You might also like
- 4-Way Table BT-1Document17 pages4-Way Table BT-1Moath AlshabiNo ratings yet
- We Reserve The Right To Change The Information in This Catalogue Without Prior NoticeDocument63 pagesWe Reserve The Right To Change The Information in This Catalogue Without Prior NoticeasyfingNo ratings yet
- Samsung Color Laser Printer CLP-31x Series ManualDocument8 pagesSamsung Color Laser Printer CLP-31x Series ManualandreyNo ratings yet
- Canon PC920 Service ManualDocument393 pagesCanon PC920 Service ManualAnthony O Brown IIINo ratings yet
- 992179811Document75 pages992179811Jesiel T SantosNo ratings yet
- Rev0 (Apollo EZ-IQ-N23)Document34 pagesRev0 (Apollo EZ-IQ-N23)l.n.a.92No ratings yet
- 50mm Differential Expansion Transducer System: Installation ManualDocument29 pages50mm Differential Expansion Transducer System: Installation Manualmehdi mNo ratings yet
- LC 32 40 46 52 Lx700e PDFDocument164 pagesLC 32 40 46 52 Lx700e PDFMarvin ConstantinoNo ratings yet
- CB Ep100Document146 pagesCB Ep100to0984903132No ratings yet
- Scorbot Er4u User ManualDocument41 pagesScorbot Er4u User Manualdaniel2442No ratings yet
- Nachi Manual CondensatDocument510 pagesNachi Manual CondensatPantea Ion100% (3)
- A741 General-Purpose Operational Amplifiers: 1 Features 3 DescriptionDocument25 pagesA741 General-Purpose Operational Amplifiers: 1 Features 3 DescriptionirruxunneqNo ratings yet
- Siglent SDS1102CMLDocument6 pagesSiglent SDS1102CMLDukof FokudNo ratings yet
- P1lobfka 4n0Document194 pagesP1lobfka 4n0man wai ChanNo ratings yet
- Service Manual: EZ ControllerDocument160 pagesService Manual: EZ ControllerEcho CanyonNo ratings yet
- A741 General-Purpose Operational Amplifiers: 1 Features 3 DescriptionDocument27 pagesA741 General-Purpose Operational Amplifiers: 1 Features 3 Description19thmnlfreemsNo ratings yet
- A741 General-Purpose Operational Amplifiers: 1 Features 3 DescriptionDocument27 pagesA741 General-Purpose Operational Amplifiers: 1 Features 3 DescriptionАнтон100% (1)
- CX-500+400+300 - Users ManualDocument64 pagesCX-500+400+300 - Users Manualdyc69ftNo ratings yet
- Mitsubishi Q64DA Series Anolog Module User ManualDocument186 pagesMitsubishi Q64DA Series Anolog Module User ManualZall Boed-zilsNo ratings yet
- Digsilent Powerfactory: Relay Model DescriptionDocument17 pagesDigsilent Powerfactory: Relay Model DescriptionBra BicabaNo ratings yet
- EN35SER_2Document794 pagesEN35SER_2Daniel Silva CoimbraNo ratings yet
- LM 2588Document40 pagesLM 25888403c36589584aNo ratings yet
- ExtaxesDocument50 pagesExtaxesredoctober24No ratings yet
- QSS-33 Service Manual GuideDocument876 pagesQSS-33 Service Manual Guidesunil12579No ratings yet
- Wireline Logging Tools Setup and CalibrationDocument17 pagesWireline Logging Tools Setup and CalibrationArdita S IrwanNo ratings yet
- A741 General-Purpose Operational Amplifiers: 1 Features 3 DescriptionDocument28 pagesA741 General-Purpose Operational Amplifiers: 1 Features 3 DescriptionJonathan Clemente SánchezNo ratings yet
- Jt100 - Operators ManualDocument268 pagesJt100 - Operators ManualMarcelo MalagoNo ratings yet
- Tk3e2 ManualDocument44 pagesTk3e2 ManualDuyệt Đinh Xuân67% (3)
- Samsung hp-t4254 hp-t5054 (SM)Document96 pagesSamsung hp-t4254 hp-t5054 (SM)Oscar Andres Ramirez AmayaNo ratings yet
- Snoa543a Low NoiseDocument9 pagesSnoa543a Low Noisesteviej85No ratings yet
- SIFANG - CSC-211 Numerical Backup Relay Manual (F0SF.451.085ER) - V1.10Document63 pagesSIFANG - CSC-211 Numerical Backup Relay Manual (F0SF.451.085ER) - V1.10MarkusKunNo ratings yet
- Samsung Color Laser CLP 310 CLP 315 Series Service Manual Free PDFDocument8 pagesSamsung Color Laser CLP 310 CLP 315 Series Service Manual Free PDFManuel SottoNo ratings yet
