean Studies (1) - Location of The Caribbeandawin_mornaNo ratings yet
- Leveraging Mgnrega For Flood Control A Case Study FR Policy Reform in BiharDocument55 pagesLeveraging Mgnrega For Flood Control A Case Study FR Policy Reform in BiharSanatNo ratings yet
- (Macmillan Science Library) Barry Max Brandenberger - Mathematics. Volume 3-Macmillan Reference USA (2002) PDFDocument230 pages(Macmillan Science Library) Barry Max Brandenberger - Mathematics. Volume 3-Macmillan Reference USA (2002) PDFFrank MillsNo ratings yet
- Manual de Registros DireccionalesDocument53 pagesManual de Registros DireccionalesJorge Enrique Montes CabreraNo ratings yet
- VCC Northern Lights Map 2017Document1 pageVCC Northern Lights Map 2017Ire MoratoNo ratings yet
- Stream Barbs Design and Installation GuideDocument24 pagesStream Barbs Design and Installation GuidepparejaNo ratings yet
- Mermaid 2 by KeikoJadeDocument7 pagesMermaid 2 by KeikoJadeCereal69100% (1)
- Analytical Exercise Solutions PDFDocument7 pagesAnalytical Exercise Solutions PDFct constructionNo ratings yet
- BlogDocument8 pagesBlogCarlo CalumbaNo ratings yet
- Aphg Final Exam Review by Sarah HandlerDocument35 pagesAphg Final Exam Review by Sarah HandlerbrandonNo ratings yet
- Philippine EIS System OverviewDocument107 pagesPhilippine EIS System OverviewMark Nicko Yabut Zablan100% (1)
- 11-052r4 OGC GeoSPARQL - A Geographic Query Language For RDF Data PDFDocument75 pages11-052r4 OGC GeoSPARQL - A Geographic Query Language For RDF Data PDF546892No ratings yet
- 2010-2011 Puyallup River Annual Salmon and Steelhead ReportDocument253 pages2010-2011 Puyallup River Annual Salmon and Steelhead ReportSteelhead711No ratings yet
- Journal The Medieval History: Developmental Hypothesis The Frontier and Royal Power in Medieval Spain: ADocument30 pagesJournal The Medieval History: Developmental Hypothesis The Frontier and Royal Power in Medieval Spain: AainplanesNo ratings yet
- Review Module 12 Surveying 1 May 2021 PART 2Document1 pageReview Module 12 Surveying 1 May 2021 PART 2eska sikatNo ratings yet
- LuciadRIA Browser Solution Data SheetDocument8 pagesLuciadRIA Browser Solution Data SheetStefano ParodiNo ratings yet
- 03 - SYNOPSIS - Garry CachoDocument11 pages03 - SYNOPSIS - Garry CachoSugar Ray0% (1)
- A Strange Place To Call HomeDocument7 pagesA Strange Place To Call HomeChronicleBooks33% (3)
- Probabilistic Assessment of Paglajhora Landslide Using Slope/wDocument4 pagesProbabilistic Assessment of Paglajhora Landslide Using Slope/wG Kishore KumarNo ratings yet
- Geography P2 Nov 2020 EngDocument16 pagesGeography P2 Nov 2020 EngAlfa VutiviNo ratings yet
- Cobrien Gis Specialist ResumeDocument1 pageCobrien Gis Specialist Resumeapi-81664419No ratings yet
- City of Lawrence Merrimack ST - MassWorks Ap - 08-28-14Document15 pagesCity of Lawrence Merrimack ST - MassWorks Ap - 08-28-14Dan RiveraNo ratings yet
- ATCOR For ERDAS IMAGINE 2010 - Manual PDFDocument225 pagesATCOR For ERDAS IMAGINE 2010 - Manual PDFLionel Ferro100% (1)
- Phpa Port Handbook A5 FNL Webres 1Document104 pagesPhpa Port Handbook A5 FNL Webres 1Ilias ZogosNo ratings yet
- Mapping Natural Hazards Geomorphology Belgium 2014Document7 pagesMapping Natural Hazards Geomorphology Belgium 2014Natasha JacobsNo ratings yet
- Grimaldi ENVR3300 Fall2014Document3 pagesGrimaldi ENVR3300 Fall2014Sara HerringNo ratings yet
- National Geographic USA 2014-12Document176 pagesNational Geographic USA 2014-12Ahmad Amir Azri60% (5)
- Terms of Reference For Survey Work - Rev 1Document3 pagesTerms of Reference For Survey Work - Rev 1kaustavmukherjee197888% (8)
- Pattern of Commuting: A Case Study in Aligarh City: International Journal of Humanities and Social Science ResearchDocument8 pagesPattern of Commuting: A Case Study in Aligarh City: International Journal of Humanities and Social Science ResearchDhruvaditya JainNo ratings yet