You might also like
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Carrier Modulation: Version 2 ECE IIT, KharagpurDocument7 pagesCarrier Modulation: Version 2 ECE IIT, KharagpurRahul PanwarNo ratings yet
- Intern Guidance - Research ProposalDocument15 pagesIntern Guidance - Research ProposalhariNo ratings yet
- Semester 2 (January 1 - May 2, 2018)Document2 pagesSemester 2 (January 1 - May 2, 2018)tarakNo ratings yet
- Exercise ProblemsDocument2 pagesExercise ProblemshariNo ratings yet
- Module-23 - Nyquist Stability Criterion: EE3101-Control Systems EngineeringDocument7 pagesModule-23 - Nyquist Stability Criterion: EE3101-Control Systems EngineeringhariNo ratings yet
- Shift Keying PDFDocument7 pagesShift Keying PDFYogesh TiwariNo ratings yet
- m5l22 Ber SerDocument9 pagesm5l22 Ber SerSanjay MeenaNo ratings yet
- Fee Details 2013-14 Admitted Batch (E2Document18 pagesFee Details 2013-14 Admitted Batch (E2hariNo ratings yet
- Cse 1.27 RMDocument7 pagesCse 1.27 RMhariNo ratings yet
- FTP PDFDocument1 pageFTP PDFhariNo ratings yet
- Digital System Design: Course Educational ObjectivesDocument5 pagesDigital System Design: Course Educational ObjectiveshariNo ratings yet
- CSLP 1.1 RMDocument7 pagesCSLP 1.1 RMhariNo ratings yet
- Module-17 - Routh-Hurwitz Criterion: EE3101-Control Systems EngineeringDocument8 pagesModule-17 - Routh-Hurwitz Criterion: EE3101-Control Systems EngineeringhariNo ratings yet
- MIT6 02F12 Chap02Document12 pagesMIT6 02F12 Chap02gautruc408No ratings yet
- Control Systems Engineering Block Diagram and ExamplesDocument6 pagesControl Systems Engineering Block Diagram and ExampleshariNo ratings yet
- MIT6 02F12 Lec03Document31 pagesMIT6 02F12 Lec03hariNo ratings yet
- Module 14: Leadership Learning Objectives: George TerryDocument11 pagesModule 14: Leadership Learning Objectives: George TerryhariNo ratings yet
- Verlogic3 Chapter7Document56 pagesVerlogic3 Chapter7hariNo ratings yet
- BOM Motivation (Unit III)Document20 pagesBOM Motivation (Unit III)hariNo ratings yet
- BOM OrganizingDocument30 pagesBOM OrganizinghariNo ratings yet
- Bom MboDocument10 pagesBom MbohariNo ratings yet
- BOM Leadership Unit IIIDocument23 pagesBOM Leadership Unit IIIhariNo ratings yet
- Ay2017-18 Sem-1 Est TimetableDocument3 pagesAy2017-18 Sem-1 Est TimetablehariNo ratings yet
- BiometricsDocument3 pagesBiometricshariNo ratings yet
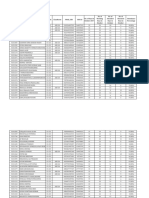
- StudentsAttendanceOctober 2017 07112017-F2Document173 pagesStudentsAttendanceOctober 2017 07112017-F2hariNo ratings yet
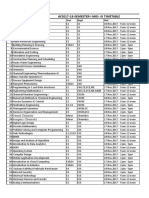
- AY2017-18 SEMESTER I MID-III TIMETABLEDocument6 pagesAY2017-18 SEMESTER I MID-III TIMETABLEhariNo ratings yet
- Ay2017-18 Sem-1 Est TimetableDocument3 pagesAy2017-18 Sem-1 Est TimetablehariNo ratings yet
- Asmcharts 2Document22 pagesAsmcharts 2Nandipati Vishnu TejaNo ratings yet
- FTP PDFDocument1 pageFTP PDFhariNo ratings yet
- Fee Details 2013-14 Admitted Batch (E2Document18 pagesFee Details 2013-14 Admitted Batch (E2hariNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Pfr140 User ManualDocument4 pagesPfr140 User ManualOanh NguyenNo ratings yet
- The Dominant Regime Method - Hinloopen and Nijkamp PDFDocument20 pagesThe Dominant Regime Method - Hinloopen and Nijkamp PDFLuiz Felipe GuaycuruNo ratings yet