- Initial Design ConsiderationsDocument8 pagesInitial Design ConsiderationsioanchiNo ratings yet
- Kaito-Matic CAN Operating InstructionsDocument68 pagesKaito-Matic CAN Operating InstructionsWily Wayer100% (1)
- LG HT355SD DVD Receiver ManualDocument61 pagesLG HT355SD DVD Receiver ManualZxdIaminxXzlovewithzxXzyouzx67% (3)
- Lmx31X Precision Voltage-To-Frequency Converters: 1 Features 3 DescriptionDocument23 pagesLmx31X Precision Voltage-To-Frequency Converters: 1 Features 3 DescriptionJavierPariNo ratings yet
- Lmx31X Precision Voltage-To-Frequency Converters: 1 Features 3 DescriptionDocument24 pagesLmx31X Precision Voltage-To-Frequency Converters: 1 Features 3 DescriptionShruthi reddyNo ratings yet
- Lmx31X Precision Voltage-To-Frequency Converters: 1 Features 3 DescriptionDocument23 pagesLmx31X Precision Voltage-To-Frequency Converters: 1 Features 3 DescriptionAndres Felipe Perez BustamanteNo ratings yet
- Lm331 Voltaje A FrecuenciaDocument24 pagesLm331 Voltaje A FrecuenciaLeguel LNo ratings yet
- Lmx31X Precision Voltage-To-Frequency Converters: 1 Features 3 DescriptionDocument23 pagesLmx31X Precision Voltage-To-Frequency Converters: 1 Features 3 DescriptionJayant KirpekarNo ratings yet
- VSB ManualDocument166 pagesVSB Manualmukul9040No ratings yet
- LM2587 4-V To 40-V, 5-A Step-Up Wide V Flyback Regulator: IN 1 Features 3 DescriptionDocument39 pagesLM2587 4-V To 40-V, 5-A Step-Up Wide V Flyback Regulator: IN 1 Features 3 DescriptionBINIYAM BERHENo ratings yet
- V107-E1-04+NB Series Setup ManualDocument102 pagesV107-E1-04+NB Series Setup ManualNelson OrnelasNo ratings yet
- LM 2586Document43 pagesLM 2586Cristobal MartinezNo ratings yet
- Modular Collator Base: ManualDocument68 pagesModular Collator Base: ManualRobot 3TNo ratings yet
- Huvitz CAB-4000 Manual Utilizare PDFDocument89 pagesHuvitz CAB-4000 Manual Utilizare PDFPetrica DascaluNo ratings yet
- DI380 Op GuideDocument76 pagesDI380 Op GuideAlaa RefaatNo ratings yet
- np6512 SMDocument426 pagesnp6512 SMj1cutterNo ratings yet
- BA Loop-Tester V1.1 GBDocument16 pagesBA Loop-Tester V1.1 GBemporiofrikiNo ratings yet
- 11AK44 Service ManualDocument56 pages11AK44 Service ManualioanamonicapaunNo ratings yet
- Color Laser Printer Service ManualDocument174 pagesColor Laser Printer Service ManualGiorgos NikitopoylosNo ratings yet
- RH850/F1x 100-Pin RH850/R1x 100-PinDocument35 pagesRH850/F1x 100-Pin RH850/R1x 100-Pinmurtadha 2016No ratings yet
- 44zi3vzh RLHDocument120 pages44zi3vzh RLHman wai ChanNo ratings yet
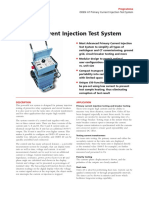
- FPIT DescDocument9 pagesFPIT Desckamalmoh1981No ratings yet
- 08-40.3 e Microcal 20dpc - LowDocument8 pages08-40.3 e Microcal 20dpc - LowhNo ratings yet
- WLZ 2D DiagramDocument20 pagesWLZ 2D DiagramhNo ratings yet
- 01-01.3 E WKS - Low PDFDocument2 pages01-01.3 E WKS - Low PDFhNo ratings yet
- CBA32 16p ManualDocument29 pagesCBA32 16p ManualhNo ratings yet
- 09 Sasic Testing of Stator CoresDocument43 pages09 Sasic Testing of Stator CoreshNo ratings yet
- Working Standard Secondary Reference: Multifunction CalibratorsDocument2 pagesWorking Standard Secondary Reference: Multifunction CalibratorshNo ratings yet
- CBA32 16p ManualDocument29 pagesCBA32 16p ManualhNo ratings yet
- Oden at - 2hDocument7 pagesOden at - 2hhNo ratings yet
- Experience and Benefit of Using El-Cid For Turbine-GeneratorsDocument16 pagesExperience and Benefit of Using El-Cid For Turbine-GeneratorsSayan AichNo ratings yet
- Microcal Series: One & Two Channel Palm-Top Multifunction CalibratorsDocument2 pagesMicrocal Series: One & Two Channel Palm-Top Multifunction CalibratorshNo ratings yet
- Ap LucDocument12 pagesAp LuchNo ratings yet
