You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- VIDS Message Center Keypad Operator Instruction: D10R D11R D11R CDDocument24 pagesVIDS Message Center Keypad Operator Instruction: D10R D11R D11R CDADJIMGARNo ratings yet
- Appendix C: A Computer Algorithm For Obtaining From The SP LogDocument2 pagesAppendix C: A Computer Algorithm For Obtaining From The SP LogaowsNo ratings yet
- Resservoir 1Document3 pagesResservoir 1aowsNo ratings yet
- Reservoir Lab 1Document2 pagesReservoir Lab 1aowsNo ratings yet
- Fully Penetrating Vertical N Al FractureDocument3 pagesFully Penetrating Vertical N Al FractureaowsNo ratings yet
- Spwla Fourteenth Annual Logging Symposium, MAY 6-9, 1973: GIG Wells Field 229 WellsDocument3 pagesSpwla Fourteenth Annual Logging Symposium, MAY 6-9, 1973: GIG Wells Field 229 WellsaowsNo ratings yet
- Reservoir Lab 2Document3 pagesReservoir Lab 2aowsNo ratings yet
- Degree: Dual Laterlog Response in 3-D EnvironmentsDocument3 pagesDegree: Dual Laterlog Response in 3-D EnvironmentsaowsNo ratings yet
- PDR 0Document1 pagePDR 0aowsNo ratings yet
- Summary and Conclusions: Model InputsDocument3 pagesSummary and Conclusions: Model InputsaowsNo ratings yet
- About The Authors: Ellis MDocument1 pageAbout The Authors: Ellis MaowsNo ratings yet
- Oil 6Document3 pagesOil 6aowsNo ratings yet
- Historical Development: DQ A KQB DT - . ...................... (1) QDocument14 pagesHistorical Development: DQ A KQB DT - . ...................... (1) QaowsNo ratings yet
- PDR 1Document1 pagePDR 1aowsNo ratings yet
- Are Are For SMY: CCI Bars Crude W' A A and CrudeDocument1 pageAre Are For SMY: CCI Bars Crude W' A A and CrudeaowsNo ratings yet
- Efwedry 2Document1 pageEfwedry 2aowsNo ratings yet
- A Comparison of Theoretical DO1 With Experimen-Results. ConclusionDocument2 pagesA Comparison of Theoretical DO1 With Experimen-Results. ConclusionaowsNo ratings yet
- A Numerical Sensitivity Study Three Dimensional Imaging From A Single BoreholeDocument3 pagesA Numerical Sensitivity Study Three Dimensional Imaging From A Single BoreholeaowsNo ratings yet
- History Match Analysis - Petrel RE 2012Document1 pageHistory Match Analysis - Petrel RE 2012aowsNo ratings yet
- Example of Python Script: User Can Add As Many As Cross-Plots Needed Inside The ContainerDocument1 pageExample of Python Script: User Can Add As Many As Cross-Plots Needed Inside The ContaineraowsNo ratings yet
- Efwedry 2Document1 pageEfwedry 2aowsNo ratings yet
- Graphical Zone Editing Advanced Zone Creation: Editing/Adding Zones VsDocument1 pageGraphical Zone Editing Advanced Zone Creation: Editing/Adding Zones VsaowsNo ratings yet
- Historical Development: DQ A KQB DT - . ...................... (1) QDocument14 pagesHistorical Development: DQ A KQB DT - . ...................... (1) QaowsNo ratings yet
- Preserve It:: 6/6 Schlumberger PublicDocument1 pagePreserve It:: 6/6 Schlumberger PublicaowsNo ratings yet
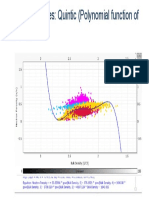
- Polynomial Shapes: Quintic (Polynomial Function of Degree 5)Document1 pagePolynomial Shapes: Quintic (Polynomial Function of Degree 5)aowsNo ratings yet
- Flow Zone 1Document1 pageFlow Zone 1aowsNo ratings yet
- HydsimDocument6 pagesHydsimaowsNo ratings yet
- Polynomial Shapes: Cubic (Polynomial Function of Degree 3)Document3 pagesPolynomial Shapes: Cubic (Polynomial Function of Degree 3)aowsNo ratings yet
- TocdDocument6 pagesTocdaowsNo ratings yet
- Radial: 20000 100 Tensile PlasticDocument7 pagesRadial: 20000 100 Tensile PlasticaowsNo ratings yet