- Gabinete STS Activity1Document2 pagesGabinete STS Activity1Anthony GabineteNo ratings yet
- Bad DayDocument3 pagesBad DayLink YouNo ratings yet
- Induction ClassesDocument20 pagesInduction ClassesMichelle MarconiNo ratings yet
- DBMS Architecture FeaturesDocument30 pagesDBMS Architecture FeaturesFred BloggsNo ratings yet
- Weone ProfileDocument10 pagesWeone ProfileOmair FarooqNo ratings yet
- Uniform-Section Disk Spring AnalysisDocument10 pagesUniform-Section Disk Spring Analysischristos032No ratings yet
- Public Private HEM Status AsOn2May2019 4 09pmDocument24 pagesPublic Private HEM Status AsOn2May2019 4 09pmVaibhav MahobiyaNo ratings yet
- Equilibruim of Forces and How Three Forces Meet at A PointDocument32 pagesEquilibruim of Forces and How Three Forces Meet at A PointSherif Yehia Al MaraghyNo ratings yet
- Iphoneos 31Document159 pagesIphoneos 31Ivan VeBoNo ratings yet
- Final Year Project (Product Recommendation)Document33 pagesFinal Year Project (Product Recommendation)Anurag ChakrabortyNo ratings yet
- Cell Organelles ColoringDocument2 pagesCell Organelles ColoringThomas Neace-FranklinNo ratings yet
- Mutual Fund PDFDocument22 pagesMutual Fund PDFRajNo ratings yet
- Job Order Costing: Patrick Louie E. Reyes, CTT, Micb, Rca, CpaDocument45 pagesJob Order Costing: Patrick Louie E. Reyes, CTT, Micb, Rca, CpaClaudette Clemente100% (1)
- Rapport DharaviDocument23 pagesRapport DharaviUrbanistes du MondeNo ratings yet
- Hi-Line Sportsmen Banquet Is February 23rd: A Chip Off The Ol' Puck!Document8 pagesHi-Line Sportsmen Banquet Is February 23rd: A Chip Off The Ol' Puck!BS Central, Inc. "The Buzz"No ratings yet
- WWW - Commonsensemedia - OrgDocument3 pagesWWW - Commonsensemedia - Orgkbeik001No ratings yet
- Composite Structures: A. Grimaldi, A. Sollo, M. Guida, F. MaruloDocument15 pagesComposite Structures: A. Grimaldi, A. Sollo, M. Guida, F. MaruloSharan KharthikNo ratings yet
- Busbar sizing recommendations for Masterpact circuit breakersDocument1 pageBusbar sizing recommendations for Masterpact circuit breakersVikram SinghNo ratings yet
- Brochure en 2014 Web Canyon Bikes How ToDocument36 pagesBrochure en 2014 Web Canyon Bikes How ToRadivizija PortalNo ratings yet
- Rubric 5th GradeDocument2 pagesRubric 5th GradeAlbert SantosNo ratings yet
- Case Study IndieDocument6 pagesCase Study IndieDaniel YohannesNo ratings yet
- Philippine Population 2009Document6 pagesPhilippine Population 2009mahyoolNo ratings yet
- Dolni VestoniceDocument34 pagesDolni VestoniceOlha PodufalovaNo ratings yet
- Production of Sodium Chlorite PDFDocument13 pagesProduction of Sodium Chlorite PDFangelofgloryNo ratings yet
- Longman ESOL Skills For Life - ShoppingDocument4 pagesLongman ESOL Skills For Life - ShoppingAstri Natalia Permatasari83% (6)
- Returnable Goods Register: STR/4/005 Issue 1 Page1Of1Document1 pageReturnable Goods Register: STR/4/005 Issue 1 Page1Of1Zohaib QasimNo ratings yet
- Computer Networks Transmission Media: Dr. Mohammad AdlyDocument14 pagesComputer Networks Transmission Media: Dr. Mohammad AdlyRichthofen Flies Bf109No ratings yet
- CALCULUS PHYSICS MIDTERMDocument41 pagesCALCULUS PHYSICS MIDTERMMACARIO QTNo ratings yet