- Maintenance and Testing of Substation EquipmentDocument88 pagesMaintenance and Testing of Substation EquipmentRajeev SharmaNo ratings yet
- W810i Service ManualDocument53 pagesW810i Service Manualamdomalik100% (2)
- Installation Manual 3ats, 3adts, 3Nts, 3Ndts G-Design 1600-3200 A Transfer SwitchesDocument8 pagesInstallation Manual 3ats, 3adts, 3Nts, 3Ndts G-Design 1600-3200 A Transfer SwitchesMahmoud M.AbdelalimNo ratings yet
- 701MRF de PDFDocument92 pages701MRF de PDFPetros TsenesNo ratings yet
- Bright New 42-inch and 47-inch FULL-HD LCD Displays for SignageDocument2 pagesBright New 42-inch and 47-inch FULL-HD LCD Displays for SignageKerrin HardyNo ratings yet
- Datasheet: Samsung Emmc Movinand Product FamilyDocument25 pagesDatasheet: Samsung Emmc Movinand Product FamilyFady AllDoikNo ratings yet
- Pirated Movie Release TypeDocument5 pagesPirated Movie Release TypeNitir AseemNo ratings yet
- 2023 PG SubstationEquipment-eDocument2 pages2023 PG SubstationEquipment-eUsman KhanNo ratings yet
- Fuel AditiveDocument3 pagesFuel AditiveopralinaNo ratings yet
- STGW50H65DFB2 4Document15 pagesSTGW50H65DFB2 4shivguptaNo ratings yet
- KL3045Document9 pagesKL3045Bruna RamosNo ratings yet
- Magnavox 32MF338BDocument93 pagesMagnavox 32MF338BJames SouthNo ratings yet
- 3 Operation Instructions, PLC SystemDocument25 pages3 Operation Instructions, PLC SystemheemaNo ratings yet
- 22.IGBT Based Close Loop Speed Control of Universal MotorDocument3 pages22.IGBT Based Close Loop Speed Control of Universal MotorANAND KRISHNANNo ratings yet
- Actividad 2. Comparativo de Circuitos DigitalesDocument8 pagesActividad 2. Comparativo de Circuitos DigitalesArmando Guerrero RochaNo ratings yet
- Wrfase Acceptance Letter 360 PDFDocument3 pagesWrfase Acceptance Letter 360 PDFRizka SeptianaNo ratings yet
- Internship Report Complete1Document48 pagesInternship Report Complete1Kaayyoo Koobeeka100% (5)
- Build Simulink file and connect variables in ControlDeskDocument5 pagesBuild Simulink file and connect variables in ControlDeskcristian_chituNo ratings yet
- Rail to Rail Op-Amps from STMicroelectronicsDocument10 pagesRail to Rail Op-Amps from STMicroelectronicsantonio170172No ratings yet
- Pages From Cir2 - Lect - 8 - Introduction - To - Poly - Phase PDFDocument33 pagesPages From Cir2 - Lect - 8 - Introduction - To - Poly - Phase PDFHAMID SULIAMANNo ratings yet
- Lithium-Ion Stationary Battery Capacity Sizing Formula For The Establishment of Industrial DesignDocument7 pagesLithium-Ion Stationary Battery Capacity Sizing Formula For The Establishment of Industrial Design장중구100% (1)
- Driver Gcr-8521b UsermanualDocument12 pagesDriver Gcr-8521b UsermanualCristian TutuianuNo ratings yet
- Sun Power Pakistan: 3KW Solar System ProposalDocument4 pagesSun Power Pakistan: 3KW Solar System ProposalSufyan WahabNo ratings yet
- Permanent Magnet Linear Transverse Flux MotorsDocument6 pagesPermanent Magnet Linear Transverse Flux Motorsarnika33No ratings yet
- Summer Internship Report 1Document35 pagesSummer Internship Report 1Hitesh Ahuja0% (1)
- Analog Electronics - U. A. Bakshi and A. P. GodseDocument124 pagesAnalog Electronics - U. A. Bakshi and A. P. GodseIrfan M IrshadNo ratings yet
- Dx35 Mid Range Distance Sensors: Larger Than Life Performance - Flexible Measurement and Detection Up To 35 MDocument20 pagesDx35 Mid Range Distance Sensors: Larger Than Life Performance - Flexible Measurement and Detection Up To 35 MSergio Alejandro MartinezNo ratings yet
- 1a33 TDS PDFDocument2 pages1a33 TDS PDFFerrovolNo ratings yet
- Alteradores MarathonDocument8 pagesAlteradores MarathonSalineñoApasionadoNo ratings yet
- CoT Pro Instruction ManualDocument20 pagesCoT Pro Instruction ManualSeno PatiNo ratings yet