- Data Load Into PETRELDocument2 pagesData Load Into PETRELaowsNo ratings yet
- RDBMS Lab Cycle 2Document3 pagesRDBMS Lab Cycle 2Harsha VardhanNo ratings yet
- SST 1700bDocument34 pagesSST 1700bDabi YannNo ratings yet
- Low-Side Switch Ics Spf5002A: (Surface-Mount 4-Circuits)Document2 pagesLow-Side Switch Ics Spf5002A: (Surface-Mount 4-Circuits)nurwi dikaNo ratings yet
- STS - Finals-The World Wide Web and BiodiversityDocument34 pagesSTS - Finals-The World Wide Web and BiodiversityChristian paul ArnaizNo ratings yet
- Math PyqDocument4 pagesMath Pyqsangwan2503banitaNo ratings yet
- Data Analyst Job DescriptionDocument16 pagesData Analyst Job DescriptionjannatbluebirdNo ratings yet
- Hafele Dialock BrochureDocument17 pagesHafele Dialock BrochureHùng Trần XuânNo ratings yet
- TPS 33 - Bahasa Inggris - FannyDocument9 pagesTPS 33 - Bahasa Inggris - FannySinta Fauziah UlfahNo ratings yet
- Csol 570 Network Visualization and Vulnerability Detection - Module 1 - Engineering Notes 1Document18 pagesCsol 570 Network Visualization and Vulnerability Detection - Module 1 - Engineering Notes 1api-694098467No ratings yet
- Load Management Part 2Document8 pagesLoad Management Part 2MaxiSanchezNo ratings yet
- Sqlmap Cheatsheet v1.0-SBDDocument2 pagesSqlmap Cheatsheet v1.0-SBDtalsxNo ratings yet
- Bim Modeler & Site EngineerDocument2 pagesBim Modeler & Site EngineerMOHAMMADNo ratings yet
- How To Install Dev-C++ and GLUTDocument15 pagesHow To Install Dev-C++ and GLUTMelquior PaniniNo ratings yet
- A Seminar Report On "Fluorescent Multilayer Disc": Prepared By: Shah Nilay K. 6 E.CDocument16 pagesA Seminar Report On "Fluorescent Multilayer Disc": Prepared By: Shah Nilay K. 6 E.CturakhiakrupaliNo ratings yet
- A Conceptual Model of Software TestingDocument12 pagesA Conceptual Model of Software TestingNisha JhaNo ratings yet
- Tabla KatanaDocument4 pagesTabla KatanaAntonioNo ratings yet
- Acceleration of Convolutional Neural Network Using FFT Based Split ConvolutionsDocument5 pagesAcceleration of Convolutional Neural Network Using FFT Based Split ConvolutionsMUPPALLA HEMA VARSHITANo ratings yet
- InstallationDocument111 pagesInstallationSuma P RNo ratings yet
- Applicationpedia - Snipping Tools To Take A Screenshot On WindowsDocument9 pagesApplicationpedia - Snipping Tools To Take A Screenshot On WindowsOecil KritingzNo ratings yet
- Sage ERP X3: Development Part 1 Exercises Level 1Document24 pagesSage ERP X3: Development Part 1 Exercises Level 1Yahya ChiguerNo ratings yet
- Operator PrecedenceDocument2 pagesOperator PrecedenceJaishree ChakareNo ratings yet
- New ResumeDocument6 pagesNew ResumeMichael EaganNo ratings yet
- Introduction To Design VerificationDocument60 pagesIntroduction To Design VerificationKesavaram ChallapalliNo ratings yet
- Jeff Bezos The Amazon FounderDocument3 pagesJeff Bezos The Amazon FounderNusrat AliNo ratings yet
- Programming Fundamentals in C 1.1Document193 pagesProgramming Fundamentals in C 1.1Sharaz HaiderNo ratings yet
- AXIS Camera Station S1148 Recorder: User ManualDocument39 pagesAXIS Camera Station S1148 Recorder: User ManualfguerreroaNo ratings yet
- Engineering Report Writing Using Word 2010: University of WaterlooDocument75 pagesEngineering Report Writing Using Word 2010: University of WaterlooRIANNE JUSTIN POLICARPIONo ratings yet
- OpenNebula WorkshopDocument5 pagesOpenNebula WorkshopThangavel MuruganNo ratings yet
- Startup-Basic: User ManualDocument16 pagesStartup-Basic: User ManualVA MaintNo ratings yet