You might also like
- A Simple Replacment For The Drift Spectrum 2002 Engineering StructuresDocument8 pagesA Simple Replacment For The Drift Spectrum 2002 Engineering Structuresldd1216No ratings yet
- Seismic Rehabilitation of Beam Column Joint Using GFRP Sheets 2002 Engineering StructuresDocument11 pagesSeismic Rehabilitation of Beam Column Joint Using GFRP Sheets 2002 Engineering Structuresldd1216No ratings yet
- Simplified Seismic Analysis of A Class of Regular Steel Bridges - 2002 - Engineering Structures PDFDocument14 pagesSimplified Seismic Analysis of A Class of Regular Steel Bridges - 2002 - Engineering Structures PDFldd1216No ratings yet
- Spatial Response Spectra and Site Amplification Effects 2002 Engineering StructuresDocument12 pagesSpatial Response Spectra and Site Amplification Effects 2002 Engineering Structuresldd1216No ratings yet
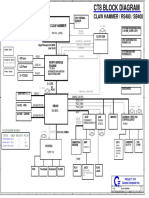
- HP Ze2000 - Quanta CT8 - Rev 3B PDFDocument42 pagesHP Ze2000 - Quanta CT8 - Rev 3B PDFldd1216No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- July 6 959PMDocument160 pagesJuly 6 959PMJADEL ALCANTARANo ratings yet
- PDF/ Creative Aqnd Innovative Management in Sony CompanyDocument13 pagesPDF/ Creative Aqnd Innovative Management in Sony CompanySmith Subba75% (4)
- STAT 2300 General SyllabusDocument6 pagesSTAT 2300 General SyllabusjbkjNo ratings yet
- Mobile Secure Examination System: Cyril Alosious P Sundar Raj MDocument4 pagesMobile Secure Examination System: Cyril Alosious P Sundar Raj MEditor IJRITCCNo ratings yet
- Agrarian Crisis in Vidarbha by Vasant - FutaneDocument4 pagesAgrarian Crisis in Vidarbha by Vasant - FutaneNaveen BharathiNo ratings yet
- MGE Motors: Installation and Operating InstructionsDocument76 pagesMGE Motors: Installation and Operating InstructionsJocelito MaiaNo ratings yet
- K56300 - K56390 Operation Manual PDFDocument12 pagesK56300 - K56390 Operation Manual PDFGisela AlfonsoNo ratings yet
- Comparative Study in LTC Combustion Between HP Egr and Variable Lift and DurationDocument10 pagesComparative Study in LTC Combustion Between HP Egr and Variable Lift and DurationSachin ShastriNo ratings yet
- Inspection Report No. 73Document3 pagesInspection Report No. 73Rahul MoottolikandyNo ratings yet
- Biginners Introduction To Avr AssemblyDocument73 pagesBiginners Introduction To Avr AssemblyTanvir Hussain100% (10)
- Max Session-IDocument28 pagesMax Session-IelrajilNo ratings yet
- Macroshock HazardsDocument14 pagesMacroshock HazardsK.R.Raguram0% (1)
- Honda's Rise to Becoming the World's Largest Motorcycle ManufacturerDocument1 pageHonda's Rise to Becoming the World's Largest Motorcycle ManufacturerShankarNo ratings yet
- Global Strategy SyllabusDocument28 pagesGlobal Strategy SyllabusjulioruizNo ratings yet
- Heavy Gear DP9-008 - Tactical Air Support PDFDocument114 pagesHeavy Gear DP9-008 - Tactical Air Support PDFTaekyongKim100% (2)
- New Resins For Dental Composites: A.P.P. Fugolin and C.S. PfeiferDocument7 pagesNew Resins For Dental Composites: A.P.P. Fugolin and C.S. PfeiferorizaNo ratings yet
- Firefighting Tools J Equipment J and Apparatus 100Document9 pagesFirefighting Tools J Equipment J and Apparatus 100Eugene Alpheus AvilaNo ratings yet
- KFC Philippines Shaw Branch delivery service process case studyDocument2 pagesKFC Philippines Shaw Branch delivery service process case studyJann KerkyNo ratings yet
- New Vlist of All Members BuildersDocument37 pagesNew Vlist of All Members BuildersStrategic Concepts India Pvt Ltd100% (2)
- Chapter 10 Asset Management 2014 From Machine To Machine To The Internet of ThingsDocument8 pagesChapter 10 Asset Management 2014 From Machine To Machine To The Internet of ThingsDaviti GachechiladzeNo ratings yet
- Module 3 Activity No. 2Document5 pagesModule 3 Activity No. 2Ariel GamboaNo ratings yet
- Terratec RBM BrochureDocument5 pagesTerratec RBM Brochuremanuel_plf100% (1)
- Cummins Isx Fuel Pump Diagram Beautiful Cummins Isx Cm870 Wiring Diagram Ecm Trusted Wiring DiagramsDocument2 pagesCummins Isx Fuel Pump Diagram Beautiful Cummins Isx Cm870 Wiring Diagram Ecm Trusted Wiring DiagramsThanh Nguyen CongNo ratings yet
- Micro Range Finder - Enhanced - Low Power: TDS323, A-5 1Document2 pagesMicro Range Finder - Enhanced - Low Power: TDS323, A-5 1enr rojNo ratings yet
- Multi - Modal Transport Hub at Kozhikode (Live Project) Incorporating Way Finding Through ArchitectureDocument4 pagesMulti - Modal Transport Hub at Kozhikode (Live Project) Incorporating Way Finding Through ArchitectureMathew WilsonNo ratings yet
- Sika-Wrap Struct StrengthDocument7 pagesSika-Wrap Struct StrengthMiky CastenNo ratings yet
- GTB-BOL VetrificadoDocument19 pagesGTB-BOL VetrificadoelduenoNo ratings yet
- Shree Kumar Maharjan Curriculum VitaeDocument8 pagesShree Kumar Maharjan Curriculum VitaeShree Kumar MaharjanNo ratings yet
- Silabus CRM Ekstensi-Genap20142015 v2Document2 pagesSilabus CRM Ekstensi-Genap20142015 v2Nur Fitriah Ayuning BudiNo ratings yet
- Sail Along Silvery MoonpartiturDocument6 pagesSail Along Silvery MoonpartiturDieterKordesNo ratings yet